盲人出行问题一直是社会关注的焦点,尤其是在复杂的城市环境中,盲人面临着无数的障碍物,如路障、行人、车辆等,这些障碍物对他们的出行安全造成了极大的挑战。尽管现有的无障碍设施和辅助设备不断进步,然而在实际应用中,许多传统的障碍物检测技术依然存在精度低、实时性差、适应性差等问题,无法有效帮助盲人避开潜在的危险。为了解决这些问题,基于深度学习的**RT-DETR(Real-Time DEtection Transformer)**算法应运而生,成为了提升盲人出行安全的重要技术手段。
痛点:传统技术无法满足盲人出行的实际需求
在盲人日常出行中,他们依赖的辅助设备(如智能手杖、盲人眼镜等)需要高效地识别并避开周围的障碍物。传统的目标检测方法通常存在以下问题:
- 低精度:传统方法在复杂场景下(如人流密集、光照变化、不同障碍物类型等)往往无法准确识别障碍物,导致盲人可能误判周围环境。
- 实时性差:在城市中,障碍物的位置和类型动态变化,传统方法难以做到实时、迅速反应,造成盲人在行走过程中无法及时获得反馈。
- 环境适应性差:现有的检测技术在面对多变的天气、复杂的地理环境等时,准确率大幅下降,无法为盲人提供稳定的安全保障。
RT-DETR算法:深度学习技术的创新突破
RT-DETR(Real-Time DEtection Transformer)是一种基于深度学习的目标检测算法,结合了Transformer的高效特性与卷积神经网络(CNN)的强大视觉处理能力,能够实时高效地识别图像中的多个目标。在盲人障碍物检测中,RT-DETR的优势尤为突出。
RT-DETR的核心优势:
- 高效目标检测:RT-DETR通过引入Transformer架构,使得模型能够捕捉到图像中的全局上下文信息,准确识别不同类型的障碍物,如行人、车辆、路障等,并能够对动态障碍物进行实时追踪。
- 快速响应:RT-DETR的推理速度远超传统的目标检测算法,适合在边缘设备(如智能手杖、智能眼镜等)上部署,保证盲人在行走过程中能够实时得到障碍物的预警。
- 强大适应性:RT-DETR能够在不同光照、天气和场景条件下进行自适应调整,保持高精度的障碍物检测能力,提升盲人出行的安全性。
- 多目标检测:RT-DETR支持对多个目标的同时检测,能够在复杂环境中识别多个障碍物,帮助盲人更好地规划行进路线,避开潜在的危险。
完整数据集:为精准检测提供坚实基础
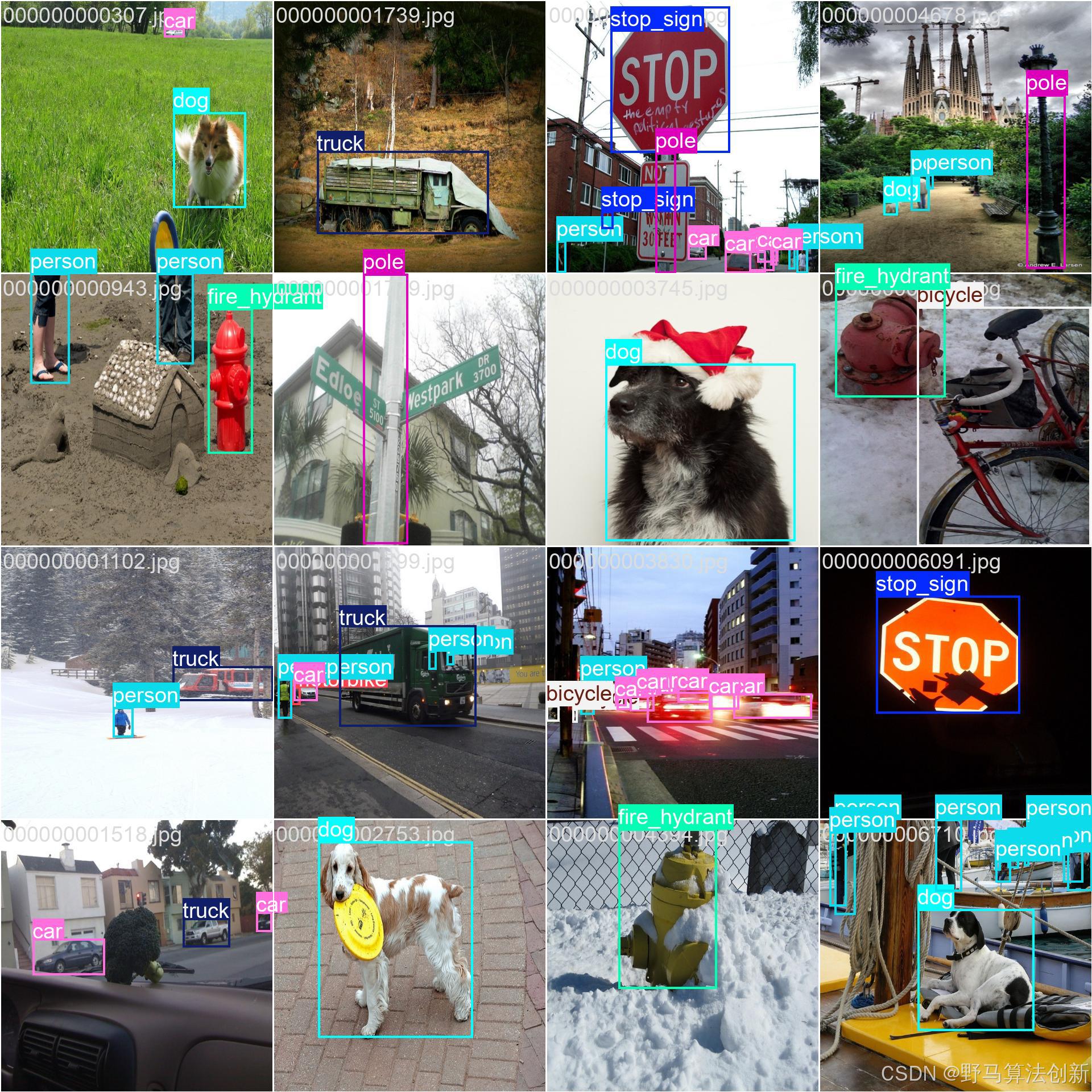
为了训练RT-DETR模型,需要一个高质量、多样化的数据集。该数据集不仅包含了不同类型的障碍物(如行人、车辆、障碍物等),还包括了不同环境条件下的图像数据(如白天、夜晚、雨天等)。数据集的多样性保证了模型能够在各种实际场景下进行有效训练,进一步提高了模型的泛化能力。
数据集特点:
- 多场景覆盖:数据集涵盖了城市街道、公园、小区等盲人可能遇到的不同场景,提供了丰富的障碍物样本,确保模型能够应对复杂多变的现实环境。
- 精确标注:每个图像中的障碍物都有详细的标注信息,包括目标类别、位置、尺寸等,为模型的训练提供了准确的标签,提升了检测精度。
- 大规模样本 :数据集包含大量的标注图像,确保模型能够在足够多的样本上进行训练,提升了模型的鲁棒性和泛化能力。

应用场景:智能化盲人出行系统
基于RT-DETR算法的盲人障碍物检测技术,能够广泛应用于各种智能辅助出行系统,显著提升盲人出行的安全性和便捷性。以下是几种典型的应用场景:
- 智能手杖:将RT-DETR算法集成到智能手杖中,实时检测盲人前方的障碍物,利用震动或声音反馈的方式,及时提醒盲人避开障碍物。
- 智能眼镜:通过将RT-DETR应用于智能眼镜,盲人可以通过语音提示了解周围障碍物的类型和位置,帮助其更好地规划行进路线。
- 穿戴设备:RT-DETR算法可以嵌入到穿戴设备(如智能耳机、手表等)中,通过声音或震动反馈,帮助盲人避开障碍物,确保他们的出行安全。