基于FPGA的PID算法学习---------实现P比例控制算法
前言
学习内容:参考网站:
PID算法控制
PID即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。也就是说,PID算法是结合这三种环节在一起的。
闭环控制:输出会影响到输入,进而逐渐逼近目标。
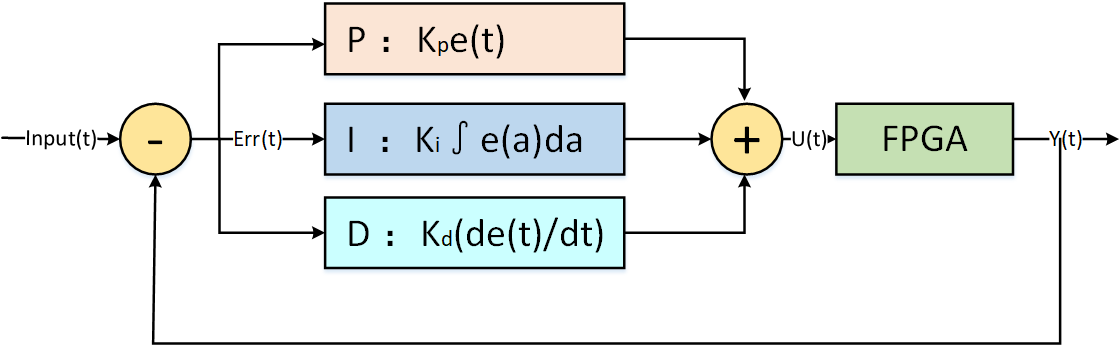
一、P比例算法控制
P比例控制算法:
核心部分,大部分作用来自于P,I和D主要控制减小误差。
目标值:Target
实际值:Pid_out
误差值:e_t
弥补值:u_t
相关公式:
误差值:e_t=Target - Pid_out
弥补值:u(t)=Kp * e(t)
输出值:Pid_out = Pid_out + u(t)
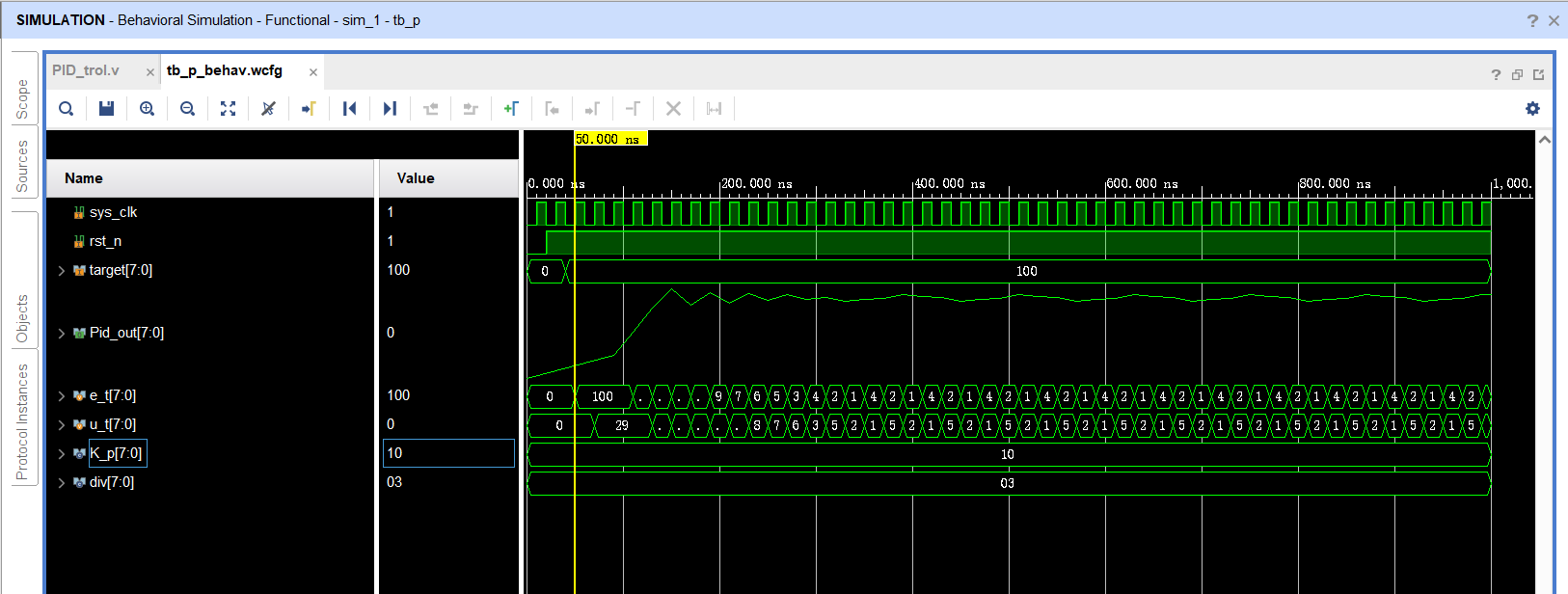
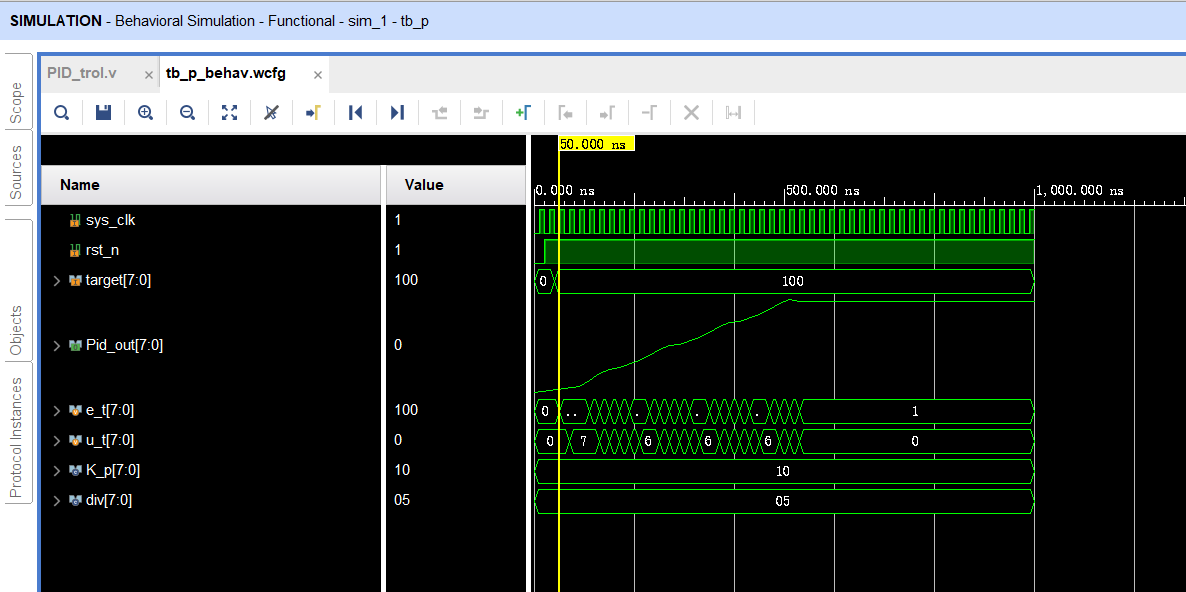
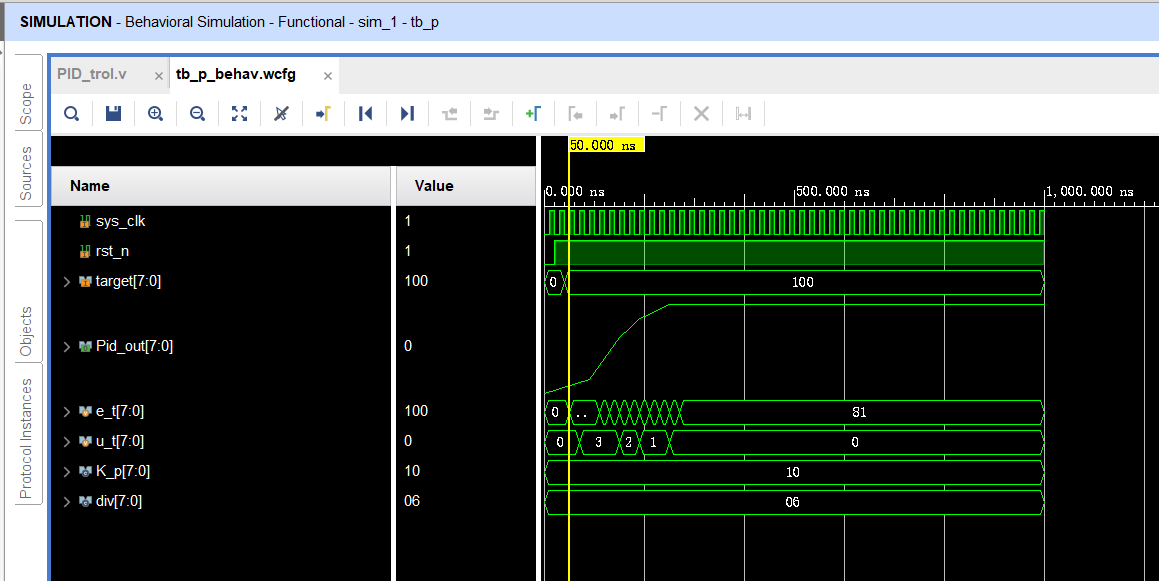
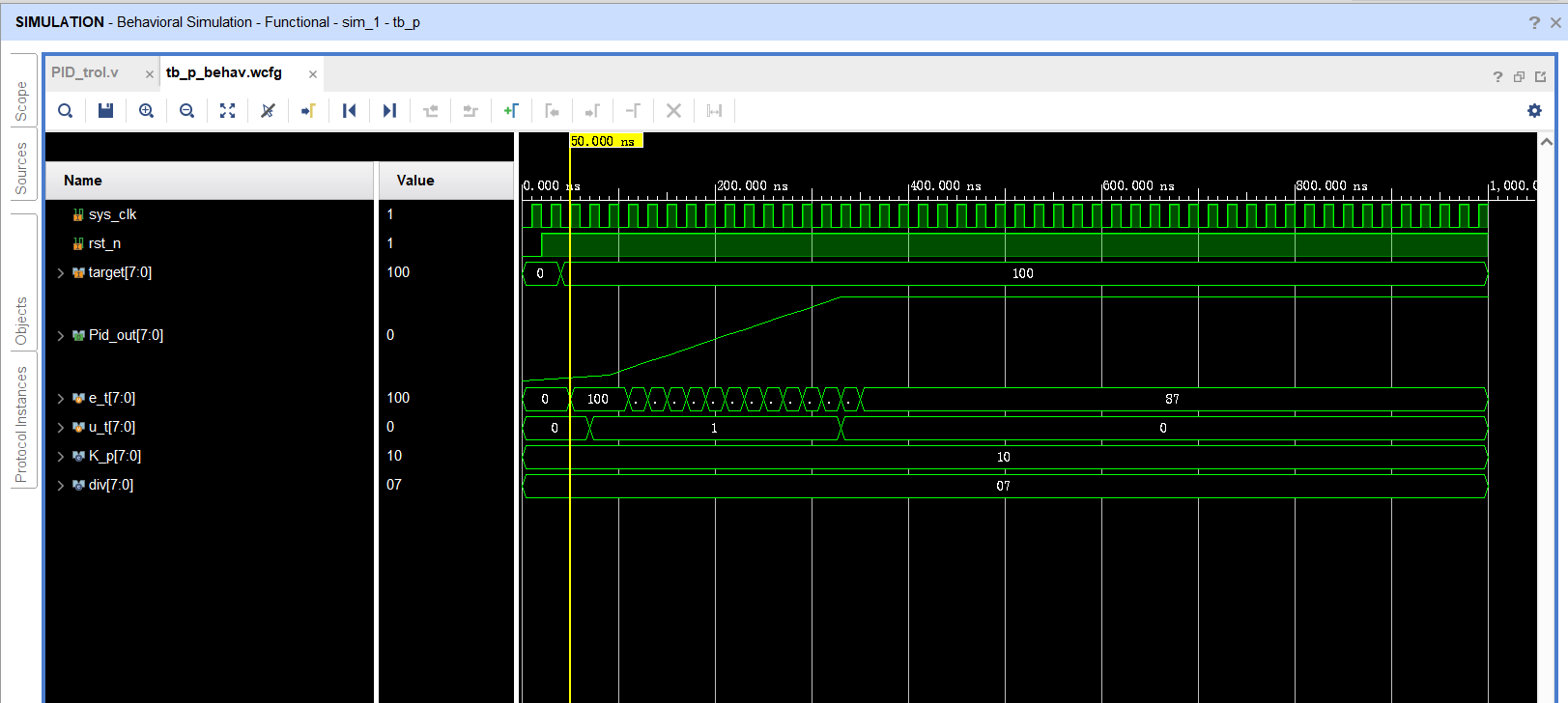
二、FPGA仿真验证
真实的K_p = K_p / 2^div
c
module PID_trol(
input sys_clk ,
input rst_n,
//signal
input [7:0] target,
output reg [7:0] Pid_out
);
reg [7:0] e_t;//目标值和现在值的差距
reg [7:0] u_t;//补偿值
parameter K_p = 8'd10;
parameter div = 8'd3;
always @(posedge sys_clk or negedge rst_n)begin
if(!rst_n)begin
e_t <= 8'd0;
end
else if(Pid_out < target)begin
e_t <= target - Pid_out;
end
else if(Pid_out >= target)begin
e_t <= Pid_out - target;
end
else begin
e_t <= e_t;
end
end
always @(posedge sys_clk or negedge rst_n)begin
if(!rst_n)begin
u_t <= 8'd0;
end
else begin
u_t <= (e_t * K_p )>>div;
end
end
always @(posedge sys_clk or negedge rst_n)begin
if(!rst_n)begin
Pid_out <= 8'd0;
end
else if(Pid_out < target)begin
Pid_out <= Pid_out + u_t;
end
else if(Pid_out >= target)begin
Pid_out <= Pid_out - u_t;
end
end
endmoduleKp=10/8=1.25
Kp=10/16=0.625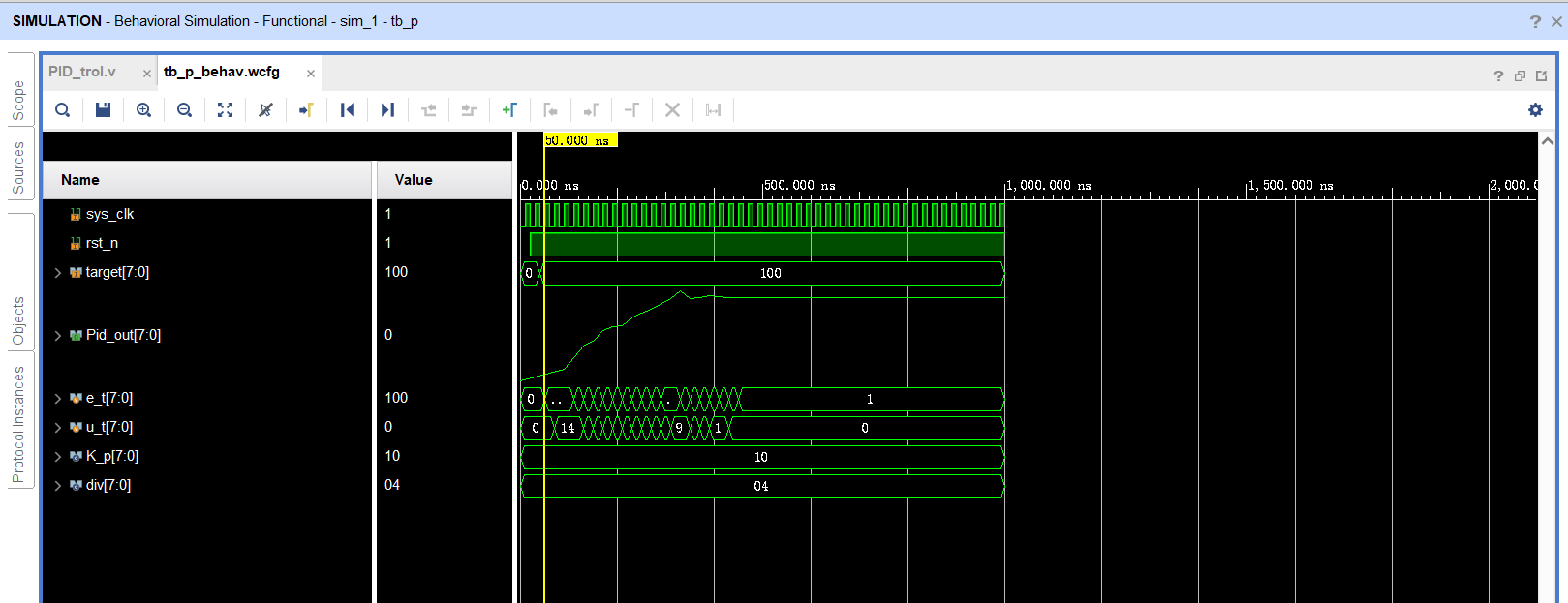
Kp=10/32=0.3125
Kp=10/64=0.157
Kp=10/128=0.0789
总结
这一篇只验证了PID中的比例系数P,其他都是0。