在Ls-dyna中进行模态分析,主要采用隐式算法进行特征值求解。
仿真流程
在Ls-Dyna下整个仿真评估流程如下:
一、模型构建
二、材料定义
三、单元算法定义
四、状态方程控制
五、属性赋予
六、连接关系设置
七、边界与载荷条件
八、求解设置
九、求解
十、结果解读
1
模型构建
模型比较简单,直接采用Prepost进行建模,最终效果如图1所示
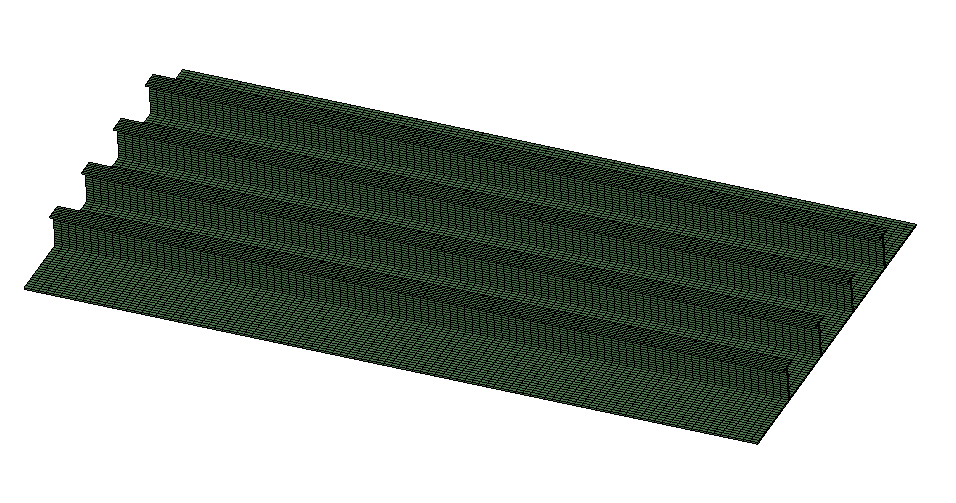
图1
2
材料定义
采用3号线弹性材料MAT_PLASTIC_KINEMATIC进行定义;具体设置如图2所示。
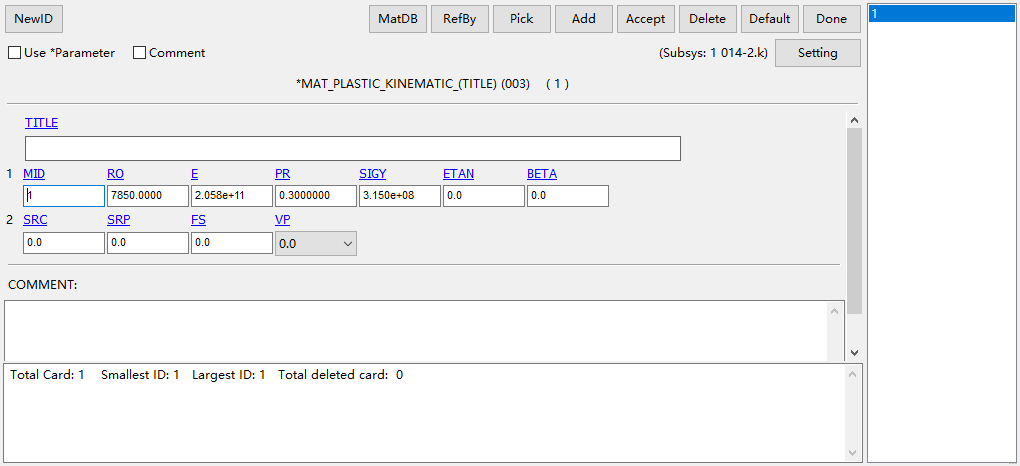
图2
3
单元算法定义
采用关键字*SECTION_SHOLID针对实体进行单元算法定义,具体设置如图3所示
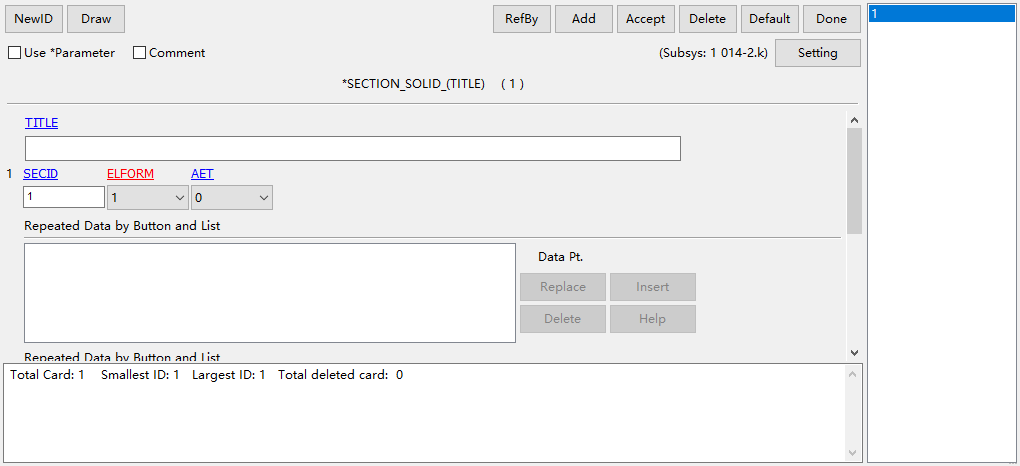
图3
4
状态方程
无状态方程;
5
属性赋予
将定义好的材料以及单元算法赋予给对应part,如图4所示;
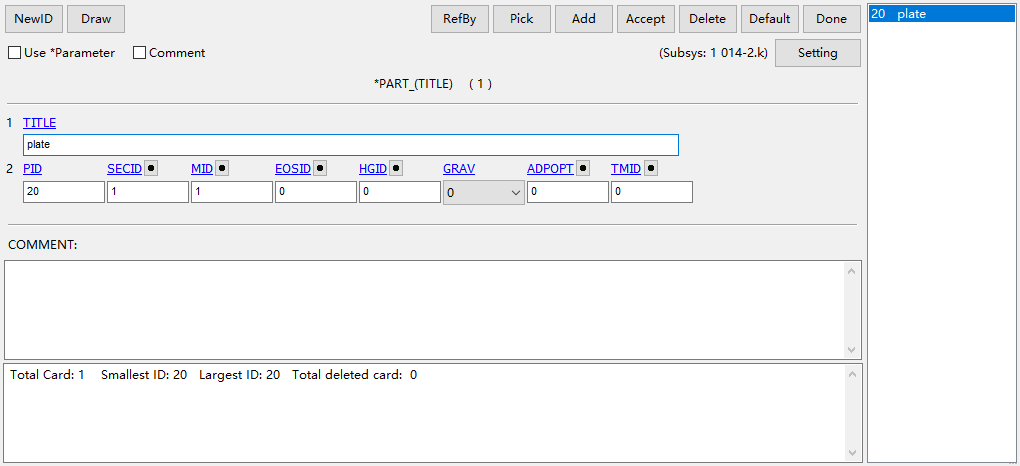
图4
6
连接关系设置
无连接关系
7
边界和载荷条件设置
求解自由模态,无需约束和加载
8
求解设置
*CONTROL_IMPLICIT_GENERAL激活内隐分析并定义相关的控制参数;
*CONTROL_IMPLICIT_DYNAMICS 激活隐式动力学评估,并进行时间积分设置;
*CONTROL_IMPLICIT_SOLUTION控制隐式求解算法
*CONTROL_IMPLICIT_SOLVER控制隐式求解器
*CONTROL_IMPLICIT_EIGENVALUE控制提取求解特征值阶数20
具体设置如图5所示
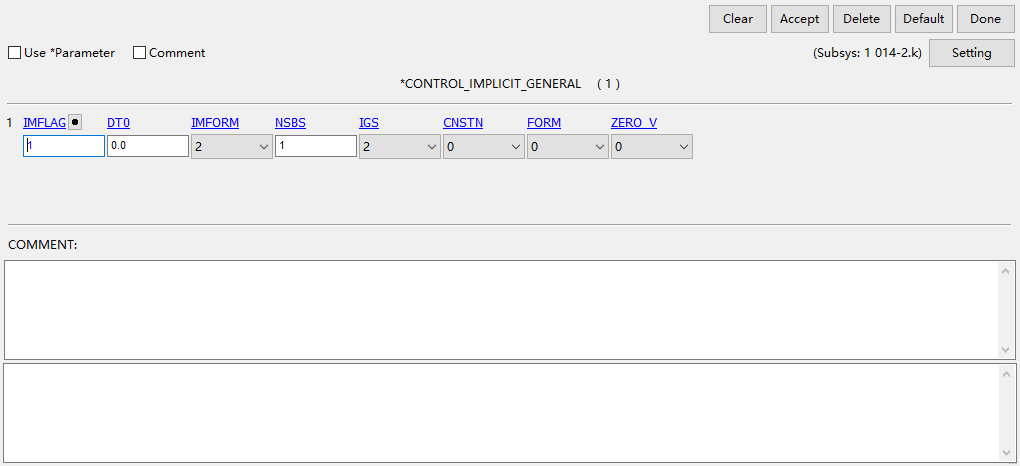
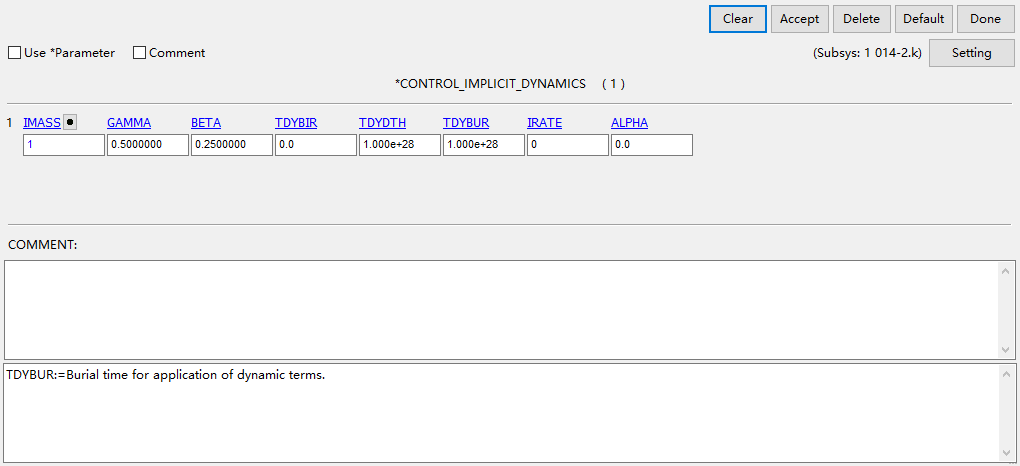
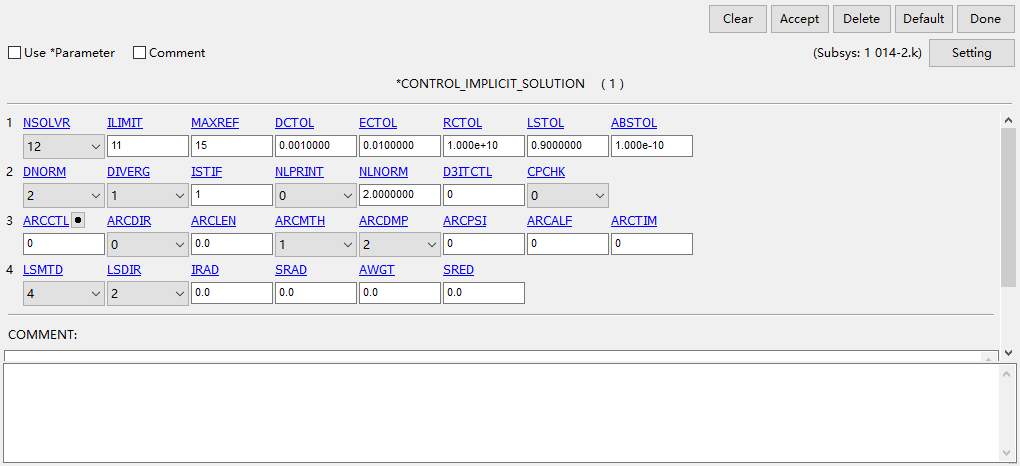
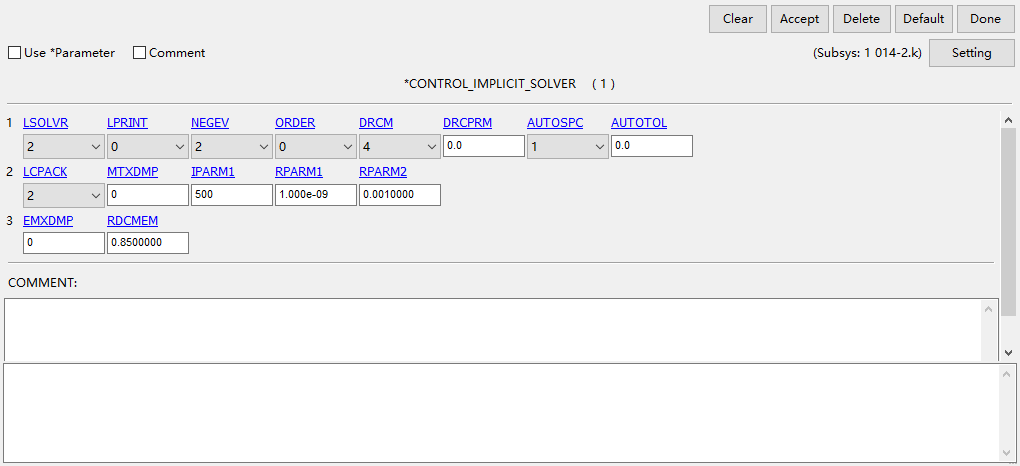
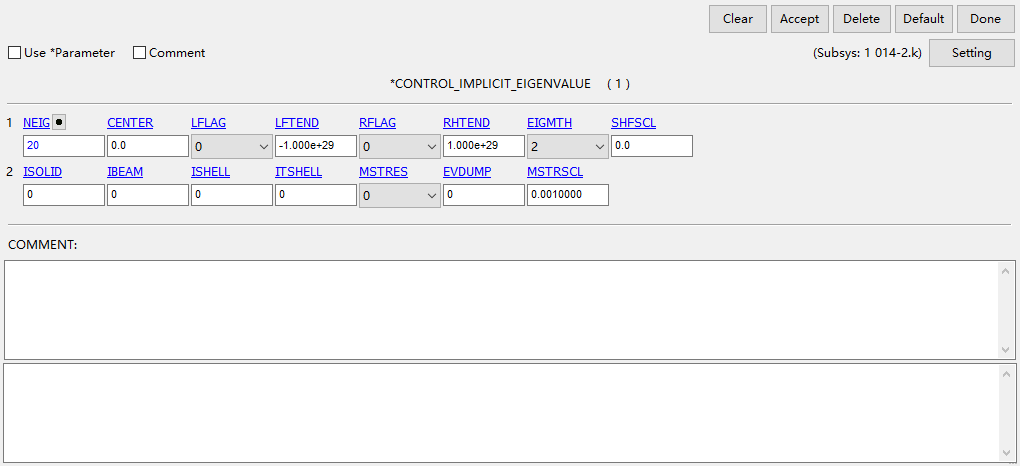
图5
9
求解
将k文件输入dyna进行求解,需要控制求解线程数和求解内存,如图6所示
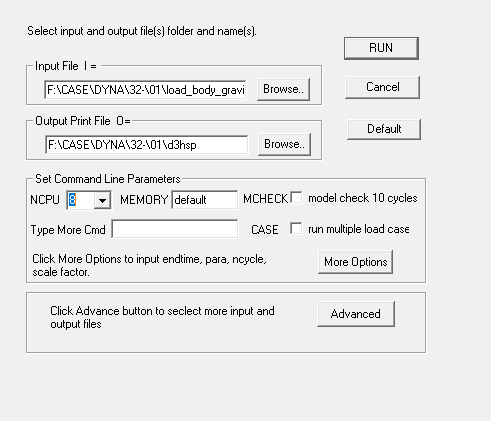
图6
10
结果解读
读取路径中d3eigv特征值文件,选取第十阶结果进行查看,如图7所示,频率值为9.517Hz。
图7