AI Keymaker:手术台上的AlphaGo:约翰霍普金斯大学发布自主手术机器人
近期,一项来自约翰霍普金斯大学(JHU)的研究,在全球AI与医疗科技领域引发了高度关注。其发布的SRT-H框架,成功地让手术机器人在无人类直接操控的情况下,100%自主完成了离体猪胆囊切除术。这一成果并非简单的技术迭代,它在更深的层面上,预示了手术机器人领域一个根本性范式转变的可能------从人作为"操作员"的时代,迈向人作为"监督者"的时代。
本文将深度剖析SRT-H的研究,探讨其演进脉络、技术核心、真实价值,以及在通往未来的道路上,它必须面对的挑战与局限。
从STAR到SRT-H:一条清晰的演进之路
要理解SRT-H的突破性,我们需要回溯到2022年。当时,同样来自JHU的STAR(智能组织自主机器人) 登上了《科学》杂志封面,它成功完成了高难度的肠道吻合术,其精确度甚至超越了人类外科医生。然而,STAR的成功建立在两个关键前提上:
- 预先标记: 手术组织上需要有特殊的荧光标记点,作为机器人定位和导航的"路标"。
- 路径僵化: 机器人遵循的是一个相对固定的、预先规划好的手术路径。
这些前提限制了其在复杂多变的真实手术环境中的应用。而本次的SRT-H,正是为了拆除这些"脚手架"而生。
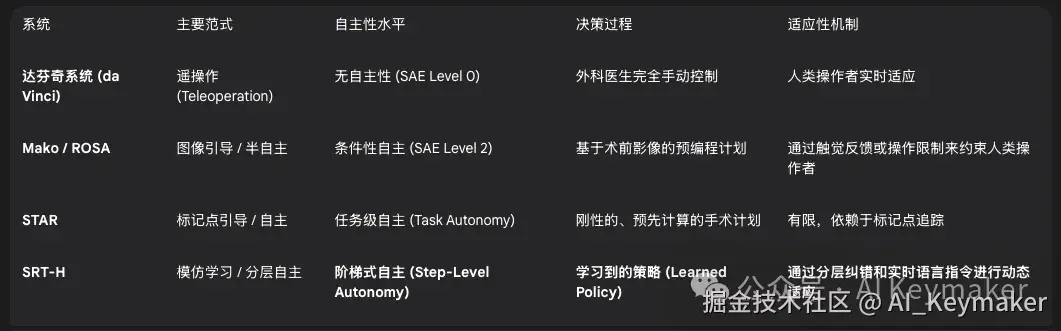
SRT-H的核心演进在于,它不再依赖任何外部标记,而是通过"眼睛"(摄像头)和"大脑"(AI模型)直接理解手术场景,并自主作出判断。这标志着从"自动化"到真正"自主化"的关键一步。
技术解码:SRT-H的双层"大脑"是如何工作的?
SRT-H的创新之处在于其精巧的分层式(Hierarchical)框架。它模仿了人类外科专家"先思考,后动手"的工作模式,将复杂的任务分解为一个高层"指挥官"和一个低层"执行官"。
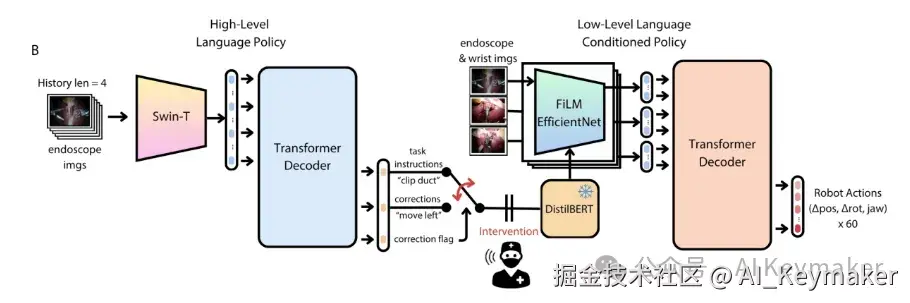
高层策略:"手术指挥官"
这一层级可被视为机器人的"大脑皮层"。它接收内窥镜的实时视频流,通过强大的视觉模型(Swin Transformer)进行分析,其核心任务是:
- 理解当前阶段: 判断手术进行到了哪一步。
- 生成下一步指令: 以自然语言的形式,生成清晰的任务指令,例如:"Grasp the fundus of the gallbladder."(抓住胆囊底部。)
- 进行错误纠正: 如果低层执行失败或偏离,高层能够发出纠正指令,例如:"Move more to the left."(再往左一点。)
这种基于语言的规划方式,极大地提升了系统的可解释性和鲁棒性。人类监督者可以清晰地看到机器人的"意图",并在必要时进行干预。
低层策略:"精英执行官"
这一层级可被视为机器人的"小脑和神经系统"。它接收来自高层的语言指令,并将其转化为精确的物理动作。其工作流程是:
- 融合多模态信息: 结合来自内窥镜和机器人腕部摄像头的视觉信息,以及高层发来的语言指令。
- 生成精确动作: 通过模仿学习,输出控制机器人手臂运动的20个维度的具体指令(包括位置、姿态、抓取力度等)。
值得注意的是,该系统通过模仿学习(Imitation Learning) 进行训练,即观看人类专家的手术录像和文字记录来学习。研究中还采用了DAgger(数据集聚合)技术,允许专家在模拟过程中对机器人的行为进行实时纠正,从而让模型在错误中学习,不断完善自身策略。
实验与结果:100%成功率背后的价值与局限
研究团队在8例离体猪胆囊上进行了胆囊切除术的自主操作实验。结果显示,SRT-H的成功率为100% ,所有关键步骤均自主完成,无需人类中途接管。这是一个令人振奋的成果,它验证了"步骤级自主性"(step-level autonomy)的可行性------即机器人能够自主完成一个完整、多步骤的外科手术子任务。
然而,我们必须冷静地看待这一成果,并认识到其现阶段的局限性:
- 理想化的实验环境: 离体实验(ex-vivo)完美规避了真实手术中的最大挑战------出血、组织粘连、不可预知的解剖变异和生命体征波动。这些是通往临床应用前必须翻越的大山。
- 速度问题: 约翰霍普金斯大学的Axel Krieger教授在采访中承认,尽管机器人在精确性和流畅性上表现优异,但其完成手术的速度目前慢于人类外科医生。
- 泛化能力的考验: 该系统目前只针对胆囊切除术这一特定任务。将其扩展到成百上千种不同的外科手术,所需的数据和训练成本将是天文数字。
"我们正在从一个僵化的、预先编程的系统,转向一个能够基于实时视觉做出判断的系统,这更像是一个人类外科医生。"
--- Axel Krieger,约翰霍普金斯大学副教授
行业影响:对"达芬奇"模式的深远挑战
SRT-H的出现,对当前由"达芬奇"机器人所主导的"主从遥操作"模式构成了长远的、根本性的挑战。虽然在短期内它无法撼动达芬奇的商业地位,但它指明了一个完全不同的技术方向。
目前的主流模式是增强医生 ,而SRT-H探索的是赋能系统。前者是更强大的工具,后者则是具备初步自主性的伙伴。这一转变将深刻影响外科手术的未来,包括外科医生的角色定义、手术室的工作流程,乃至医疗责任的法律框架。
机器人自主手术还远吗
在我看来,SRT-H最重要的贡献,并非其100%的成功率,而是它在技术上完整地回答了一个困扰业界多年的核心问题:我们能否构建一个可解释、可纠正且足够可靠的自主手术系统?
通过其精巧的分层设计和对语言的运用,JHU团队给出了一个肯定的答案。高层策略的语言指令让机器人的"心智"变得透明,这是建立人类信任的第一步,也是所有"自动驾驶"系统从实验室走向现实的关键所在。
尽管前路漫漫,从离体猪胆囊到人类手术台的距离,可能比我们想象的要远得多。但SRT-H无疑已经将手术室的大门,向一个由AI驱动的、更自主的未来,推开了一道清晰可见的缝隙。值得我们保持关注和思考的关键变量将是,实现活体(in-vivo)实验需要多久,以及整个行业如何为这场深刻的变革做好准备。