目录
[修改Makefile 文件](#修改Makefile 文件)
[修改imximage.cfg 文件](#修改imximage.cfg 文件)
[修改Kconfig 文件](#修改Kconfig 文件)
[修改MAINTAINERS 文件](#修改MAINTAINERS 文件)
[修改 U-Boot 图形界面配置文件](#修改 U-Boot 图形界面配置文件)
[编译 uboot](#编译 uboot)
[LCD 驱动修改](#LCD 驱动修改)
[网络 PHY 地址修改](#网络 PHY 地址修改)
前言
在系统移植篇10:U-Boot 移植(上),我们已经将NXP官方的U-Boot在正点原子开发板上跑起来了,能跑但存在着一些问题。所以,本讲内容是学习如何在 uboot 中添加我们的开发板或者开发平台。
移植过程
添加开发板默认配置文件
先在 configs 目录下创建默认配置文件,复制 mx6ull_14x14_evk_emmc_defconfig,然后重命名为 mx6ull_alientek_emmc_defconfig,命令如下:
cpp
cd configs
cp mx6ull_14x14_evk_emmc_defconfig mx6ull_alientek_emmc_defconfig打开文件 mx6ull_alientek_emmc_defconfig,内容如下:

将文件 mx6ull_alientek_emmc_defconfig 中的内容中,第1.4行修改成下面的:
cpp
CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/freescale/mx6ull_alientek_emmc/imximage.cfg,MX6ULL_EVK_EMMC_REWORK"
CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_TARGET_MX6ULL_ALIENTEK_EMMC=y
CONFIG_CMD_GPIO=y添加开发板对应的头文件
在 目 录 include/configs 下 添 加 I.MX6ULL-ALPHA 开发板对应的头文件 ,复制 include/configs/mx6ullevk.h,并重命名为 mx6ull_alientek_emmc.h,命令如下:
cpp
cp include/configs/mx6ullevk.h include/configs/mx6ull_alientek_emmc.h打开mx6ull_alientek_emmc.h文件,可见:

将这个条件编译修改为以下:
cpp
#ifndef __MX6ULL_ALIENTEK_EMMC_CONFIG_H
#define __MX6ULL_ALIENTEK_EMMC_CONFIG_Hmx6ull_alientek_emmc.h 里面有很多宏定义。
主要包含:
-
基础配置 - CPU信息显示、内存分配、板级初始化等
-
存储接口配置 - MMC/SD、NAND Flash、QSPI Flash
-
外设配置 - UART、I2C、USB、以太网等
-
启动环境设置 - 环境变量、启动参数、生产模式设置
-
特殊功能 - 视频显示、温度监测、Android支持等
如果我们自己要想使能或者禁止 uboot 的某些功能,那就在mx6ull_alientek_emmc.h 里面做修改即可。
cpp
/*
* Copyright (C) 2016 Freescale Semiconductor, Inc.
* Configuration settings for the Freescale i.MX6UL 14x14 EVK board.
* SPDX-License-Identifier: GPL-2.0+
*/
#ifndef __MX6ULL_ALIENTEK_EMMC_CONFIG_H
#define __MX6ULL_ALIENTEK_EMMC_CONFIG_H
/* 头文件包含说明:
* mx6_common.h包含i.MX6系列通用配置,如果当前文件中未找到某些配置,
* 可能定义在mx6_common.h中
*/
#include <asm/arch/imx-regs.h>
#include <linux/sizes.h>
#include "mx6_common.h"
#include <asm/imx-common/gpio.h>
/* 内存配置说明:
* 9x9 EVK开发板使用256MB DRAM,正点原子I.MX6U-ALPHA开发板使用512MB DDR3
* 通过CONFIG_TARGET_MX6ULL_9X9_EVK宏区分不同开发板
*/
#ifdef CONFIG_TARGET_MX6ULL_9X9_EVK
#define PHYS_SDRAM_SIZE SZ_256M // 9x9 EVK开发板DRAM大小
#define CONFIG_BOOTARGS_CMA_SIZE "cma=96M "
#else
#define PHYS_SDRAM_SIZE SZ_512M // 默认DRAM大小(14x14 EVK或正点原子开发板)
#define CONFIG_BOOTARGS_CMA_SIZE ""
#undef CONFIG_LDO_BYPASS_CHECK // 14x14 EVK使用DCDC,不需要PMIC旁路检查
#endif
/* 基础功能配置 */
#define CONFIG_ENV_VARS_UBOOT_RUNTIME_CONFIG
#define CONFIG_DISPLAY_CPUINFO // 启动时输出CPU信息
#define CONFIG_DISPLAY_BOARDINFO // 启动时输出板级信息
#define CONFIG_SYS_MALLOC_LEN (16 * SZ_1M) // 内存池大小16MB
#define CONFIG_BOARD_EARLY_INIT_F // 使能board_early_init_f函数
#define CONFIG_BOARD_LATE_INIT // 使能board_late_init函数
/* 串口配置说明:
* 使用UART1作为控制台,基地址为0x02020000
* 寄存器定义见arch/arm/include/asm/arch-mx6/imx-regs.h
*/
#define CONFIG_MXC_UART
#define CONFIG_MXC_UART_BASE UART1_BASE
/* 存储接口配置 */
#ifdef CONFIG_FSL_USDHC
#define CONFIG_SYS_FSL_ESDHC_ADDR USDHC2_BASE_ADDR // EMMC控制器基地址
/* NAND与USDHC2引脚冲突处理 */
#ifdef CONFIG_SYS_USE_NAND
#define CONFIG_SYS_FSL_USDHC_NUM 1 // 使用NAND时只有1个USDHC
#else
#define CONFIG_SYS_FSL_USDHC_NUM 2 // 默认有2个USDHC(EMMC+SD卡)
#endif
#endif
/* I2C配置说明:
* 使能I2C1和I2C2,速度100kHz
* 9x9 EVK使用PFUZE3000电源管理IC,地址0x08
*/
#define CONFIG_CMD_I2C
#ifdef CONFIG_CMD_I2C
#define CONFIG_SYS_I2C
#define CONFIG_SYS_I2C_MXC
#define CONFIG_SYS_I2C_MXC_I2C1 // 使能I2C1
#define CONFIG_SYS_I2C_MXC_I2C2 // 使能I2C2
#define CONFIG_SYS_I2C_SPEED 100000
/* 仅9X9 EVK需要PMIC配置 */
#define CONFIG_POWER
#define CONFIG_POWER_I2C
#define CONFIG_POWER_PFUZE3000
#define CONFIG_POWER_PFUZE3000_I2C_ADDR 0x08
#endif
/* 环境变量存储配置 */
#define CONFIG_SYS_MMC_IMG_LOAD_PART 1 // 从MMC分区1加载镜像
/* NAND分区设置 */
#ifdef CONFIG_SYS_BOOT_NAND
#define CONFIG_MFG_NAND_PARTITION "mtdparts=gpmi-nand:64m(boot),16m(kernel),16m(dtb),1m(misc),-(rootfs) "
#else
#define CONFIG_MFG_NAND_PARTITION ""
#endif
/* 生产模式环境设置 */
#define CONFIG_MFG_ENV_SETTINGS \
"mfgtool_args=setenv bootargs console=${console},${baudrate} " \
CONFIG_BOOTARGS_CMA_SIZE \
"rdinit=/linuxrc " \
"g_mass_storage.stall=0 g_mass_storage.removable=1 " \
"g_mass_storage.file=/fat g_mass_storage.ro=1 " \
"g_mass_storage.idVendor=0x066F g_mass_storage.idProduct=0x37FF "\
"g_mass_storage.iSerialNumber=\"\" "\
CONFIG_MFG_NAND_PARTITION \
"clk_ignore_unused "\
"\0" \
"initrd_addr=0x83800000\0" \
"initrd_high=0xffffffff\0" \
"bootcmd_mfg=run mfgtool_args;bootz ${loadaddr} ${initrd_addr} ${fdt_addr};\0"
/* 启动配置(完整定义见原始文件) */
#if defined(CONFIG_SYS_BOOT_NAND)
// NAND启动配置...
#else
// MMC/SD卡启动配置...
#endif
/* 内存测试配置 */
#define CONFIG_CMD_MEMTEST
#define CONFIG_SYS_MEMTEST_START 0x80000000
#define CONFIG_SYS_MEMTEST_END (CONFIG_SYS_MEMTEST_START + 0x8000000)
/* 内存映射配置 */
#define CONFIG_NR_DRAM_BANKS 1 // DRAM BANK数量
#define PHYS_SDRAM MMDC0_ARB_BASE_ADDR // DRAM起始地址0x80000000
#define CONFIG_SYS_SDRAM_BASE PHYS_SDRAM
#define CONFIG_SYS_INIT_RAM_ADDR IRAM_BASE_ADDR // OCRAM起始地址0x00900000
#define CONFIG_SYS_INIT_RAM_SIZE IRAM_SIZE // OCRAM大小128KB
/* 栈指针设置 */
#define CONFIG_SYS_INIT_SP_OFFSET \
(CONFIG_SYS_INIT_RAM_SIZE - GENERATED_GBL_DATA_SIZE)
#define CONFIG_SYS_INIT_SP_ADDR \
(CONFIG_SYS_INIT_RAM_ADDR + CONFIG_SYS_INIT_SP_OFFSET)
/* MMC环境配置 */
#define CONFIG_SYS_MMC_ENV_DEV 1 // 默认MMC设备(USDHC2/EMMC)
#define CONFIG_SYS_MMC_ENV_PART 0 // 默认使用第0分区
#define CONFIG_MMCROOT "/dev/mmcblk1p2" // 根文件系统分区
/* QSPI Flash配置 */
#ifdef CONFIG_FSL_QSPI
#define CONFIG_QSPI_BASE QSPI0_BASE_ADDR
#define CONFIG_QSPI_MEMMAP_BASE QSPI0_AMBA_BASE
#define CONFIG_SF_DEFAULT_BUS 0
#define CONFIG_SF_DEFAULT_CS 0
#define CONFIG_SF_DEFAULT_SPEED 40000000
#define CONFIG_SF_DEFAULT_MODE SPI_MODE_0
#endif
/* NAND配置 */
#ifdef CONFIG_SYS_USE_NAND
#define CONFIG_CMD_NAND
#define CONFIG_NAND_MXS
#define CONFIG_SYS_MAX_NAND_DEVICE 1
#define CONFIG_SYS_NAND_BASE 0x40000000
#endif
/* 环境变量存储位置 */
#define CONFIG_ENV_SIZE SZ_8K
#if defined(CONFIG_ENV_IS_IN_MMC)
#define CONFIG_ENV_OFFSET (12 * SZ_64K) // EMMC环境变量偏移
#elif defined(CONFIG_ENV_IS_IN_SPI_FLASH)
#define CONFIG_ENV_OFFSET (768 * 1024) // SPI Flash偏移
#elif defined(CONFIG_ENV_IS_IN_NAND)
#define CONFIG_ENV_OFFSET (60 << 20) // NAND偏移60MB
#define CONFIG_ENV_SIZE (128 << 10) // NAND环境大小128KB
#endif
/* 网络配置说明:
* ENET1 PHY地址0x2,ENET2 PHY地址0x1
* 正点原子开发板两个PHY均使用RMII接口
*/
#define CONFIG_FEC_ENET_DEV 1 // 默认使用ENET2
#if (CONFIG_FEC_ENET_DEV == 0)
#define IMX_FEC_BASE ENET_BASE_ADDR
#define CONFIG_FEC_MXC_PHYADDR 0x2
#elif (CONFIG_FEC_ENET_DEV == 1)
#define IMX_FEC_BASE ENET2_BASE_ADDR
#define CONFIG_FEC_MXC_PHYADDR 0x1
#endif
/* 显示配置 */
#define CONFIG_VIDEO
#define CONFIG_VIDEO_LOGO // 使能LOGO显示
#define CONFIG_CMD_BMP // 使能BMP图片显示命令
#endif /* __MX6ULL_ALIENTEK_EMMC_CONFIG_H */添加开发板对应的板级文件夹
uboot 中每个板子都有一个对应的文件夹来存放板级文件,NXP 官方 I.MX6ULL EVK 开发板的板级文件夹存放在 board/freescale/mx6ullevk 。
复制 mx6ullevk,将其重命名为 mx6ull_alientek_emmc,命令如下:
cpp
cd board/freescale/
cp mx6ullevk/ -r mx6ull_alientek_emmc进 入 mx6ull_alientek_emmc 目 录 中 , 将 其 中 的 mx6ullevk.c 文 件 重 命 名 为mx6ull_alientek_emmc.c,命令如下:
cpp
cd mx6ull_alientek_emmc
mv mx6ullevk.c mx6ull_alientek_emmc.c对 mx6ull_alientek_emmc 目录下的文件做一些修改:
修改Makefile 文件
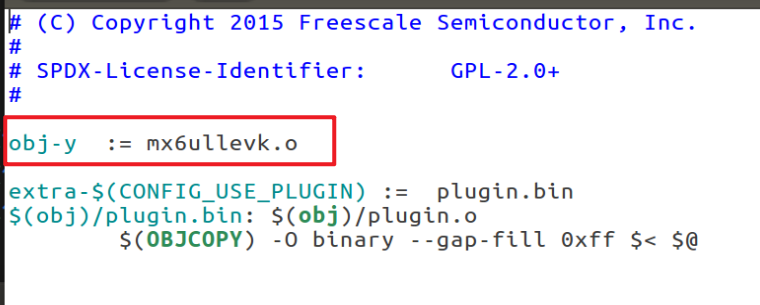
将上图标红的obj-y,改为 mx6ull_alientek_emmc.o,这样才会编译 mx6ull_alientek_emmc.c这个文件。
cpp
obj-y := mx6ull_alientek_emmc.o修改imximage.cfg 文件
修改 mx6ull_alientek_emmc 目录下的 imximage.cfg 文件:
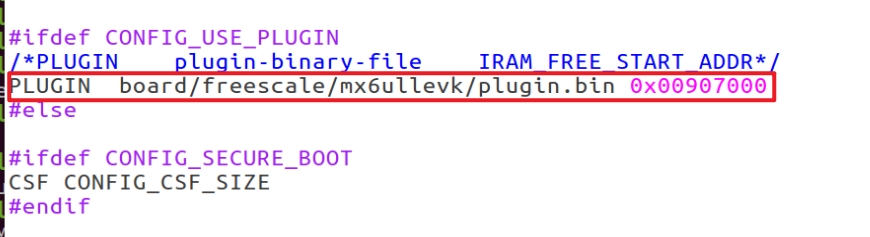
将上图标红的代码修改为以下:
cpp
PLUGIN board/freescale/mx6ull_alientek_emmc /plugin.bin 0x00907000修改Kconfig 文件
修改 mx6ull_alientek_emmc 目录下的 Kconfig 文件:
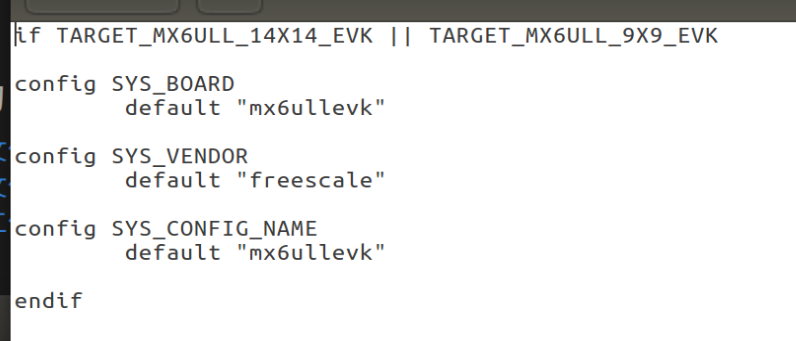
全部内容修改为以下:
cpp
if TARGET_MX6ULL_ALIENTEK_EMMC
config SYS_BOARD
default "mx6ull_alientek_emmc"
config SYS_VENDOR
default "freescale"
config SYS_SOC
default "mx6"
config SYS_CONFIG_NAME
default "mx6ull_alientek_emmc"
endif修改MAINTAINERS 文件
修改 mx6ull_alientek_emmc 目录下的 MAINTAINERS 文件:
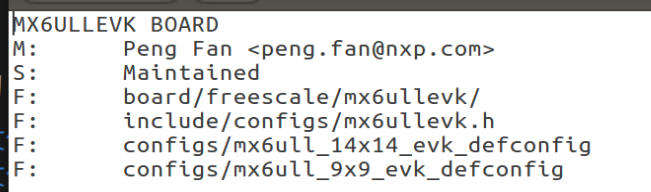
全部内容修改为如下:
cpp
MX6ULL_ALIENTEK_EMMC BOARD
M: Peng Fan <peng.fan@nxp.com>
S: Maintained
F: board/freescale/mx6ull_alientek_emmc/
F: include/configs/mx6ull_alientek_emmc.h修改 U-Boot 图形界面配置文件
修改文件arch/arm/cpu/armv7/mx6/Kconfig,在 207 行左右加入如下内容:
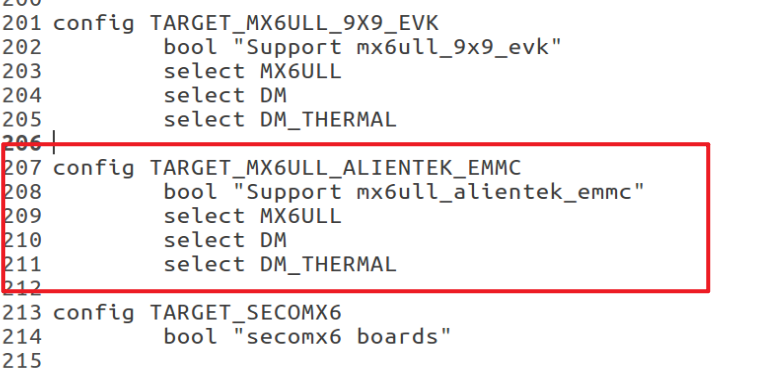
代码如下:
cpp
config TARGET_MX6ULL_ALIENTEK_EMMC
bool "Support mx6ull_alientek_emmc"
select MX6ULL
select DM
select DM_THERMAL在最后一行的 endif 的前一行添加如下内容:

代码如下:
cpp
source "board/freescale/mx6ull_alientek_emmc/Kconfig"到此为止, I.MX6U-ALPHA 开发板就已经添加到 uboot 中了,接下来就是编译这个新添加的开发板。
编译 uboot
使用新添加的板子配置编译 uboot,在 uboot 根目录下新建一个名为 mx6ull_alientek_emmc.sh 的 shell 脚本,脚本内容如下:
cpp
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_alientek_emmc_defconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j16给予 mx6ll_alientek_emmc.sh 可执行权限,然后运行脚本来完成编译,命令如下:
cpp
chmod 777 mx6ull_alientek_emmc.sh //给予可执行权限,一次即可
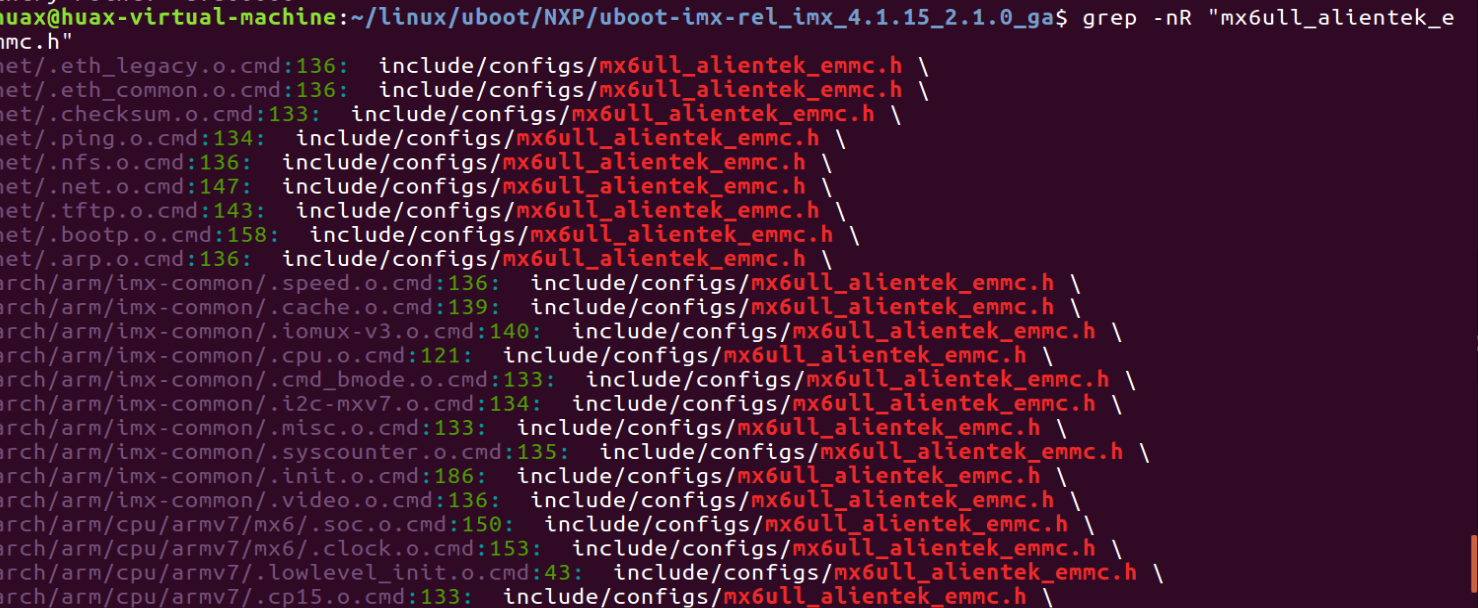
./mx6ull_alientek_emmc.sh //运行脚本编译 uboot等待编译完成 , 编译完成以后输入如下命令, 查看添加的mx6ull_alientek_emmc.h 这个头文件有没有被引用。
cpp
grep -nR "mx6ull_alientek_emmc.h"如果有很多文件都引用了mx6ull_alientek_emmc.h这个头文件,那就说明新板子添加成功:
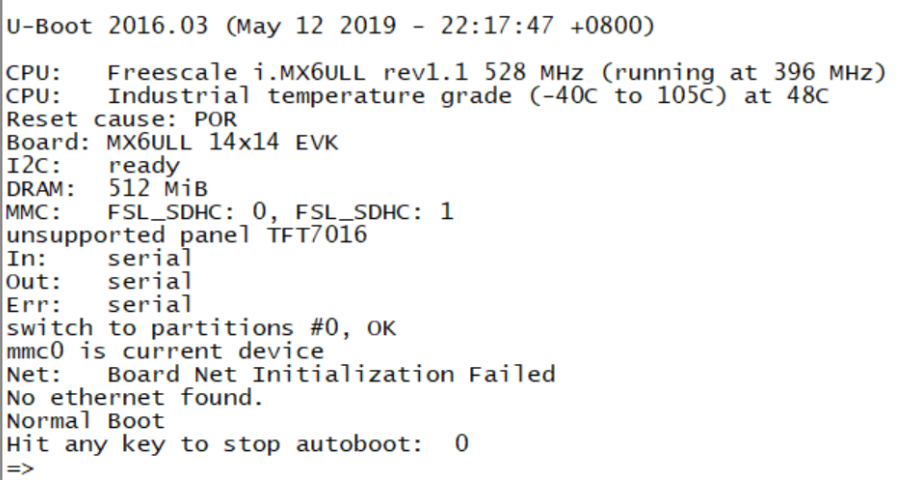
编译完成以后就使用 imxdownload 将新编译出来的 u-boot.bin 烧写到 SD 卡中测试, SecureCRT 输出结果如图:
LCD 驱动修改
一般修改 LCD 驱动重点注意以下几点:
- LCD 所使用的 GPIO,查看 uboot 中 LCD 的 IO 配置是否正确。
- LCD 背光引脚 GPIO 的配置。
- LCD 配置参数是否正确。
虽然笔者太穷了没有购买LCD,但是都学到这里了,还是做一些笔记(万一以后有钱了呢~)。
修改源文件
在board/freescale/mx6ull_alientek_emmc/路径下,打开文件 mx6ull_alientek_emmc.c,找到如下内容:
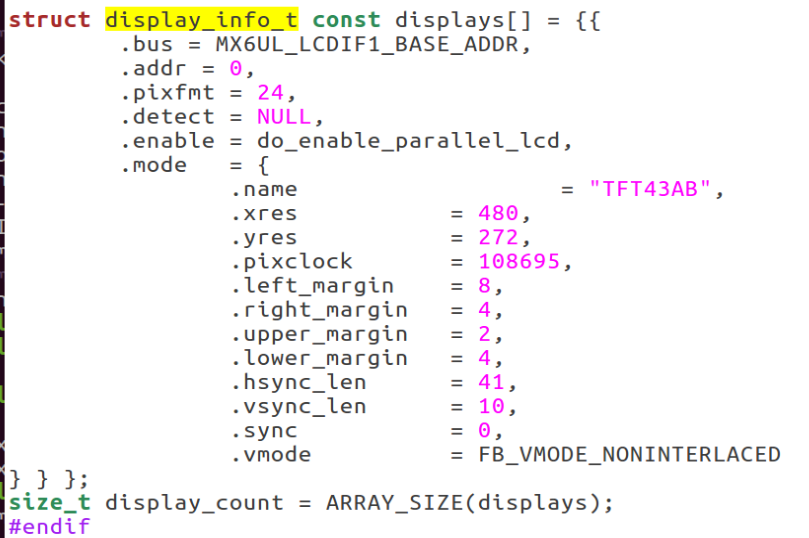
将这段代码替换为以下:
cpp
struct display_info_t const displays[] = {{
.bus = MX6UL_LCDIF1_BASE_ADDR,
.addr = 0,
.pixfmt = 24,
.detect = NULL,
.enable = do_enable_parallel_lcd,
.mode = {
.name = "TFT7016",
.xres = 1024,
.yres = 600,
.pixclock = 19531,
.left_margin = 140, //HBPD
.right_margin = 160, //HFPD
.upper_margin = 20, //VBPD
.lower_margin = 12, //VFBD
.hsync_len = 20, //HSPW
.vsync_len = 3, //VSPW
.sync = 0,
.vmode = FB_VMODE_NONINTERLACED
} } };修改头文件
修改include/configs/路径下的mx6ull_alientek_emmc.h文件,
将所有 panel=TFT43AB 修改为:
cpp
panel=TFT7016修改完成以后重新编译一遍 uboot 并烧写到 SD 中启动,重启以后 LCD 驱动一般就会工作正常。
修改环境变量
在 uboot 命令模式输入"print"来查看环境变量 panel 的值:
如果 EMMC 中的环境变量 panel 不等于 TFT7016,那么 LCD 显示肯定不正常,我们只需要在uboot 中修改 panel 的值为 TFT7016 即可,在 uboot 的命令模式下输入如下命令:
cpp
setenv panel TFT7016
saveenv保存,重启 uboot,再看LCD是否工作正常。
网络驱动修改
网络原理图
I.MX6U-ALPHA 开发板 ENET1 的网络原理图如图:
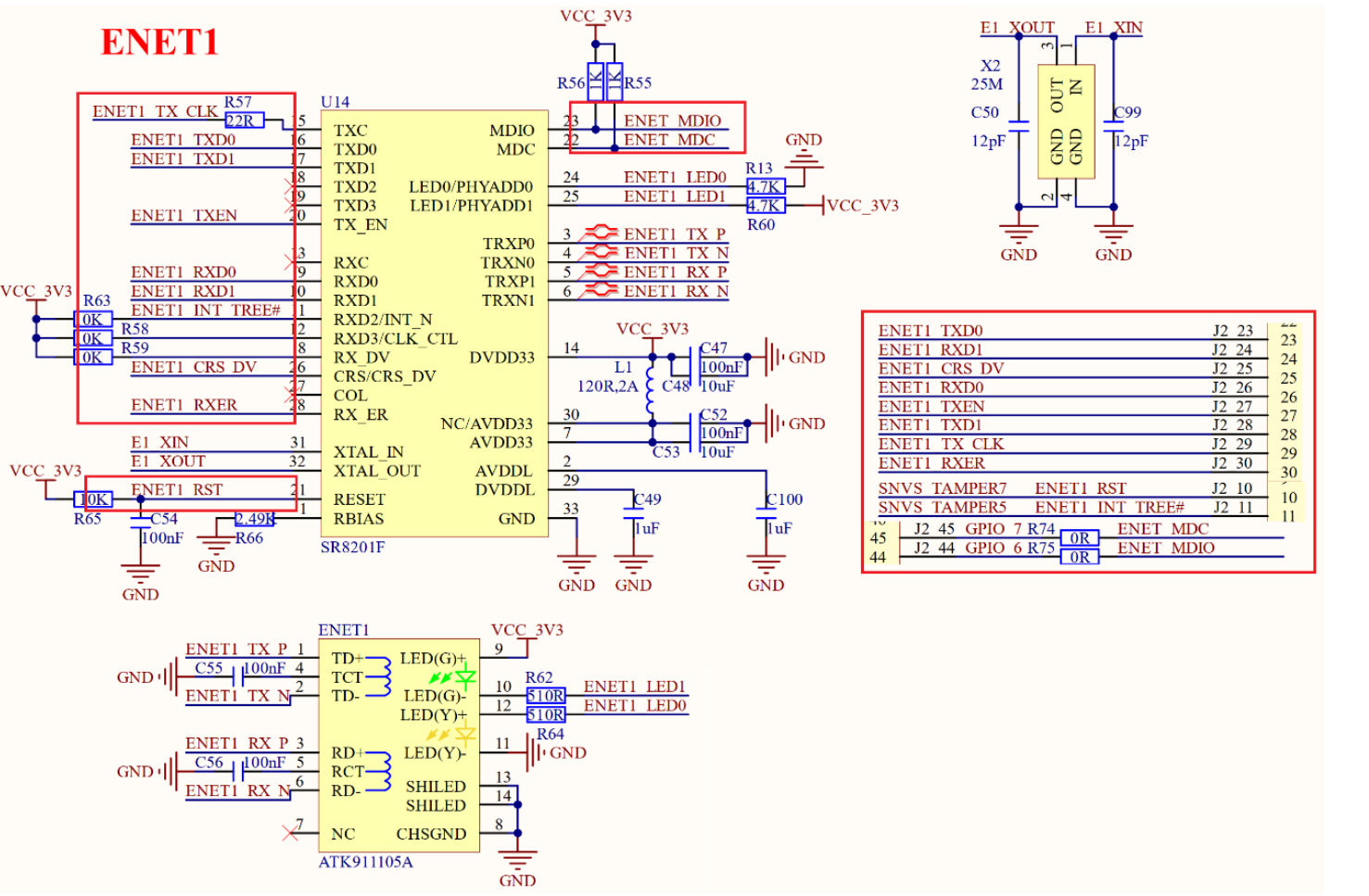
ENET1 的网络 PHY芯片为 SR8201F(器件地址为 0X2),通过 RMII 接口与 I.MX6ULL 相连,复位引脚ENET1_RST接到了 I.M6ULL 的 SNVS_TAMPER7 这个引脚上。
要修改 ENET1 网络驱动的话重点就三点:
- ENET1 复位引脚初始化。
- SR8201F 的器件 ID
- SR8201F 驱动
再来看一下 ENET2 的原理图,如图:
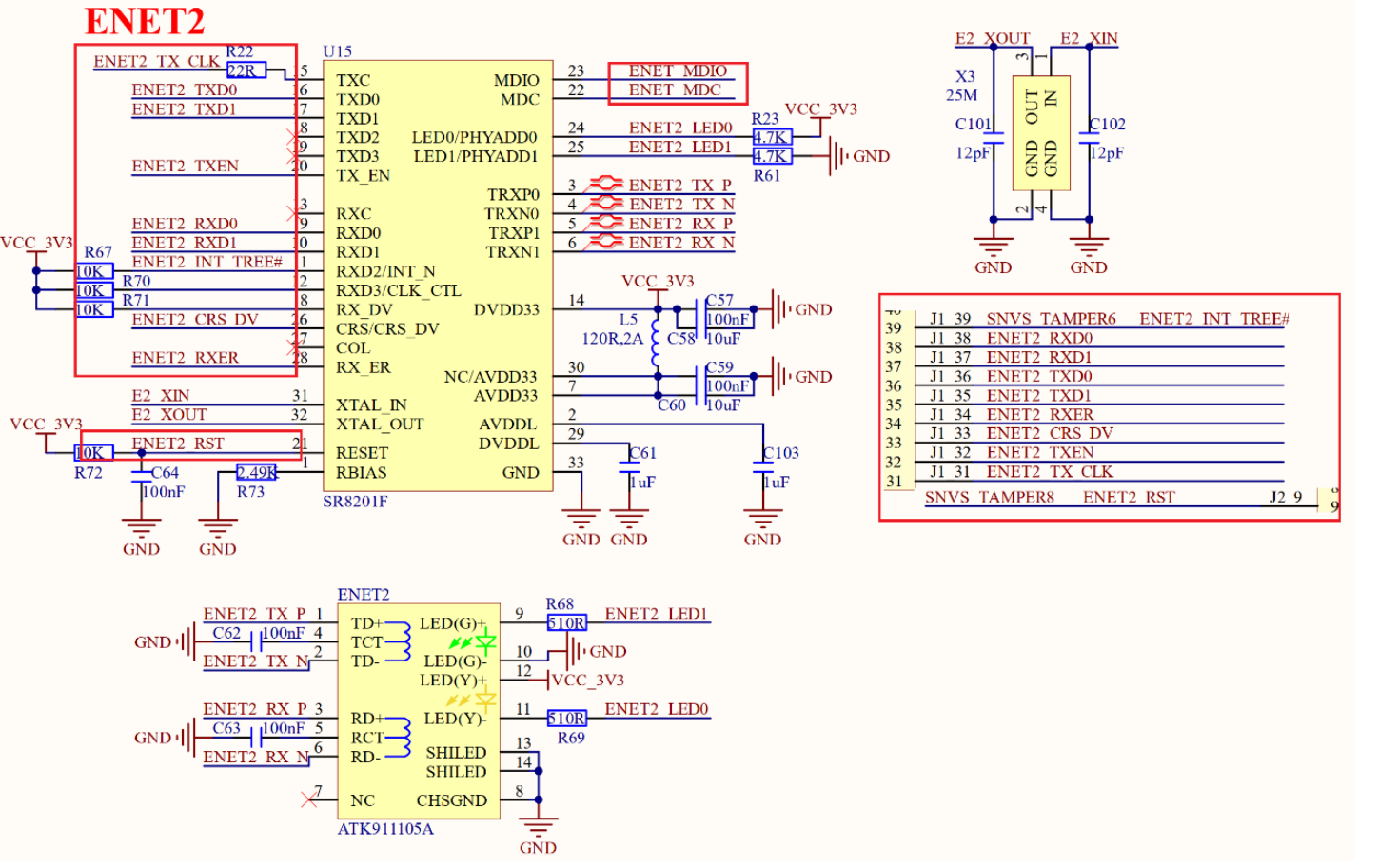
ENET2 网络驱动的修改注意点如下:
- ENET2 的复位引脚,ENET2_RST 接到了I.MX6ULL 的 SNVS_TAMPER8 上。
- ENET2 所使用的 PHY 芯片器件地址为 0X1。
- SR8201F 驱动
网络 PHY 地址修改
首先修改 uboot 中的 ENET1 和 ENET2 的 PHY 地址和驱动,打开include/configs/路径下的mx6ull_alientek_emmc.h文件。
网络相关驱动代码如下:
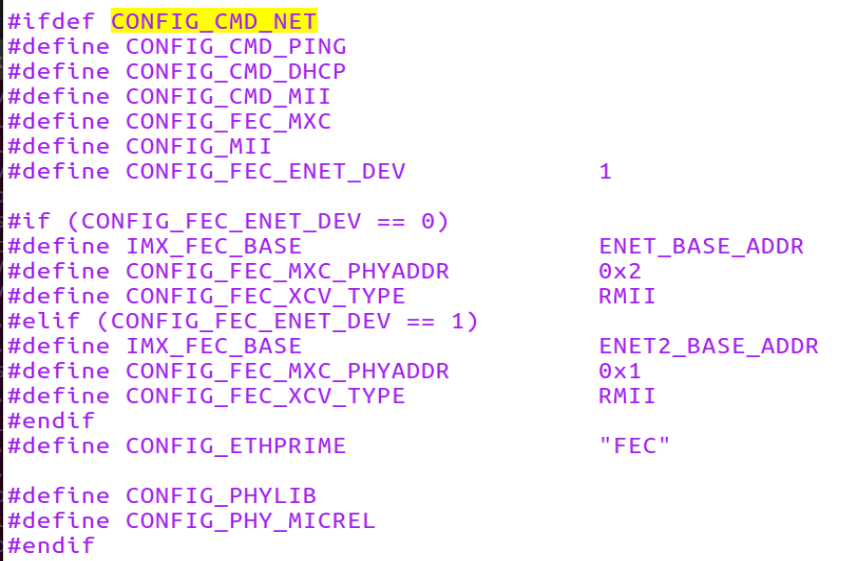
上述代码理论上有三处要修改:
- 修改 ENET1 网络 PHY 的地址。
- 修改 ENET2 网络 PHY 的地址。
- 使能 REALTEK 公司的 PHY 驱动。
前面我们分析过:正点原子开发板的ENET1 的 PHY 地址默认是 0X2, ENET2 的 PHY 地址默认为 0x1。所有代码里phy地址不需要修改了。
使能phy驱动是通过宏,将CONFIG_PHY_MICREL替换为**#define CONFIG_PHY_REALTEK。**
修改后的代码如下:
cpp
#ifdef CONFIG_CMD_NET // 如果启用网络功能
#define CONFIG_CMD_PING // 启用ping命令
#define CONFIG_CMD_DHCP // 启用DHCP自动获取IP功能
#define CONFIG_CMD_MII // 启用MII管理命令(用于PHY寄存器调试)
#define CONFIG_FEC_MXC // 启用飞思卡尔以太网控制器驱动
#define CONFIG_MII // 启用标准MII接口支持
#define CONFIG_FEC_ENET_DEV 1 // 默认使用ENET2网口(0=ENET1,1=ENET2)
/* 网口1(ENET1)配置 */
#if (CONFIG_FEC_ENET_DEV == 0)
#define IMX_FEC_BASE ENET_BASE_ADDR // ENET1寄存器基地址
#define CONFIG_FEC_MXC_PHYADDR 0x2 // ENET1的PHY地址(原理图决定)
#define CONFIG_FEC_XCV_TYPE RMII // 接口类型为RMII
/* 网口2(ENET2)配置 */
#elif (CONFIG_FEC_ENET_DEV == 1)
#define IMX_FEC_BASE ENET2_BASE_ADDR // ENET2寄存器基地址
#define CONFIG_FEC_MXC_PHYADDR 0x1 // ENET2的PHY地址(原理图决定)
#define CONFIG_FEC_XCV_TYPE RMII // 接口类型为RMII
#endif
#define CONFIG_ETHPRIME "FEC" // 默认网口名称
/* PHY芯片驱动配置 */
#define CONFIG_PHYLIB // 启用通用PHY库
#define CONFIG_PHY_REALTEK // 使用对应公司的PHY驱动(如SR8201F)
#endif删除原网络驱动
我们使用的phy芯片和NXP官方uboot里用到的不一致,所有没必要保留这部分驱动,也就是要删除 uboot 中 74LV595 的驱动代码,,并且修改网络复位引脚的驱动。
在board/freescale/mx6ull_alientek_emmc/路径下,打开文件 mx6ull_alientek_emmc.c,找到如下内容:
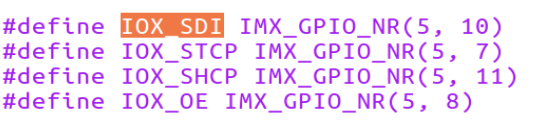
将上图中74LV595 的相关 GPIO删除。用以下代码替代:
cpp
#define ENET1_RESET IMX_GPIO_NR(5, 7)
#define ENET2_RESET IMX_GPIO_NR(5, 8)ENET1 的复位引脚连接到 SNVS_TAMPER7 上,对应 GPIO5_IO07, ENET2 的复位引脚连接到 SNVS_TAMPER8 上,对应 GPIO5_IO08。
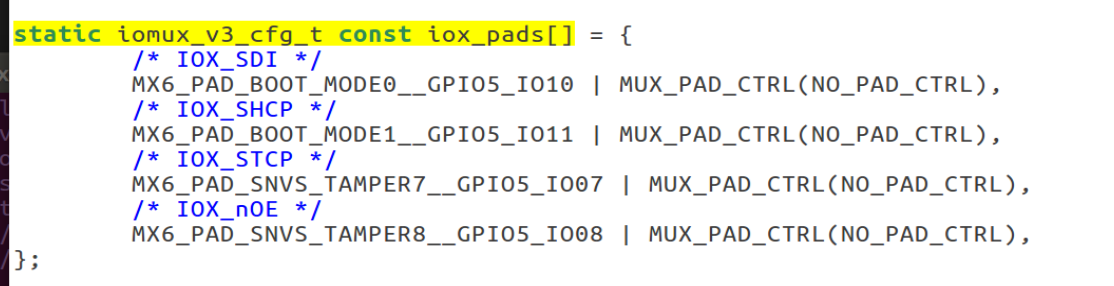
在文件 mx6ull_alientek_emmc.c中,删除74LV595 的 IO 配置参数结构体:
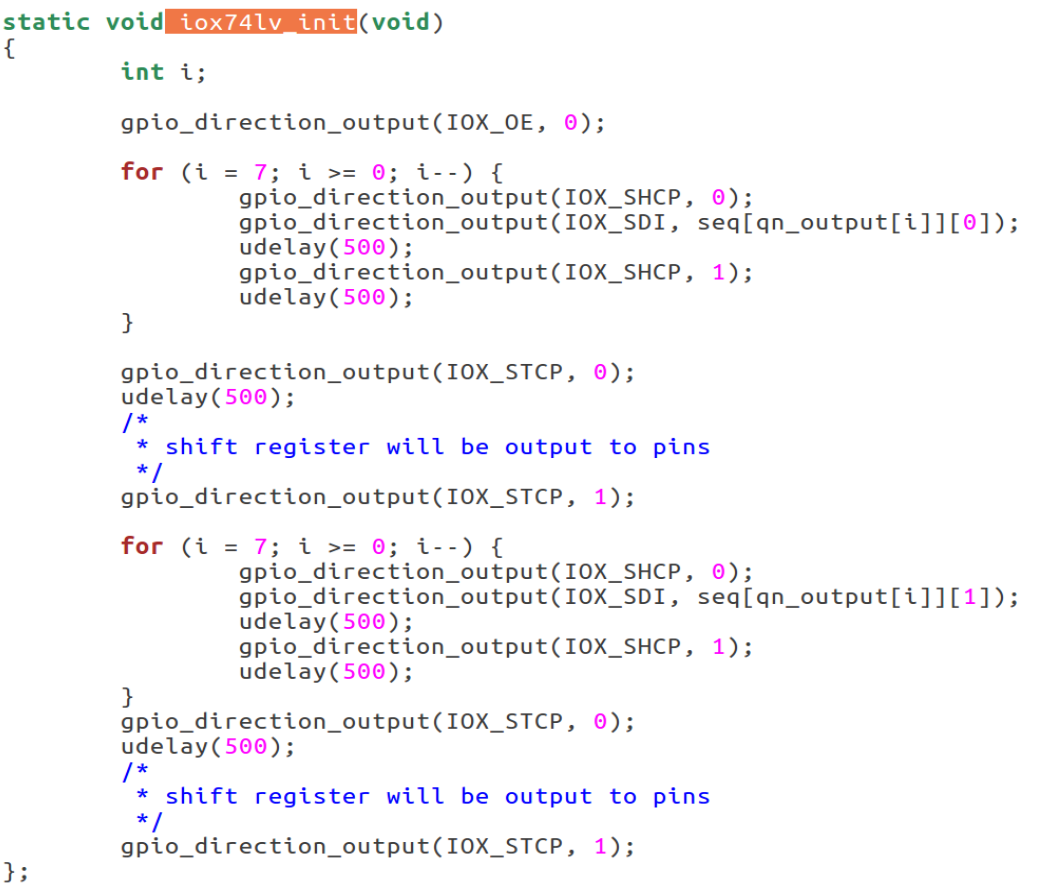
在文件 mx6ull_alientek_emmc.c中,删除函数 iox74lv_init:
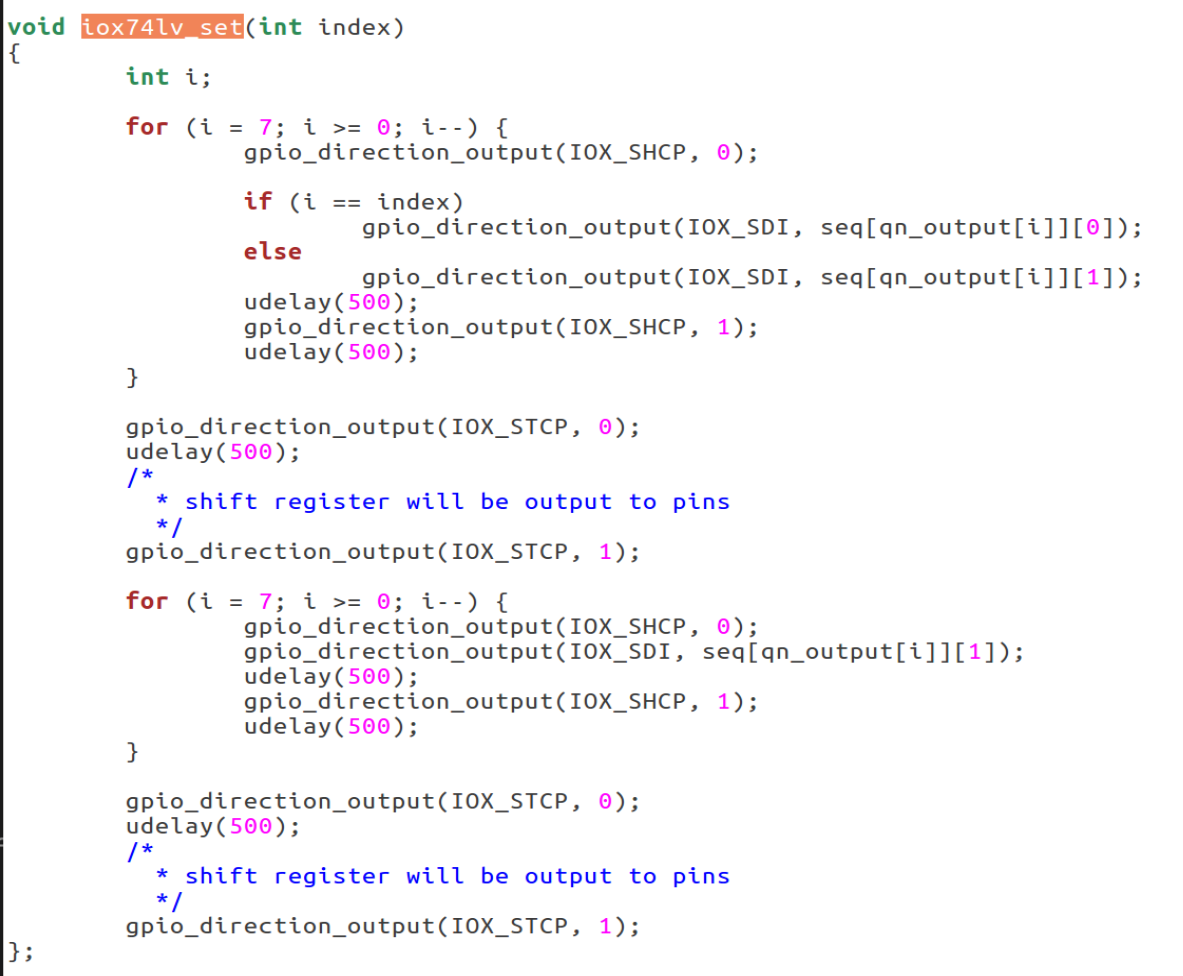
在文件 mx6ull_alientek_emmc.c中,删除函数iox74lv_set:
在 mx6ull_alientek_emmc.c 中找到 board_init 函数,此函数是板子初始化函数,会被board_init_r 调用。board_init 会调用 imx_iomux_v3_setup_multiple_pads 和 iox74lv_init 这两个函数来初始化74lv595 的 GPIO,将这两行删除掉。
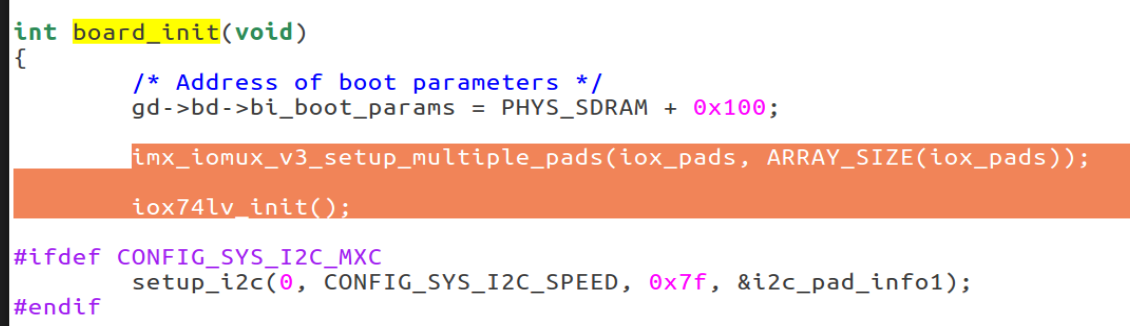
至此, mx6ull_alientek_emmc.c 中关于 74LV595 芯片的驱动代码都删除掉了,接下来就是添加 I.MX6U-ALPHA 开发板两个网络复位引脚了。
网络复位引脚驱动
在board/freescale/mx6ull_alientek_emmc/路径下,打开文件 mx6ull_alientek_emmc.c,找到如下内容:
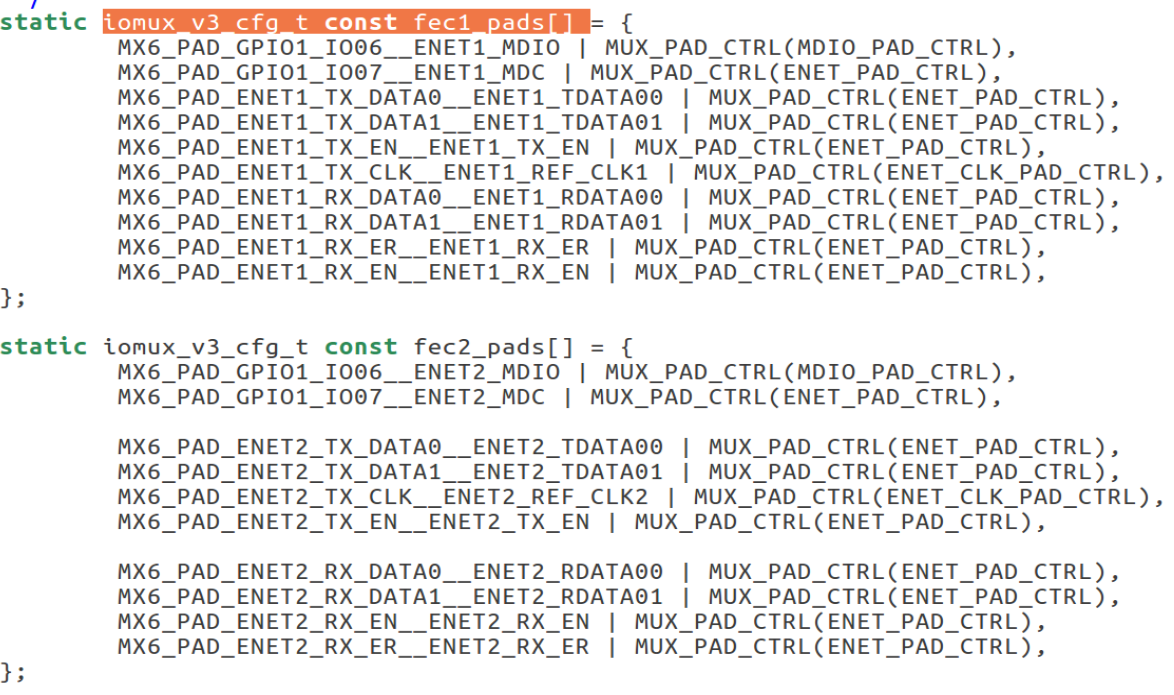
结构体数组 fec1_pads 和 fec2_pads 是 ENET1 和 ENET2 这两个网口的 IO 配置参数,在这两个数组中分别添加两个网口的复位 IO 配置参数:
fec1中最后一行加上:
cpp
MX6_PAD_SNVS_TAMPER7__GPIO5_IO07 | MUX_PAD_CTRL(NO_PAD_CTRL),fec2中最后一行加上:
cpp
MX6_PAD_SNVS_TAMPER8__GPIO5_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL),继续在文件 mx6ull_alientek_emmc.c 中找到函数 setup_iomux_fec:
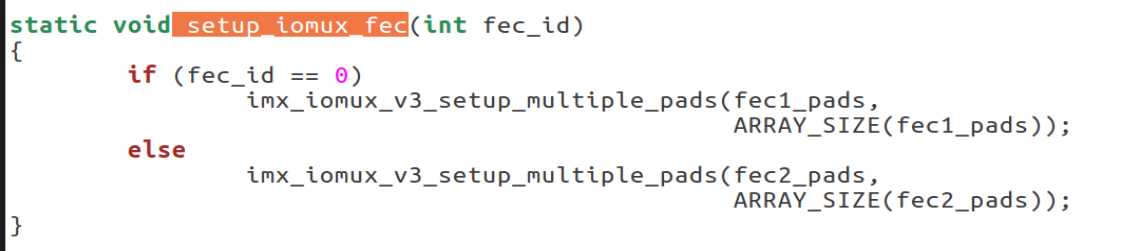
函数 setup_iomux_fec 就是根据 fec1_pads 和 fec2_pads 这两个网络 IO 配置数组来初始化I.MX6ULL 的网络 IO。
我们需要在其中添加网络复位 IO 的初始化代码,并且复位一下 PHY 芯片,修改后的 setup_iomux_fec 函数如下:
cpp
static void setup_iomux_fec(int fec_id)
{
if (fec_id == 0)
{
imx_iomux_v3_setup_multiple_pads(fec1_pads,ARRAY_SIZE(fec1_pads));
gpio_direction_output(ENET1_RESET, 1);
gpio_set_value(ENET1_RESET, 0);
mdelay(20);
gpio_set_value(ENET1_RESET, 1);
}
else
{
imx_iomux_v3_setup_multiple_pads(fec2_pads,ARRAY_SIZE(fec2_pads));
gpio_direction_output(ENET2_RESET, 1);
gpio_set_value(ENET2_RESET, 0);
mdelay(20);
gpio_set_value(ENET2_RESET, 1);
}
mdelay(150); /* 复位结束后至少延时 150ms 才能正常使用*/
}包含ENET1 和 ENET2 的复位 IO 初始化,将这两个 IO 设置为输出并且硬件复位一下 LAN8720A,这个硬件复位很重要。
最后复位结束以后一定要至少延时 150ms 才能操作 SR8201F,这个在 SR8201F 数据手册里面有详细要求的, 否则会导致 uboot 无法识别 SR8201F。
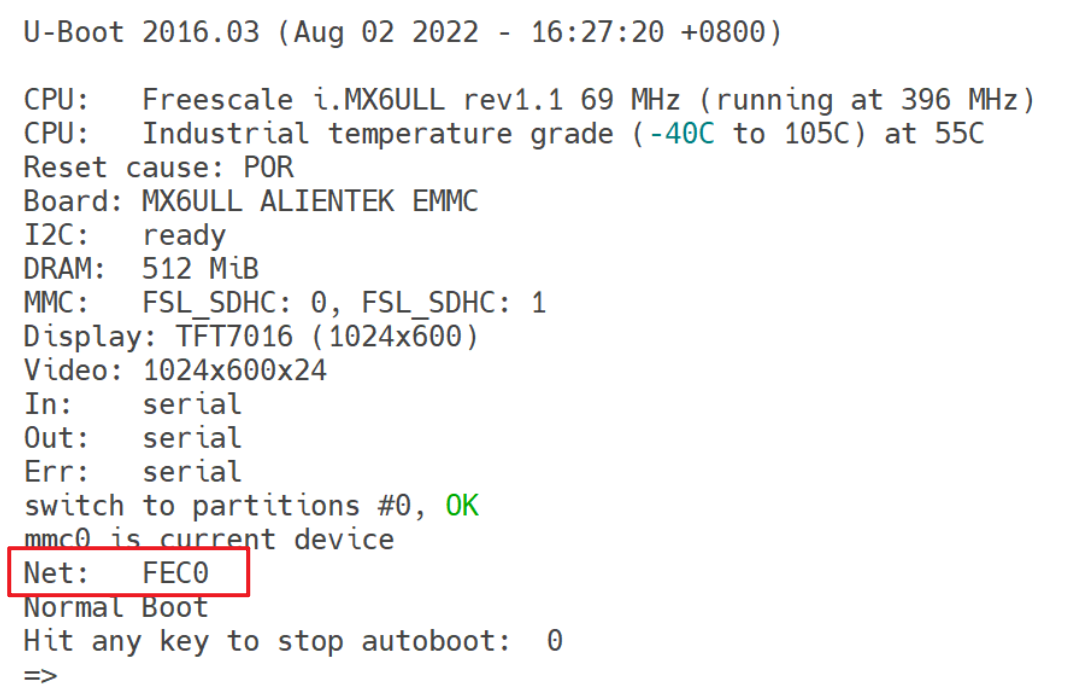
至此网络的复位引脚驱动修改完成,重新编译 uboot,然后将 u-boot.bin 烧写到 SD 卡中并启动, uboot 启动信息如图:
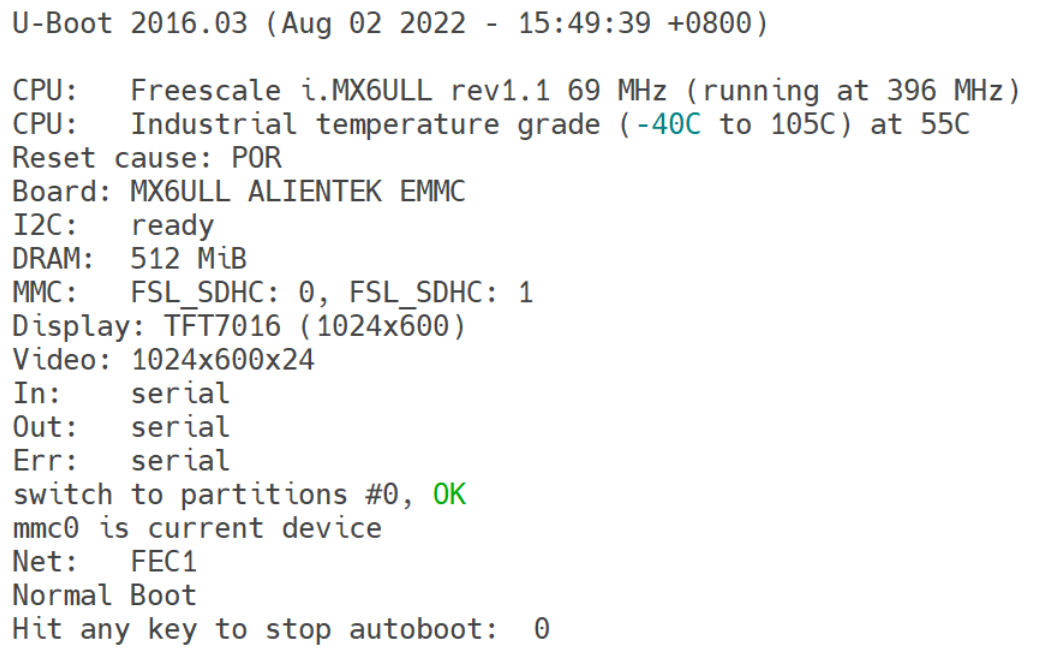
可以看到"Net: FEC1"这一行,提示当前使用的 FEC1 这个网口,也就是 ENET2。
在 uboot 中使用网络之前要先设置几个环境变量,命令如下:
cpp
setenv ipaddr 192.168.1.55 //开发板 IP 地址
setenv ethaddr b8:ae:1d:01:00:00 //开发板网卡 MAC 地址
setenv gatewayip 192.168.1.1 //开发板默认网关
setenv netmask 255.255.255.0 //开发板子网掩码
setenv serverip 192.168.1.250 //服务器地址,也就是 Ubuntu 地址
saveenv //保存环境变量设置好环境变量以后就可以在 uboot 中使用网络了,用网线将 I.MX6U-ALPHA 上的 ENET2与电脑或者路由器连接起来,保证开发板和电脑在同一个网段内。
可以通过 ping 命令来测试一下网络连接:
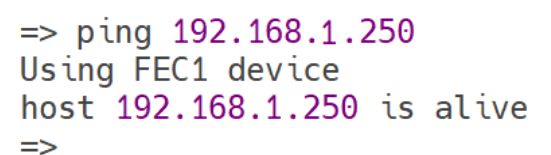
如果想测试一下 ENET1 的网络是否正常工作,打开 mx6ull_alientek_emmc.h,将 CONFIG_FEC_ENET_DEV 改为 0,然后重新编译一下 uboot 并烧写到 SD 卡中重启。
uboot 输出信息如图:
ping 主机也成功,就说明 ENET1 网络工作正常。
修改板子名字
在 uboot 启动信息中会打印板子名称,"Board: MX6ULL 14x14 EVK",要将其改为我们所使用的板子名字,比如" MX6ULL ALIENTEK EMMC"。
在board/freescale/mx6ull_alientek_emmc/路径下,打开文件 mx6ull_alientek_emmc.c,找到如下内容:
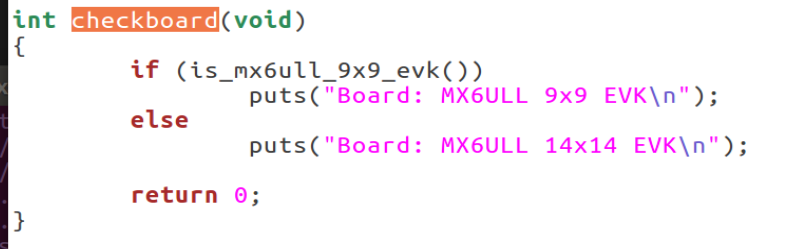
puts函数的打印内容修改为自己的板子。比如我是这样的:
cpp
int checkboard(void)
{
if (is_mx6ull_9x9_evk())
puts("Board: MX6ULL 9x9 EVK\n");
else
puts("Board: MX6ULL ALIENTEK EMMC\n");
return 0;
}修改完成以后重新编译 uboot 并烧写到 SD 卡中验证, uboot 启动信息如图:
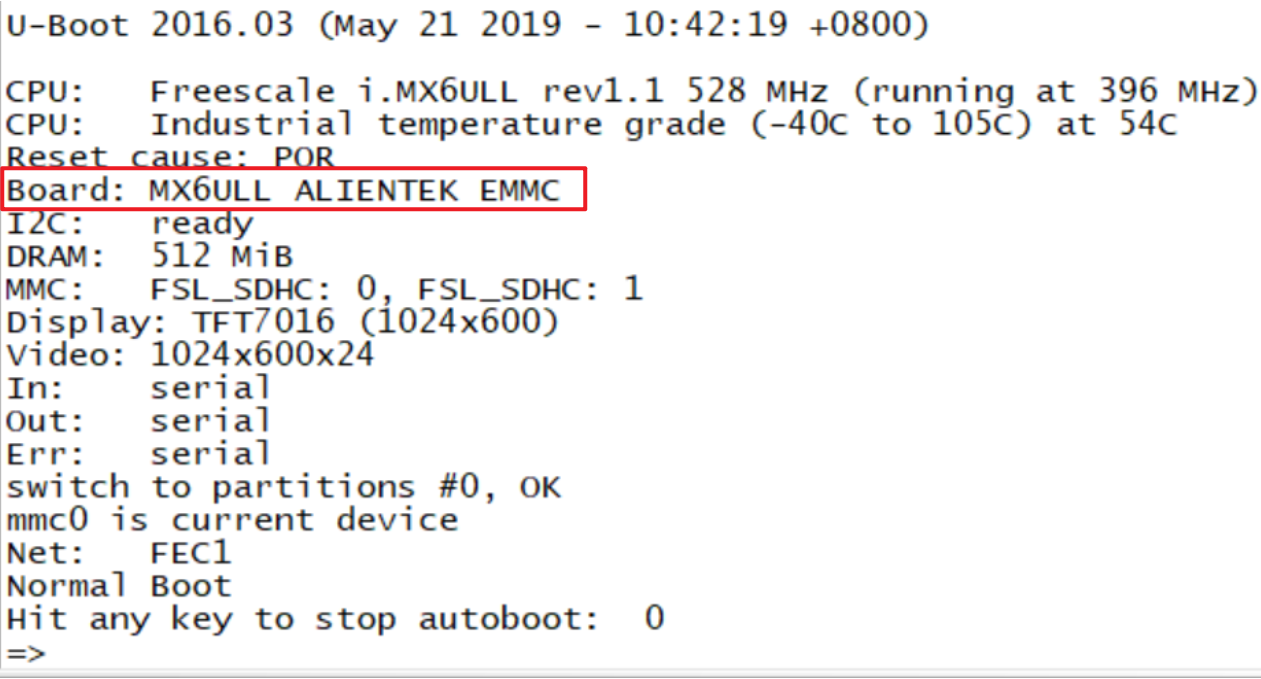
至此 uboot 的驱动部分就修改完成了, uboot 移植也完成了。
uboot 的最终目的就是启动 Linux 内核,所以需要通过启动 Linux 内核来判断 uboot 移植是否成功。我们下讲内容再来继续学习。