硬件平台:正点原子阿波罗STM32F429IGT6
zephyr版本:Zephyr version 4.2.0
开发环境:wsl ubuntu 24.4
前景提要:
一.修改app.overlay
app.overlay是board设备树的覆写文件·,你可以在app.overlay里边对dts文件内容进行追加,修改,删除。在文件中添加代码
cpp
/*
* Copyright (c) 2019 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
&i2c1 {
mpu6050@68 {
compatible = "invensense,mpu6050";
reg = <0x68>;
status = "okay";
int-gpios = <&gpioa 15 GPIO_ACTIVE_LOW>;
};
};二.修改prj.conf
文件中添加代码,启用I2C,传感器模块和MPU6050模块
cpp
# 启用 I2C 和 MPU6050 驱动
CONFIG_I2C=y
CONFIG_SENSOR=y
CONFIG_MPU6050=y
CONFIG_MPU6050_TRIGGER_NONE=y
CONFIG_CBPRINTF_FP_SUPPORT=y三.修改main.c
mian.c要修改的内容就是MPU6050示例代码里边的内容,文件地址:/home/user/zephyrproject/zephyr/samples/sensor/mpu6050/src/main.c
cpp
/*
* Copyright (c) 2019 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: Apache-2.0
*/
#include <zephyr/kernel.h>
#include <zephyr/device.h>
#include <zephyr/drivers/sensor.h>
#include <stdio.h>
static const char *now_str(void)
{
static char buf[16]; /* ...HH:MM:SS.MMM */
uint32_t now = k_uptime_get_32();
unsigned int ms = now % MSEC_PER_SEC;
unsigned int s;
unsigned int min;
unsigned int h;
now /= MSEC_PER_SEC;
s = now % 60U;
now /= 60U;
min = now % 60U;
now /= 60U;
h = now;
snprintf(buf, sizeof(buf), "%u:%02u:%02u.%03u",
h, min, s, ms);
return buf;
}
static int process_mpu6050(const struct device *dev)
{
struct sensor_value temperature;
struct sensor_value accel[3];
struct sensor_value gyro[3];
int rc = sensor_sample_fetch(dev);
if (rc == 0) {
rc = sensor_channel_get(dev, SENSOR_CHAN_ACCEL_XYZ,
accel);
}
if (rc == 0) {
rc = sensor_channel_get(dev, SENSOR_CHAN_GYRO_XYZ,
gyro);
}
if (rc == 0) {
rc = sensor_channel_get(dev, SENSOR_CHAN_DIE_TEMP,
&temperature);
}
if (rc == 0) {
printf("[%s]:%g Cel\n"
" accel %f %f %f m/s/s\n"
" gyro %f %f %f rad/s\n",
now_str(),
sensor_value_to_double(&temperature),
sensor_value_to_double(&accel[0]),
sensor_value_to_double(&accel[1]),
sensor_value_to_double(&accel[2]),
sensor_value_to_double(&gyro[0]),
sensor_value_to_double(&gyro[1]),
sensor_value_to_double(&gyro[2]));
} else {
printf("sample fetch/get failed: %d\n", rc);
}
return rc;
}
int main(void)
{
const struct device *const mpu6050 = DEVICE_DT_GET_ONE(invensense_mpu6050);
if (!device_is_ready(mpu6050)) {
printf("Device %s is not ready\n", mpu6050->name);
return 0;
}
while (!IS_ENABLED(CONFIG_MPU6050_TRIGGER)) {
int rc = process_mpu6050(mpu6050);
if (rc != 0) {
break;
}
k_sleep(K_SECONDS(2));
}
/* triggered runs with its own thread after exit */
return 0;
}四.编译烧录
在app目录下输入指令
bash
west build -b stm32f429i_alientek -p成功: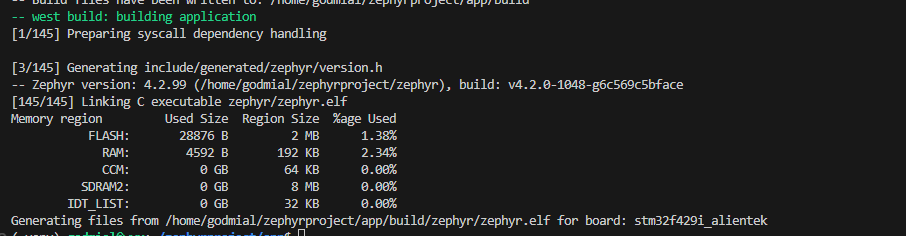
bash
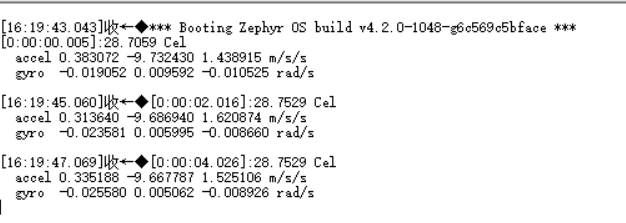
west flash实验现象: