✳️ 引言:低空感知,正重构数字世界的"底层感官接口"
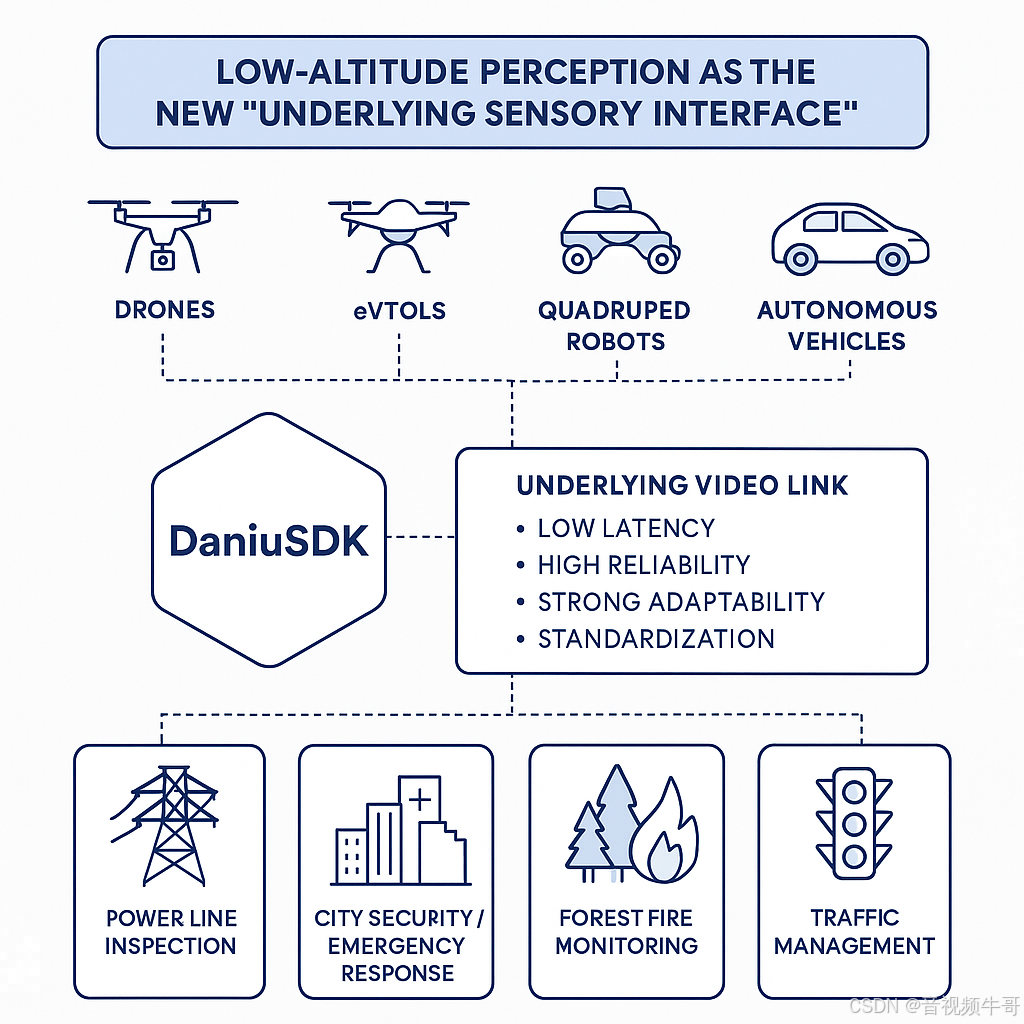
随着低空经济进入规模化部署阶段,感知系统不再是"任务辅助",而是演变为支撑智能化运行的基础设施核心模块 。从电力巡检的高空细节识别,到城市安防的区域态势掌控,从林区火情的边缘监测,到交通治理的实时决策辅助,低空域正在成为**新一代"数据采集与认知边界"**的主战场。
这一转变的背后,是多类型智能载体的快速普及与联网协同:无人机、eVTOL、四足机器人、无人车等终端,正从"孤立运行"走向"集群协作",其视频感知能力承担着关键的"视觉神经"角色。
而要支撑这种分布式、异构化、任务多样的感知系统建设,视频链路的标准化与高性能能力成为核心挑战------链路必须具备:
-
📷 高分辨率+高帧率图像采集
-
🚀 毫秒级低延迟的跨网传输
-
🧠 与AI模块解耦协同的帧数据接口
-
📡 在复杂网络环境下的自适应韧性
在这条通感链路中,大牛直播SDK 作为一套覆盖推流、播放、服务、转发、录像等多模块的跨平台低延迟视频基础能力集,已在多个低空感知场景中完成深度嵌入与工程验证,成为智能感知系统中不可或缺的"视频基础设施构建单元"。
🛰 第二部分:典型低空感知场景分类 ------ 多样任务驱动下的通感需求分层
低空感知并非单一场景的标准化输出,而是在电力、安防、交通、环保等多个垂直领域中,围绕"实时可视+智能理解"展开的多样化任务体系。每一类场景对视频采集、处理与传输的要求存在显著差异,形成了对视频通感能力的精细分层需求。
Windows平台 RTSP vs RTMP播放器延迟大比拼
Android平台RTSP播放器时延测试
Android平台RTMP直播播放器延迟测试
以下为当前最具代表性的六大类低空感知场景及其技术特征:
✅ 六类典型低空感知场景 × 大牛直播SDK模块能力映射表
| 场景类型 | 视频通感需求 | 推荐大牛直播SDK模块组合 | 支持功能 |
|---|---|---|---|
| 1. 电力巡检场景 | 📷 4K图像采集 + 秒级AI识别 + RTSP本地预览 + RTMP远程上传 | 🔹 SmartPublisher(推流) 🔹 SmartRecorder(录像) 🔹 轻量级RTSP服务模块 🔹 AI帧接口模块(YUV输出) |
⏺ H.264、H.265编码+码控 🧠 YUV帧对接YOLO/缺陷检测 🌐 双路(本地+远程)并发推流 |
| 2. 城市安防 / 应急指挥 | 🚁 多视角RTMP并发 + 🎥 视频回看 + 🌐 异构网络适应 | 🔹 RTMP推流模块 🔹 多路RTSP转RTMP推送模块 🔹 SmartPlayer(指挥平台回显) 🔹 录像模块(本地存储) |
📡 多终端调度 ⏯ 秒级延迟播放 📥 事件录制/导出 |
| 3. 林区防火与自然保护 | 🌲 超视距图像 + 📶 弱网缓存 + 🧠 离线AI识别 | 🔹 SmartPublisher推流模块 🔹 SmartRecorder(断网存储) 🔹 第三方AI帧接口模块 🔹 快照模块(图像提取) |
🛰 离线边录 ⚡ 火点识别触发推送 📤 快照结构化上传 |
| 4. 智能交通治理 | 🛣 多端同步显示 + 📡 视频融合GIS + 📸 快照触发 | 🔹 SmartPlayer(车端/指挥端播放) 🔹 录像+快照模块 🔹 控制接口层(分辨率/码率动态调节) |
📊 多平台兼容:Unity/Android/Windows 🧭 快照打点配合GIS 🧩 可视化联动系统 |
| 5. 边防 / 海防巡逻 | 🌊 RTSP低带宽推流 + 🛰 本地录像备份 | 🔹 轻量级RTSP服务模块 🔹 SmartRecorder(本地录像) 🔹 RTSP拉流播放模块 |
📶 弱网环境适应 📁 本地文件断点合并 🛰 无人艇回放、补传 |
| 6. 工业园区 / 化工厂巡检 | 🏭 本地AI分析 + 🧪 快照上传 + 异常报警 | 🔹 轻量级RTSP服务 🔹 SmartPlayer(本地预览) 🔹 快照模块 + 第三方AI帧接口 |
🔐 封闭网络内可控 🧠 离线模型运行(如目标检测) 📤 事件报警图上传云平台 |
🧩 低空感知任务的三类通感特征分布
我们可以将上述典型任务场景进一步抽象出以下三类视频链路特征:
| 通感维度 | 类型说明 | 典型代表场景 |
|---|---|---|
| 任务延迟敏感型 | 视频链路要求毫秒级响应,支持远程实时决策与交互 | 空中安防调度、事故应急处置 |
| 视觉清晰度优先型 | 视频图像要求高分辨率、高动态范围,供AI分析使用 | 电力塔缺陷识别、森林火情监控 |
| 稳定性与冗余保障型 | 网络不稳定或任务不可预期,需支持边录边传等策略 | 海防巡逻、林区无人站点监控 |
✅ 大牛直播SDK如何精准匹配?
大牛直播SDK通过其模块化架构,在不同场景中灵活调度所需通感能力组合:
-
🧠 在高分辨率AI场景中,提供 YUV/RGB帧回调接口 + 零拷贝解码渲染;
-
🌐 在高延迟容忍低带宽环境下,支持 码率动态控制;
-
🔁 在断网/弱网场景下,内置 按需录像、高、低分辨率双路编码推流切换机制。
🧠 第三部分:大牛直播SDK能力映射 ------ 构建弹性、泛在、智能的低空视频通感引擎
面对前述各类低空感知任务对视频链路提出的高分辨率采集、高可靠传输、高灵活适配、高效率处理 的复杂要求,大牛直播SDK通过模块化能力解耦设计 ,在视频"采 → 编 → 传 → 播 → 存 → 构 → 分"全链路上提供了精准、稳定、可扩展的能力支持。
🧩 模块能力矩阵映射表
| 模块名称 | 功能特性 | 应用侧定位 | 对应场景 |
|---|---|---|---|
| 🎥 推流模块(SmartPublisher) | 支持软/硬编码(H.264/H.265)、码率自适应、断线重连、双路推流录像(RTSP+RTMP) | 📦 终端侧无人机 / 四足机器人 / 工业网关 | 电力巡检、林火监测、园区巡逻 |
| 📡 轻量级 RTSP 服务模块 | 嵌入式设备上启动内置 RTSP Server,支持多客户端观看、内网访问、权限控制 | 📟 边缘端 ARM Linux 系统 / 工控机 | 工业厂区本地部署、无人站点 |
| 📺 播放器模块(SmartPlayer) | 支持 RTSP、RTMP、HTTP-FLV 播放,100~200ms 低延迟,支持 Android/iOS/Windows/Linux/Unity | 📱 指挥终端 / 大屏回显 / 可穿戴设备 | 安防调度、交通监管 |
| 🧠 AI 数据帧接口模块 | 支持帧级 YUV / RGB 数据回调,提供原始解码图像 | 🧠 AI 模型处理器 / YOLOv8 / OCR 模型接入层 | 火点识别、目标检测、视频结构化 |
| 🔄 多路转发模块(StreamRouter) | 支持拉取前端设备RTSP转推RTMP或GB28181 | 🌐 调度平台 / 中控服务器 | 多终端并发调度、远程协作 |
| 📦 录像与快照模块(SmartRecorder) | 支持手动/定时录像、JPEG 快照、自动命名与上传、时间戳嵌入 | 📁 存证记录 / 异常分析 / 审计链路 | 安全巡查、事后溯源、AI回溯分析 |
| 🔐 控制与配置接口层 | 支持动态配置码率、分辨率、GOP、目标地址,支持热启动、远程控制、配置持久化 | ⚙️ 远程运维系统 / 自主飞控 / 平台管理后台 | 云端任务编排、自动化感知部署 |
🧬 能力覆盖关键技术指标
| 指标类别 | 技术支持能力 |
|---|---|
| 📏 视频格式兼容 | H.264、H.265、AAC、PCM、JPEG |
| 🖥 系统平台支持 | Android / iOS / Windows / Linux / Unity3D / ARM |
| 🔁 推送协议支持 | RTSP / RTMP / HTTP-FLV |
| ⏱ 传输延迟能力 | RTSP播放器低、RTMP推流播放端到端低至 200ms |
| 🧠 AI对接能力 | 提供帧级图像数据 + 时间戳同步 + 多通道切换 |
| 📦 部署形态 | 本地SDK集成 / 跨平台打包 / 云边混合部署 |
🧱 系统架构图:DaniuSDK × Low-Altitude Perception
以下是典型低空视频感知系统架构图,展示了从终端到平台、从边缘到中心的视频链路闭环构建路径(英文):
css
+---------------------------+
| AI Perception Platform |
| (Cloud / Edge) |
+------------+--------------+
↑
[YUV/RGB Frame Callback]
↑
+----------------+----------------+
| SmartPlayer SDK (Viewer) |
| Android / iOS / Windows |
+----------------+----------------+
↑
[RTSP / RTMP / HTTP-FLV]
↑
+----------------+----------------+
| SmartPublisher SDK (Streamer) |
| + Light RTSP Server (optional) |
+----------------+----------------+
↑
+-----------------------------------+
| UAV / Robot / Smart Terminal |
| - 4K Camera Sensor |
| - ARM Linux / Android / RTOS |
+-----------------------------------+🎯 架构亮点:
-
灵活部署:模块支持混合加载,轻量 RTSP 服务可嵌入低内存占用场景;
-
极简接入:提供统一 API 封装,适配 JNI / C++ / C# / Unity / Python;
-
高稳定性:已在森林防火、无人巡检、电力系统等场景稳定运行多年;
-
AI Ready:支持与 YOLO、DeepStream、OpenVINO 等 AI 框架对接,开箱即用。
🚁 第四部分:典型场景落地案例 ------ 从技术能力到实战闭环
大牛直播SDK 已在全国多个行业应用中完成部署落地,涵盖能源、电力、应急、环保、安防等领域,成功支撑了从前端感知到后端分析的完整视频链路闭环。
以下为几个具代表性的典型案例:
✅ 案例 1:国家电网 × 无人机电力线路巡检系统
| 内容 | 说明 |
|---|---|
| 📌 项目背景 | 高压输电线路需定期巡检,传统人工作业效率低、风险高,亟需部署无人化、智能化巡检系统。 |
| 🛠 部署方案 | 每架无人机搭载高清相机 + ARM嵌入模块,运行大牛直播SDK推流模块与轻量级RTSP服务,图像实时传回地面控制站;地面站使用播放器SDK低延迟预览,支持AI识别异常点。 |
| 🔍 关键模块 | SmartPublisher + SmartPlayer + AI图像帧接口 + 录像模块 |
✅ 案例 2:应急管理局 × 空地一体应急调度平台
| 内容 | 说明 |
|---|---|
| 📌 项目背景 | 应对突发灾害(如山体滑坡/爆炸事故)需快速部署空中可视化系统,实现远程指挥。 |
| 🛠 部署方案 | 多架无人机同步起飞,通过 4G/5G 网络推流至调度中心,使用大牛直播SDK的 RTMP 推流 + 多路转发模块,实现多视角同步显示。 |
| 🔍 关键模块 | RTMP推流模块 + RTSP转RTMP推送模块+ HTTP-FLV播放模块 + 录像模块 |
✅ 案例 3:林区 × 智能林火预警系统
| 内容 | 说明 |
|---|---|
| 📌 项目背景 | 林区通信基础设施薄弱,火点识别难、传输慢,急需部署具备本地识别与远程回传能力的视频链路。 |
| 🛠 部署方案 | 通过四足机器人和定点无人机结合,部署大牛直播SDK在本地完成视频采集、编码与缓存,火点识别后通过离线触发推流。 |
| 🔍 关键模块 | 本地RTSP Server + 预录缓存 + YOLO图像识别对接 + 快照上传 |
✅ 案例 4:滨海防控 × 无人艇海岸线巡航系统
| 内容 | 说明 |
|---|---|
| 📌 项目背景 | 无人艇在海岸线远距离巡逻中,面临带宽不稳定与视距远的问题,需视频系统具备强抗抖、断点续传能力。 |
| 🛠 部署方案 | 大牛直播SDK推流模块启用 轻量级RTSP服务模式,在船体嵌入平台运行,并部署本地录像 |
| 🔍 关键模块 | 轻量RTSP服务 + RTSP播放模块 + 录像模块 |
✅ 案例 5:化工园区 × 四足机器人智能巡检系统
| 内容 | 说明 |
|---|---|
| 📌 项目背景 | 危险化工厂区存在高温、有毒等风险,需部署高频次、无人值守的自主巡检机器人。 |
| 🛠 部署方案 | 机器人内置摄像头采集视频,运行大牛直播SDK实现轻量级RTSP服务 + 快照本地存储,并通过图像识别模型自动标注异常点。 |
| 🔍 关键模块 | 轻量级RTSP服务 + RTSP播放模块 + 快照模块 + 录像存储 + AI对接接口 |
🧾 小结:从落地到普及,SDK模块化成就"视频神经中枢"
通过这些典型案例可以看出,大牛直播SDK的模块能力具备:
-
✅ 平台可移植:兼容嵌入式Linux、Android、Windows;
-
✅ 链路可组合:根据场景自由选配推流/转发/播放器/AI帧输出;
-
✅ 部署可扩展:支持从单点部署到集群并发、多边协同;
-
✅ 通信可自适应:在低带宽、断网环境下,尽量保持数据完整性与可用性。
它不再只是"一个视频工具",而是面向低空智能系统构建的标准通感能力单元,正加速成为未来低空平台的"视觉神经基建"。
🔚 第五部分:总结与展望 ------ 让"视频感知能力"成为低空系统的默认基础设施
在低空经济从试点验证走向体系化布局的转型过程中,视频感知能力的标准化构建 正成为行业普遍共识。从单点巡检到全域布控,从离线回传到实时互动,未来的空中平台、机器人系统、边缘节点,都需要具备一个共同的能力底座------"视频+AI"感知通路的稳定输出能力。
大牛直播SDK,作为一套面向工业级视频系统构建而设计的底层能力组件,正在以其 模块化、低延迟、高适配性 的特点,成为各类低空感知系统中不可替代的"视频基础设施单元"。
🎯 我们看到了这些变化正在发生:
-
✅ 每一架无人机、每一台机器人,都在变成移动的视觉神经元
-
✅ 实时视频流,已成为 AI 系统理解世界的第一输入信号
-
✅ 低延迟、跨平台的视频链路,是远程协同与智能决策的起点
🚀 展望未来:视频通感能力将在以下方向持续演进
| 方向 | 趋势 | SDK布局 |
|---|---|---|
| 空天地一体协同链路 | 无人机 + 移动网络 + 地面终端构成闭环 | SDK支持多协议推送和播放 |
| 边云协同 AI 识别链路 | 视频边缘识别+云端大模型理解 | 提供帧级 YUV/RGB 输出 + 快照推送 |
| 视频感知与控制闭环融合 | 从视频观察到视频驱动决策执行 | 播放端支持AI融合反馈、标注回传 |
| SDK 与新硬件平台融合 | 国产芯片、Jetson等异构芯片兴起 | SDK提供静态库/NDK/JNI等多种适配形态 |
| 视频链路即服务(VaaS) | 视频能力通过接口服务化提供 | SDK支持私有云部署 |
🧩 视频不是附属功能,而是智能感知系统的"输入层"
大牛直播SDK的设计理念,从一开始就不是"播放器"或"推流工具",而是为了解决:
如何让一帧视频数据,从摄像头采集开始,就具备被AI理解、被人实时感知、被系统调度控制的能力。
这也意味着,大牛直播SDK不仅仅是某个"视频模块"的集合,而是面向未来低空智能体系的视频感知标准栈,具备在更大范围、更深层系统中持续演化与嵌入的能力。
✅ 写在最后:让"每一帧看见",成为"每一次决策"的起点
📡 从城市上空到边境海岸,从管道廊道到林区深处,大牛直播SDK 正在帮助越来越多的无人化平台,完成从"能拍"到"看懂"再到"实时响应"的闭环构建。
未来已来,感知在前。
让视频成为系统的"眼睛",让每一帧数据都成为智能的可能。
📎 CSDN官方博客:音视频牛哥-CSDN博客****