一、单片机MCU
1.1 单片机和嵌入式
- 嵌入式系统
以计算机为核心, tips :计算机【处理单元,内存 + 硬盘】
可以控制的外部设备,传感器,电机,继电器
嵌入式开发 数据源 --> 处理器 (CPU MCU MPU) --> 执行器
计算机通过硬件连接和程序控制,让整个设备可以满足用户的需求,例如 智 能手表,汽车驾驶辅 助,无人机,武器系统,智能家居。 - 单片机 --> MCU
MCU ( Microcontroller Unit ) 微型控制单元,主要包括
中央处理器,指令处理单元
ROM 硬盘 / 存储空间
RAM 运行内存
可以认为 MCU 是一个小型计算机系统。具备独立运行控制执行的作用。
1.2 ARM公司
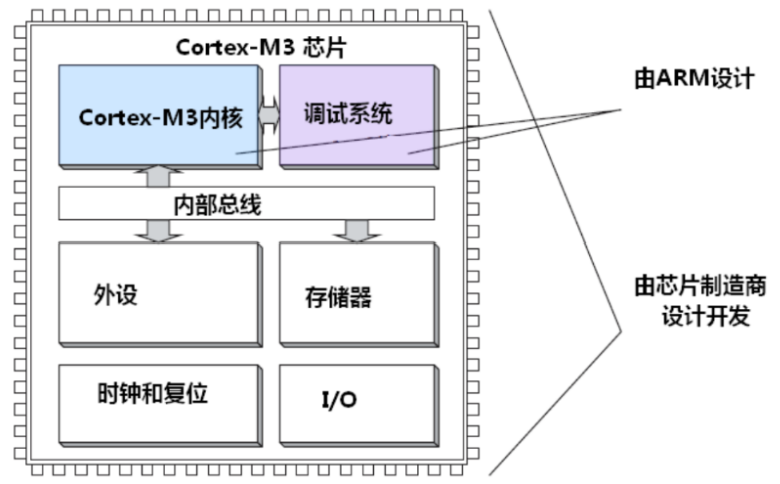
ARM Holdings( Advanced RISC Machines )不生产芯片,仅提供芯片设计方案和芯片解决方案。
以下是 ARM 公司对外提供的芯片内核方案:
Cortex-A 内核 ,更新频率更快,性能最好,紧跟市场潮流!!!主要用于要求性能较高,能
耗支持较高的使用场景,利用手机 SOC/ 高通,小米,联发科,苹果。车机芯片, ARM 开发
板。后续驱动课程使用的芯片 RK3399 (dual-core Cortex-A72 and quad-core Cortex-A53)
RK3588 基于 Cortex-A 内核
Cortex-R 内核 常见场景有车辆 ECU ,要求响应速度较快常见
Cortex-M 内核 主要用于 MCU 微型处理器,目前主流的内核方案有 M0 M3 M4 M7, 常见
MCU STM32F1XX(M3 内核 ) STM32F4XX(M4 内核 ) STM32H7XX(M7 内核 )

1.3 常用的32芯片
- 国外芯片
- ST 系列:由 STM 意法半导体公司生产,常用型号有 STMF1、STMF4、STMH7、STMLXX、STMW 等。
- Ti 系列:美国德州仪器公司的产品,该公司是世界上最大的 DSP(数据信号处理)芯片提供商,例如 TM320F28335PGFA。
- 国内芯片
- GD 兆易创新:是目前国内 32 MCU 芯片领域的领头企业,内核采用 ARM 公司提供的 Cortex - M 系列,且完整兼容 STM32 芯片。
- 乐鑫科技:有 ESP32 芯片,以及 WiFi 芯片 ESP8266。
- 华大半导体。
- 沁恒微电子。
- 灵动微电子。
- 国产自研芯片 :架构、内核、知识产权均为国内自主研发。
- 龙芯:主要面向服务器、PC 工业控制、武器装备、政府设施等领域的芯片解决方案。
- 海思:华为旗下的芯片公司。
- 国内车企(如吉利、蔚来、小鹏、长安等)都在自研芯片。
- 目前国内大多数公司都在转向国产芯片方案,这是为了芯片安全和信息安全。学习 STM32 的重点内容是【寄存器操作方式】和【32 标准库方式】开发。
1.4 STM32开发板概述
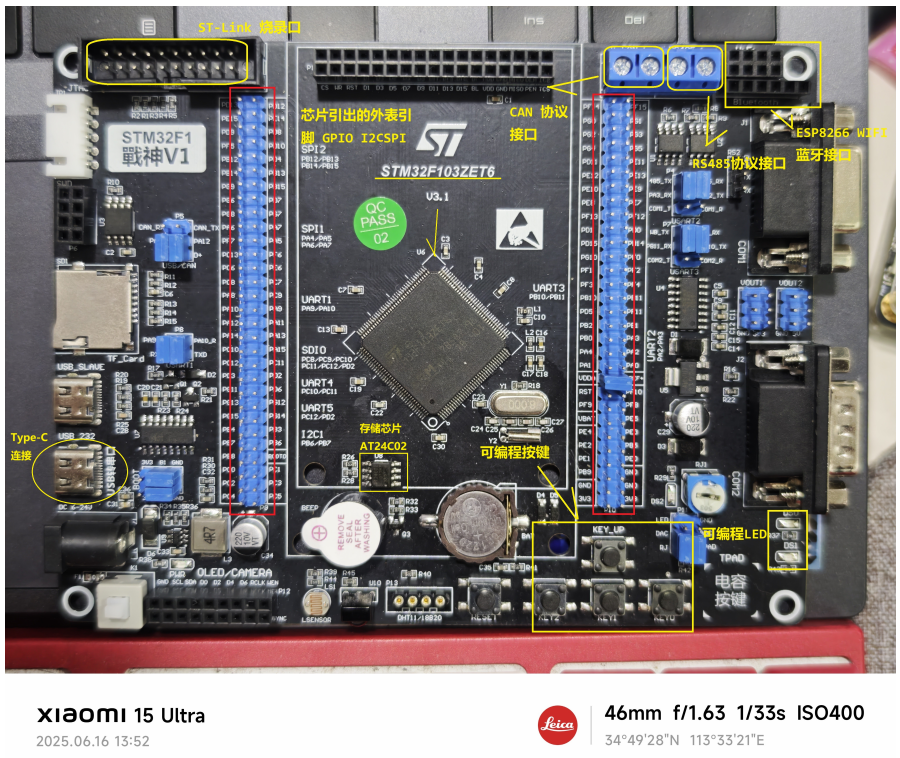
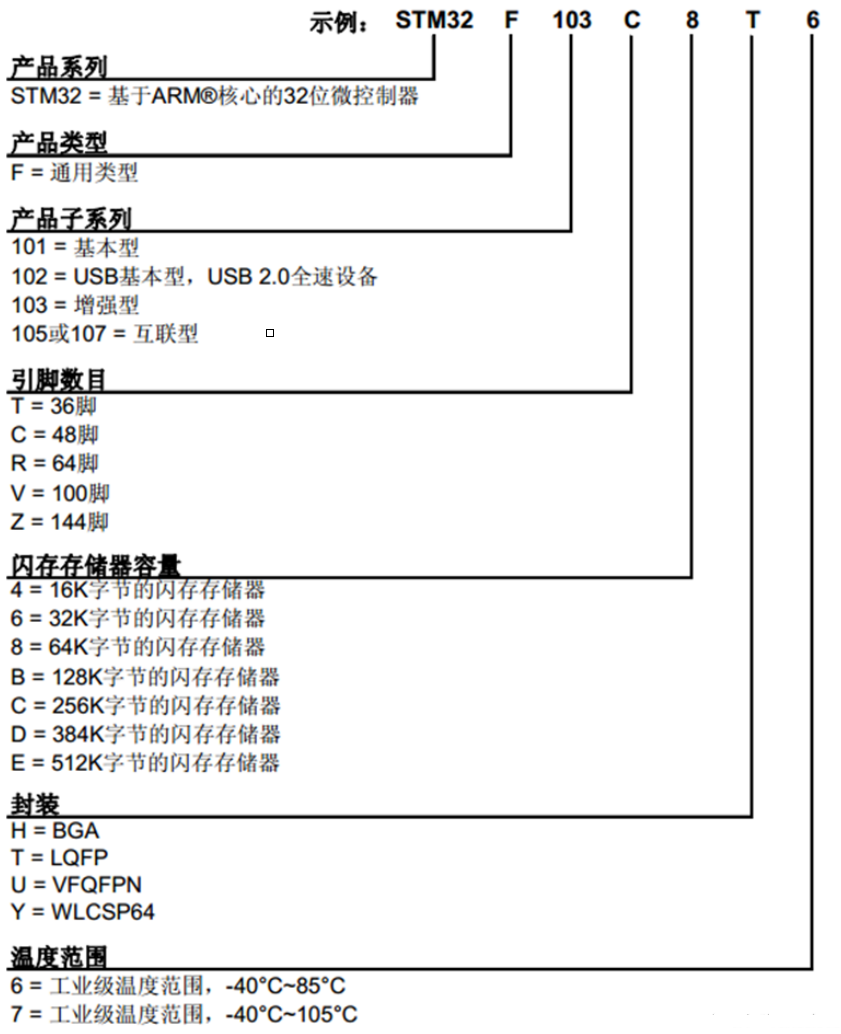
- STM32 是意法半导体公司基于 ARMv7 Cortex - M 内核设计的 32 位 MCU 芯片。
- F 表示通用型号,还有 L、H、W、G 相关系列。
- 103 表示增强型。
- F1xx 表明当前内核为 Cortex - M3 内核。
- ZET6 各部分含义:
- Z:表示引脚数为 144。
- E:表示闪存 Flash 为 512KB,属于大容量存储设备。
- T:表示封装标准为 LQFP 封装。
- 6:表示工作温度限制在 - 40℃~85℃。
二、 GPIO
2.1 GPIO概述
2.1 GPIO 概述
GPIO(General Purpose Input/Output)是 STM32 微控制器最基本、最常用的外设之一,用于与外部设备进行数字信号交互(如控制 LED、读取按键、驱动传感器等)。
咱们学习 Hi3861 中利用 GPIO 完成了 LED 控制,按键控制,传感器数据读取,蜂鸣器控制,利用 GPIO 模版 PWM 控制舵机。
GPIO 的控制核心逻辑
- 输入输出控制
- 高低电平控制
在当前 STM32F103ZET6 中一共有 - 7 组 GPIO 分别对应 GPIOA~GPIOG 分组。
- 同时每一个 GPIO 分组对应 16 个对外引脚,流入 GPIOA00~GPIOA15 ==>PA0~PA15
- STM32F103ZET6 对外可以提供可编程 GPIO 引脚一共是 16 * 7 ==> 112 引脚
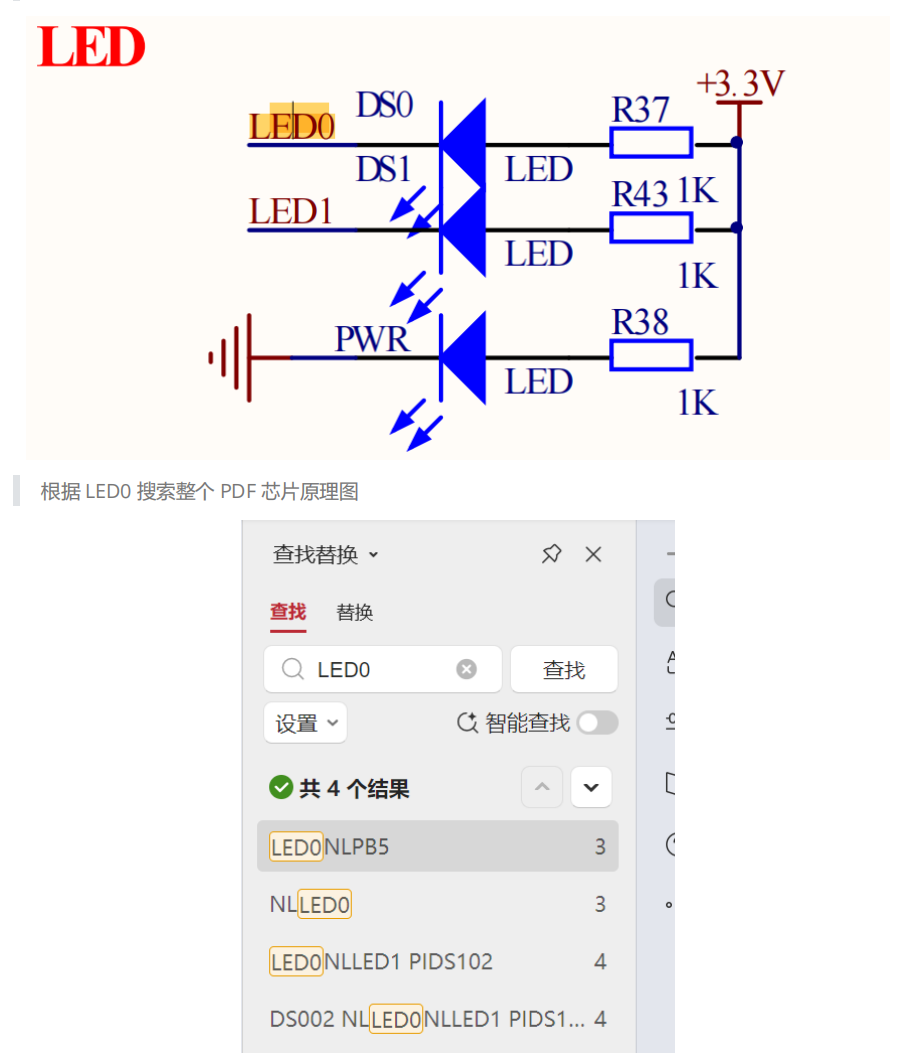
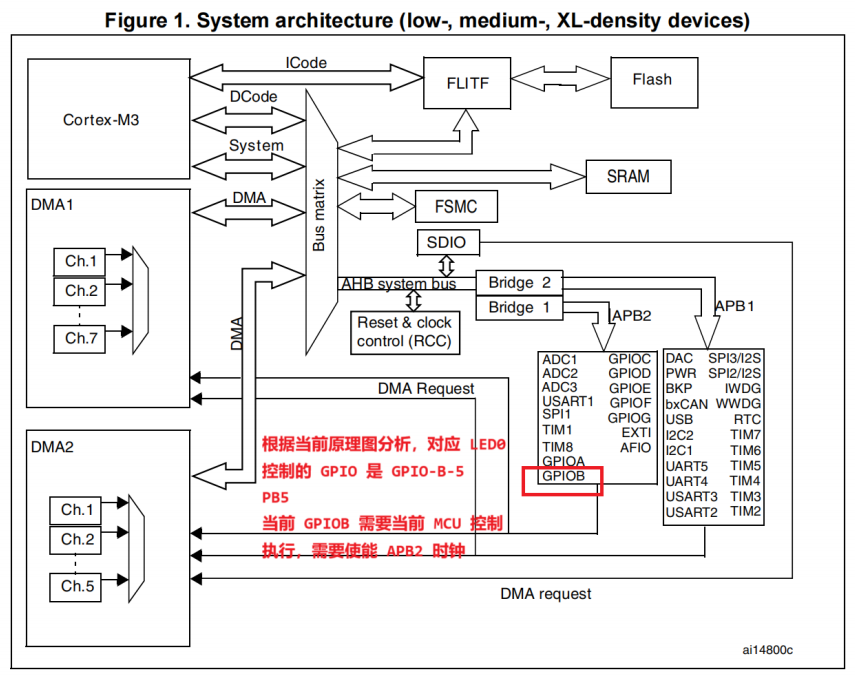
2.2 STM32F103ZET6 原理图简单分析
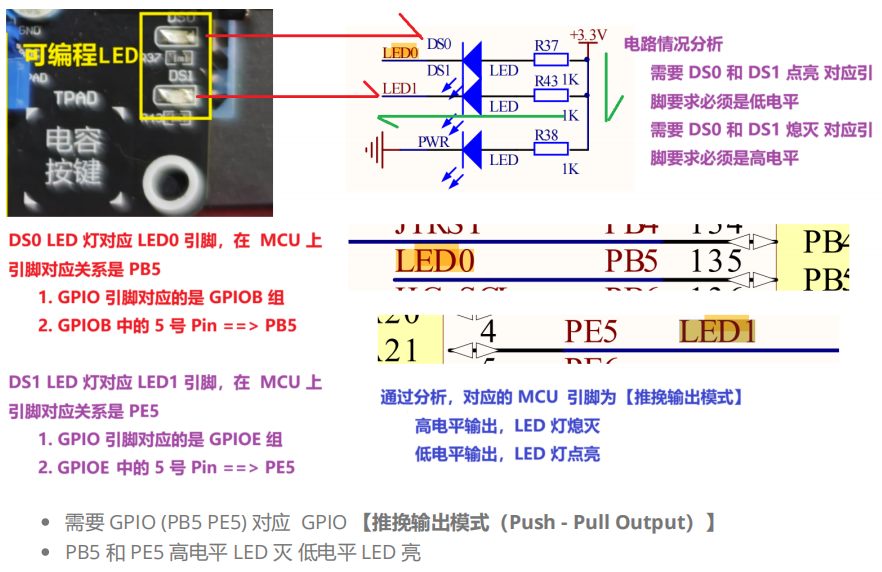
原理图是开发中重要的参考依据,通过原理图分析当前 MCU 芯片引脚对应的功能模块,已经控制方式分析。以 LED 灯为例分析,当前开发板中 DS0 丝印位号对应的 LED 灯在原理图中,对应的引脚为 LED0。

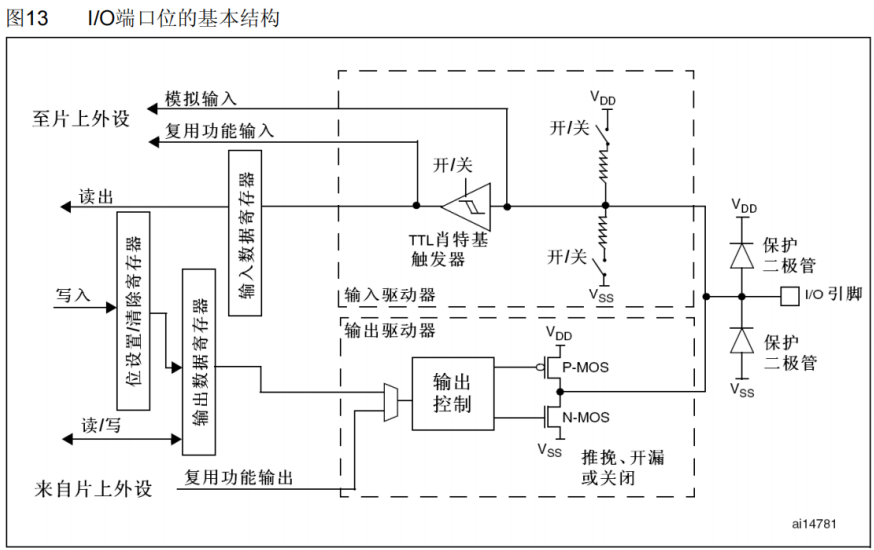
2.3 GPIO STM32模式
在 STM32 开发中,操作 GPIO 需要确定的内容有:
- 那一组 GPIO,例如 GPIOB。
- 操作的 GPIO 是当前组内第几个 Pin 引脚,对应引脚为 5 引脚 ==> GPIOB5 ==> PB5。
- 设置 GPIO 的工作模式。
2.3.1. 浮空输入模式( Floating Input )
原理 :在这种模式下, GPIO 引脚没有接上拉电阻或下拉电阻,其电平状态完全取决于外部电路。引脚处于高阻抗状态,输入电流几乎为零。
应用场景 :适用于外部信号已经有明确的驱动能力和电平状态的情况,比如连接按键,按键
按下时直接将引脚接地,松开时引脚浮空,通过读取引脚电平判断按键状态。
2.3.2. 上拉输入模式( Pull - up Inpu )
原理 : GPIO 引脚内部连接了上拉电阻,当外部电路没有对引脚进行驱动时,引脚电平被上拉到高电平。如果外部电路将引脚拉低,那么引脚电平就为低电平。
应用场景 :常用于按键输入,当按键未按下时,引脚通过上拉电阻保持高电平;按键按下
时,引脚接地变为低电平,避免了引脚浮空可能带来的电平不稳定问题。
2.3.3. 下拉输入模式( Pull - down Input )
原理 :与上拉输入模式相反, GPIO 引脚内部连接了下拉电阻,当外部电路没有对引脚进行驱动时,引脚电平被下拉到低电平。如果外部电路将引脚拉高,那么引脚电平就为高电平。
应用场景 :同样适用于按键输入等场景,当按键未按下时,引脚通过下拉电阻保持低电平;
按键按下时,引脚接高电平。
2.3.4. 模拟输入模式( Analog Input )
原理 :该模式下, GPIO 引脚用于模拟信号的输入,内部的数字逻辑电路被断开,引脚直接连接到模拟信号处理模块,如 ADC (模拟 - 数字转换器)。
应用场景 :用于采集模拟信号,如温度传感器、压力传感器等输出的模拟电压信号,通过
ADC 将模拟信号转换为数字信号进行处理。
2.3.5. 开漏输出模式( Open - Drain Output )
原理 :在开漏输出模式下, GPIO 引脚内部的输出级只有 N 沟道 MOS 管,当输出为低电平
时, MOS 管导通,引脚接地;当输出为高电平时, MOS 管截止,引脚处于高阻态,需要外
部接上拉电阻才能输出高电平。
应用场景 :常用于实现 线与功能 、 I2C 总线 等通信协议,多个开漏输出引脚可以连接在一
起,只要有一个引脚输出低电平,总线就为低电平。
2.3.6. 推挽输出模式( Push - Pull Output )
原理 :推挽输出模式下, GPIO 引脚内部的输出级由 P 沟道 MOS 管和 N 沟道 MOS 管组成。当输出为高电平时,P 沟道 MOS 管导通,引脚输出高电平;当输出为低电平时, N 沟道 MOS 管导通,引脚输出低电平。
应用场景 :适用于直接驱动一些负载,如 LED 灯,能够提供较强的驱动能力。
2.3.7. 复用开漏输出模式( Alternate Function Open - Drain Output )
原理 :该模式下, GPIO 引脚的功能由片上外设控制,输出级采用开漏输出结构。与普通开漏输出模式类似,需要外部接上拉电阻才能输出高电平。
应用场景 :常用于一些通信协议和外设接口,如 SPI 总线 的某些引脚、 I2C 总线 等,将 GPIO 引脚复用为外设的特定功能。
2.3.8. 复用推挽输出模式( Alternate Function Push - Pull Output )
原理 :此模式下, GPIO 引脚的功能由片上外设控制,输出级采用推挽输出结构,能够直接输出高电平和低电平。
应用场景 :常用于一些需要较强驱动能力的外设接口,如 UART 通信的发送引脚、 PWM 信
号输出 等。
2.4 LED开发流程
2.4.1 LED****灯电路分析
2.4.2 LED STM32****开发流程
1.【使能】时钟。
2.GPIO PB5 PE5 设置【推挽输出模式( Push - Pull Output )】
3. 利用寄存器控制 PB5 PE5 引脚电平模式
2.4.3**【时钟】小重点**
时钟可以认为是当前 MCU 的处理能力,运算能力。
STM32F103ZET6 对应的最高主频 72MHz , 当前 MCU 1 秒中可以处理 72M 任务单元。每一个任 务单元对应的时间为 13.88 ns 。
在 MCU 执行过程中,如果没有打开对应的外设时钟,对应外设不会在整个的 MCU 执行周期内容 工作,可以认为是没有开启任务模块。
MCU 为了管理不同的外设,提供时【钟树管】理不同的模块。
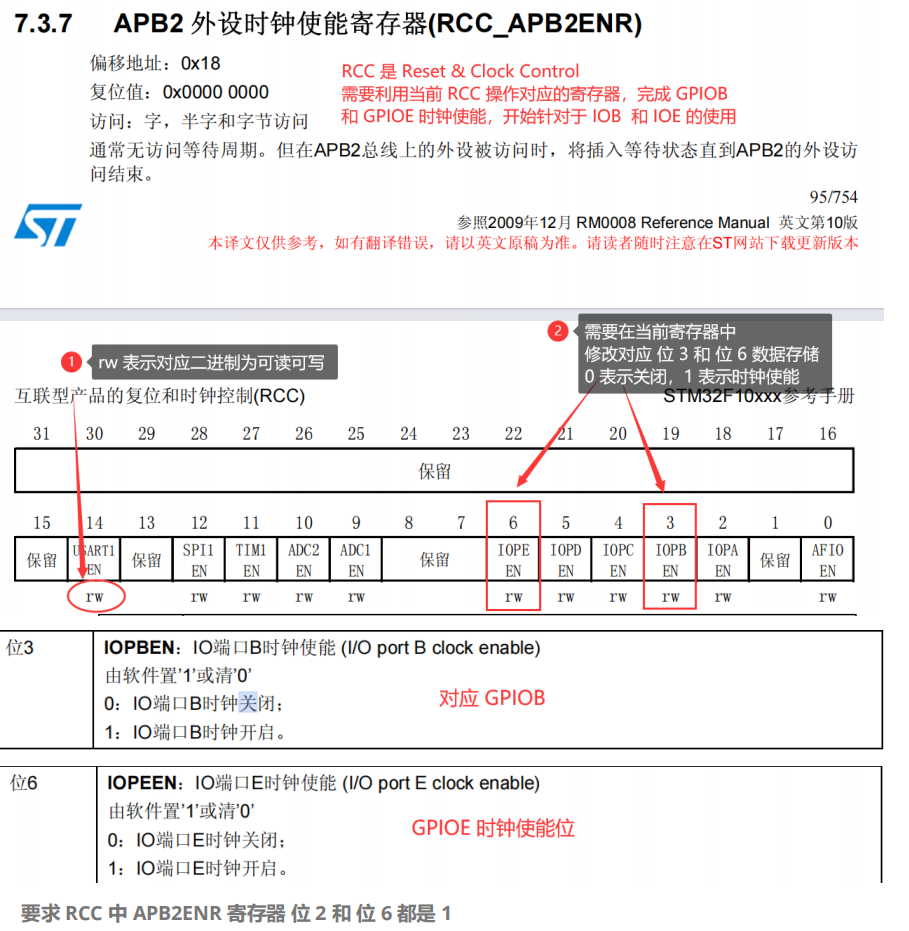
2.4.4 LED对应GPIO****组时钟使能
【寄存器开发模式】
利用 STM32 时钟寄存器,开启对应 APB2 中的 GPIOB 和 GPIOE 两个 GPIO 组时钟使能。 MCU 才可以在执行周期中,运行 GPIOB 和 GPIOE 内容。
对应文档中的内容是 RCC (Reset & Clock Control) 复位和时钟控制。
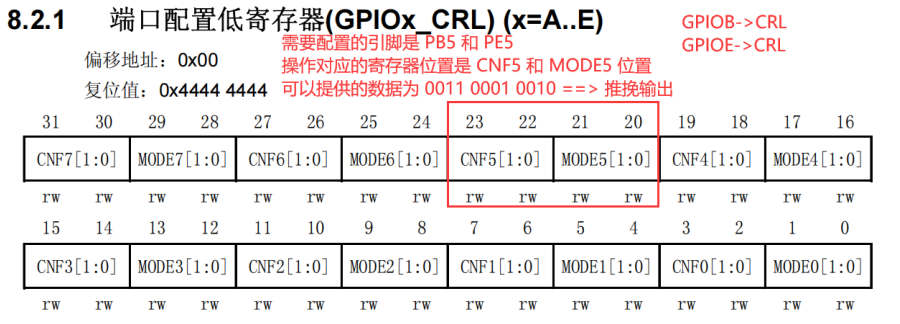
2.4.5 LED对应GPIO****引脚配置
使能之后,需要对引脚进行选择。 STM32 中的 GPIO 配置寄存器对应有两个寄存器
GPIOx_CRL 低位寄存器 --> GPIO 组 0 ~ 7 Pin
GPIOx_CRH 高位寄存器 --> GPIO 组 8 ~ 15 Pin
当前操作的引脚是 PB5 和 PE5 对应 GPIOx_CRL 低位配置寄存器。
在 GPIOx_CRL GPIOx_CRH 每 4 个二进制为对应一个 GPIO 引脚
CNFx (x ==> 0~15) 配置当前 GPIO
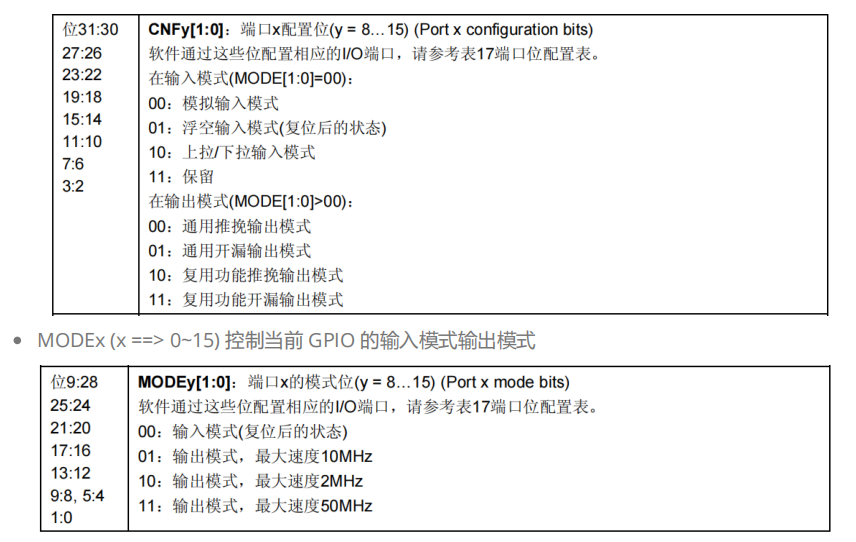
总结效果
- 输出模式 CNF + MODE 寄存器位置效果,速度都使用 50MHz 作为基准
- 0011 推挽输出模式
- 0111 开漏输出模式
- 1011 复用推挽输出模式
- 1111 复用开漏输出模式
- 输入模式 CNF + MODE 寄存器位置效果
- 0000 模拟输入
- 0100 浮空输入
- 1000 上拉 / 下拉输入,需要后续配置 IDR 参数
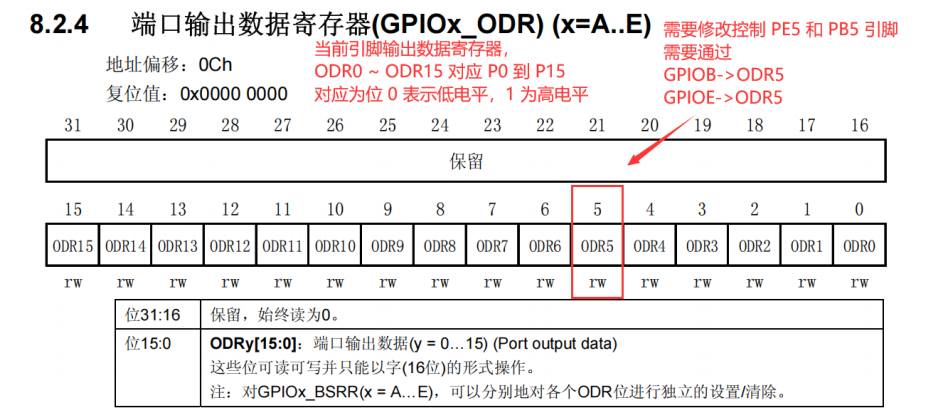
2.4.6****引脚输出高低电平配置
利用 GPIOx_ODR 寄存器配置当前指定引脚的 输出 高电平和低电平状态
2.4.7****代码实现
cpp
#include "stm32f10x.h"
/*
STM32 核心头文件,标准头文件,当前对应 STM32F10x 系列,
当前使用的芯片是 STM32F103ZET6
开发中,需要使用相关函数,相关类型,相关配置都在当前
头文件中。
*/
void Led_Delay(u32 tim);
int main(void)
{
/*
1. 时钟使用,RCC 配置当前 GPIOB 和 GPIOE 两个 GPIO 组使能。
RCC ==> Reset & Clock Control
APB2ENR 当前 APB2 Bridge 对应寄存器配置,当前 APB2ENR
包括 【GPIOA ~ GPIOG】 ADC1,2,3 TIM1 TIM8 USART1 SPI1
根据寄存器文档分析,目标当前寄存器中的数据效果为
【高 16 位不考虑,对应保留位】
0000 0000 0100 1000
0x01 ==> 0000 0001
0x01 << 6 ==> 0100 0000 (GPIOE使能位)
0x01 << 3 ==> 0000 1000 (GPIOB使能位)
0x01 << 6 | 0x01 << 3 = 0100 1000
*/
RCC->APB2ENR |= 0x01 << 6; // GPIOE 组使能
RCC->APB2ENR |= 0x01 << 3; // GPIOB 组使能
/*
2. 配置 GPIOB --> PB5 和 GPIOE --> PE5 对应工作模式
为【推挽输出模式】。二进制为效果为 0011 (CNF=00, MODE=11)
需要配置 GPIOx_CRL 位 23:20 对应 CNF5 和 MODE5 因为
GPIOx_CRL 默认值是 0x44444444 存在基础数据
*/
/*
2.1 对 GPIOx_CRL 位 23:20 默认数据进行擦除。
0x0F ==> 0000 1111
0x0F << 20 ==> 对应位23-20
~(0x0F << 20) ==> 清除掩码
*/
GPIOB->CRL &= ~(0x0F << 20);
GPIOE->CRL &= ~(0x0F << 20);
/*
2.2 对 GPIOx_CRL 位 23:20 进行数据赋值 0011
推挽输出模式配置: CNF=00, MODE=11 (50MHz)
*/
GPIOB->CRL |= 0x03 << 20;
GPIOE->CRL |= 0x03 << 20;
/*
3. 控制高低电平,从而控制 LED 亮和灭
MCU 引脚输出高电平 LED 灯灭
MCU 引脚输出低电平 LED 灯亮
GPIOx_ODR 控制位 5 对应 PB5 和 PE5 两个引脚
对应 ODR 位 5 数据为 1 高电平,0 低电平
*/
while (1)
{
GPIOB->ODR &= ~(0x01 << 5); // PB5 低电平 LED0 灯亮
GPIOE->ODR |= (0x01 << 5); // PE5 高电平 LED1 灯灭
Led_Delay(200000);
GPIOB->ODR |= (0x01 << 5); // PB5 高电平 LED0 灯灭
GPIOE->ODR &= ~(0x01 << 5); // PE5 低电平 LED1 灯亮
Led_Delay(200000);
}
}
// 延时函数
void Led_Delay(u32 tim)
{
while (tim--)
{
for (int i = 0; i < 72; i++)
{
// 空循环,用于延时调整
}
}
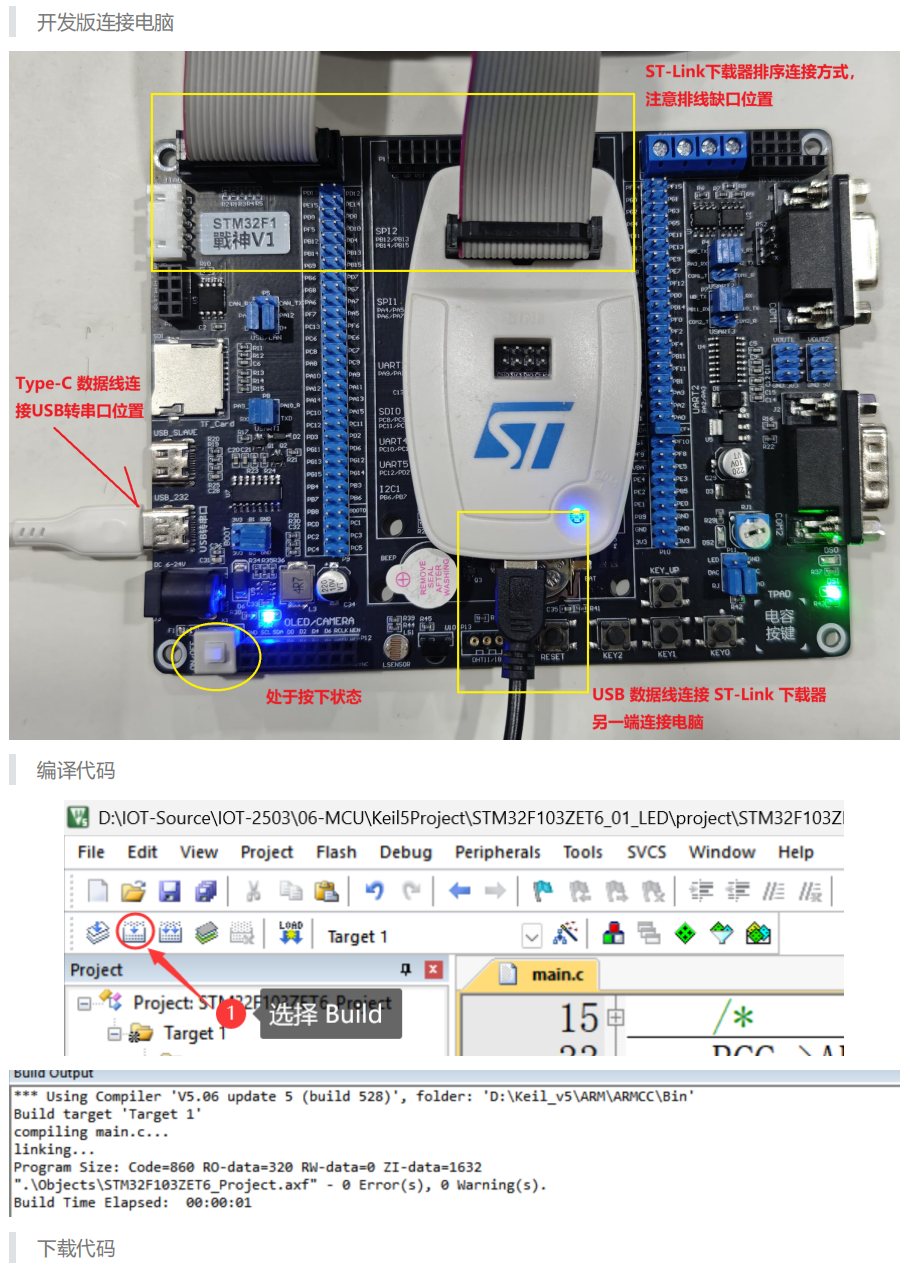
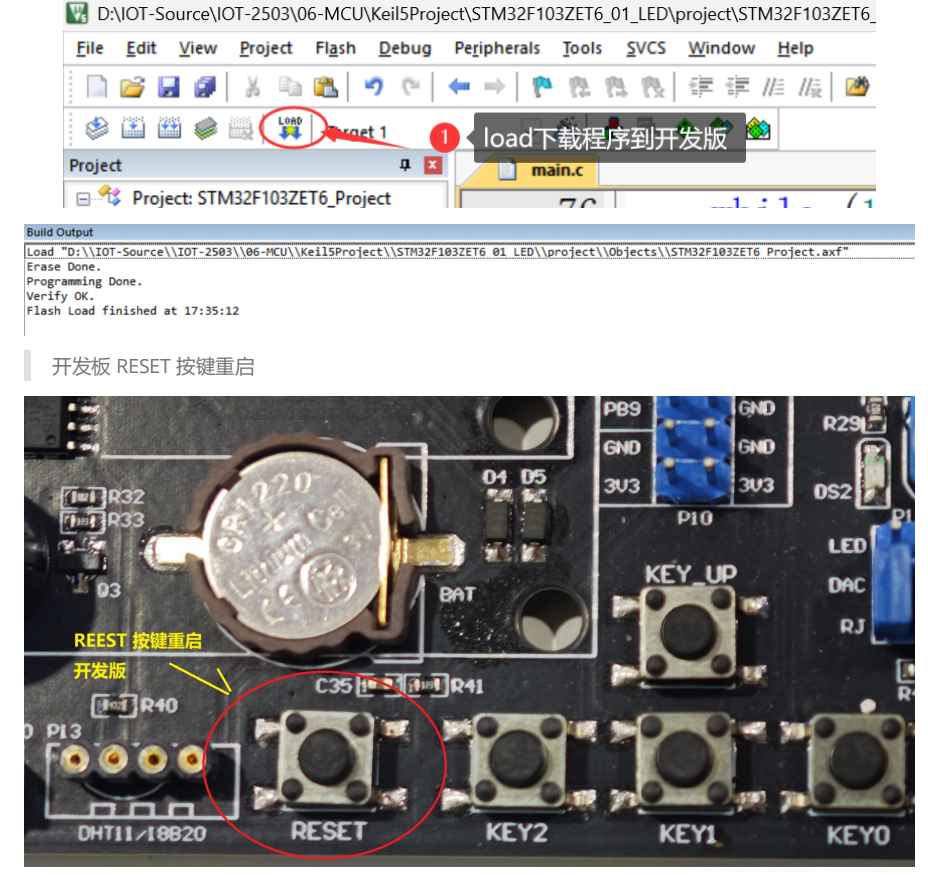
}2.4.8****代码编译和烧录