📘 【STM32】CubeMX(十二):FreeRTOS 消息队列数据收发详解
这篇文章主要介绍 使用 STM32 + HAL 库 + FreeRTOS 消息队列 实现任务间通信的完整过程。
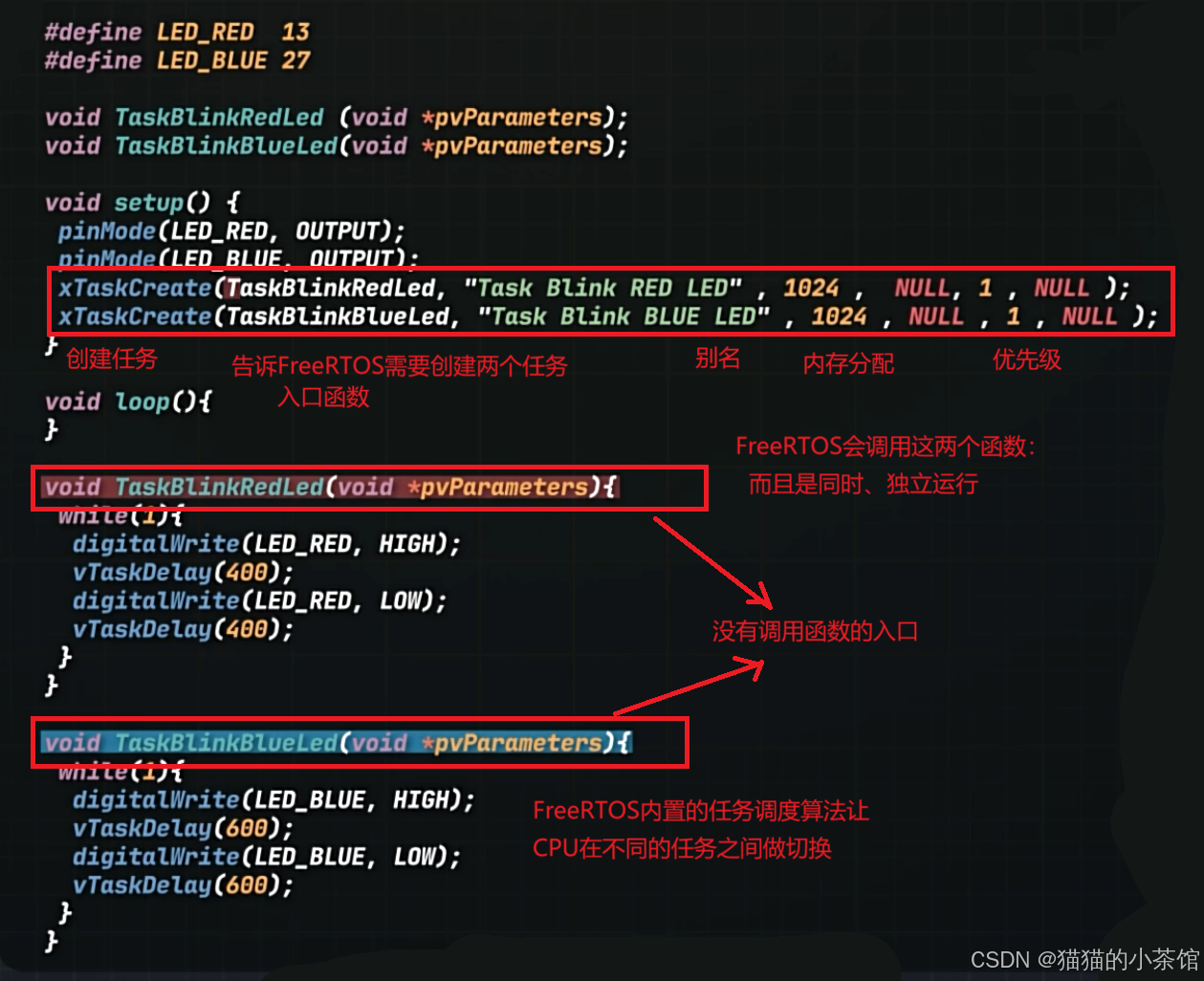
在freeRTOS除了多线程之外,主要就是辅助单核的CPU解决任务之间的交互的问题。针对不同的应用场景,freeRTOS提供了4种不同的交互方式:消息队列,任务通知,信号量和互斥锁。我们这里主要介绍消息队列的使用方式。
一、什么是 FreeRTOS 消息队列?
FreeRTOS 消息队列(Message Queue)是一种任务间通信机制,这种机制主要用于:
| 功能 | 说明 |
|---|---|
| 任务间传递数据 | 类似邮箱或信箱,一个任务放入数据,另一个读取 |
| 实现异步事件处理 | 比如按键中断 → 发送队列 → 任务中处理 |
| 支持中断发送 | 可在中断中使用 xQueueSendFromISR |
| 多任务安全 | 内核自动调度,无需手动加锁 |
FreeRTOS中的消息队列机制:
FreeRTOS 提供的功能的详细说明也都可以在官方文档手册上找到

🛠️ 二、CubeMX 配置流程说明
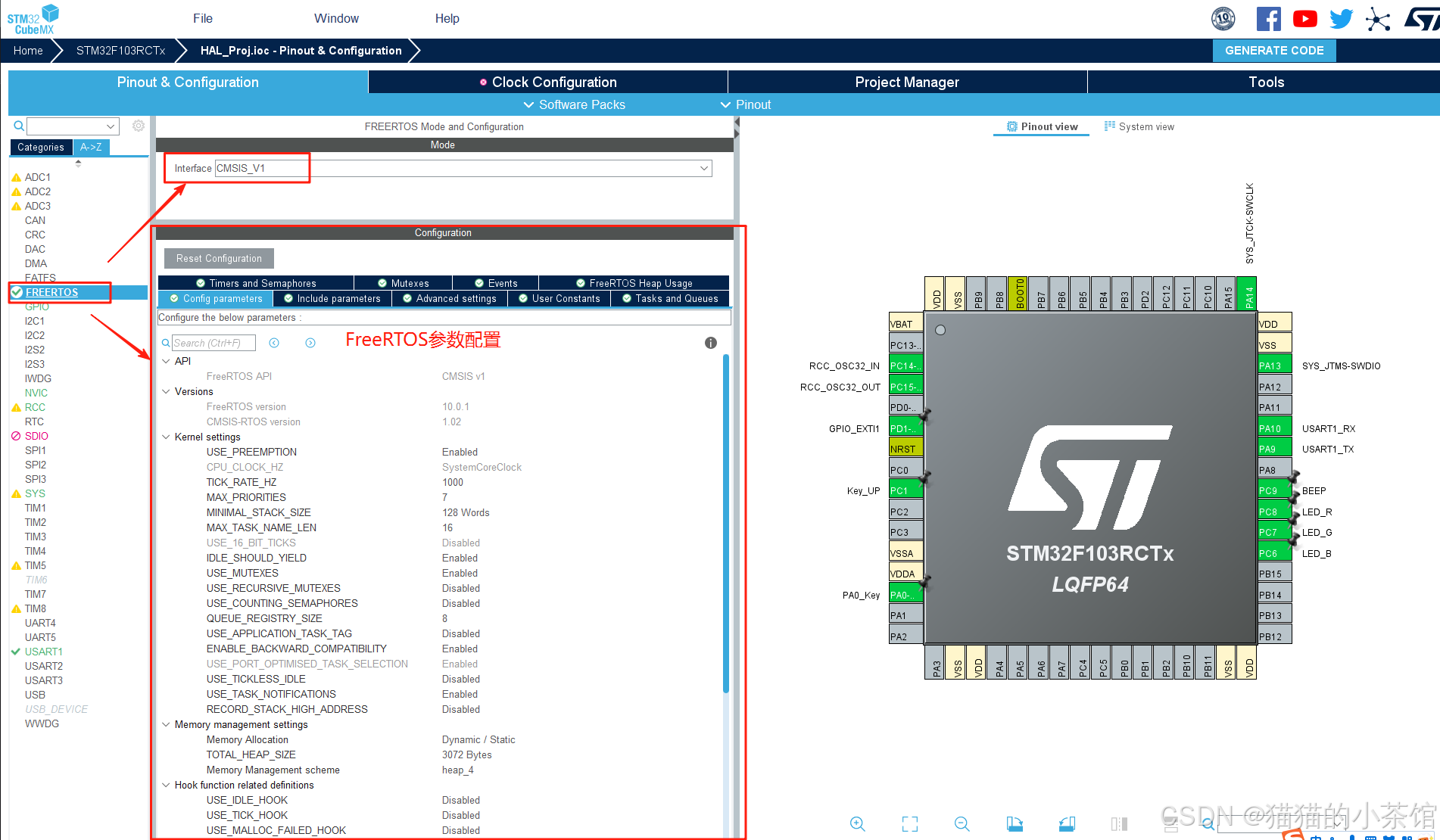
✅ 步骤 1:启用 FreeRTOS
在【Software Packs】中勾选
X-CUBE-FREERTOS
选择 CMSIS_V1 接口
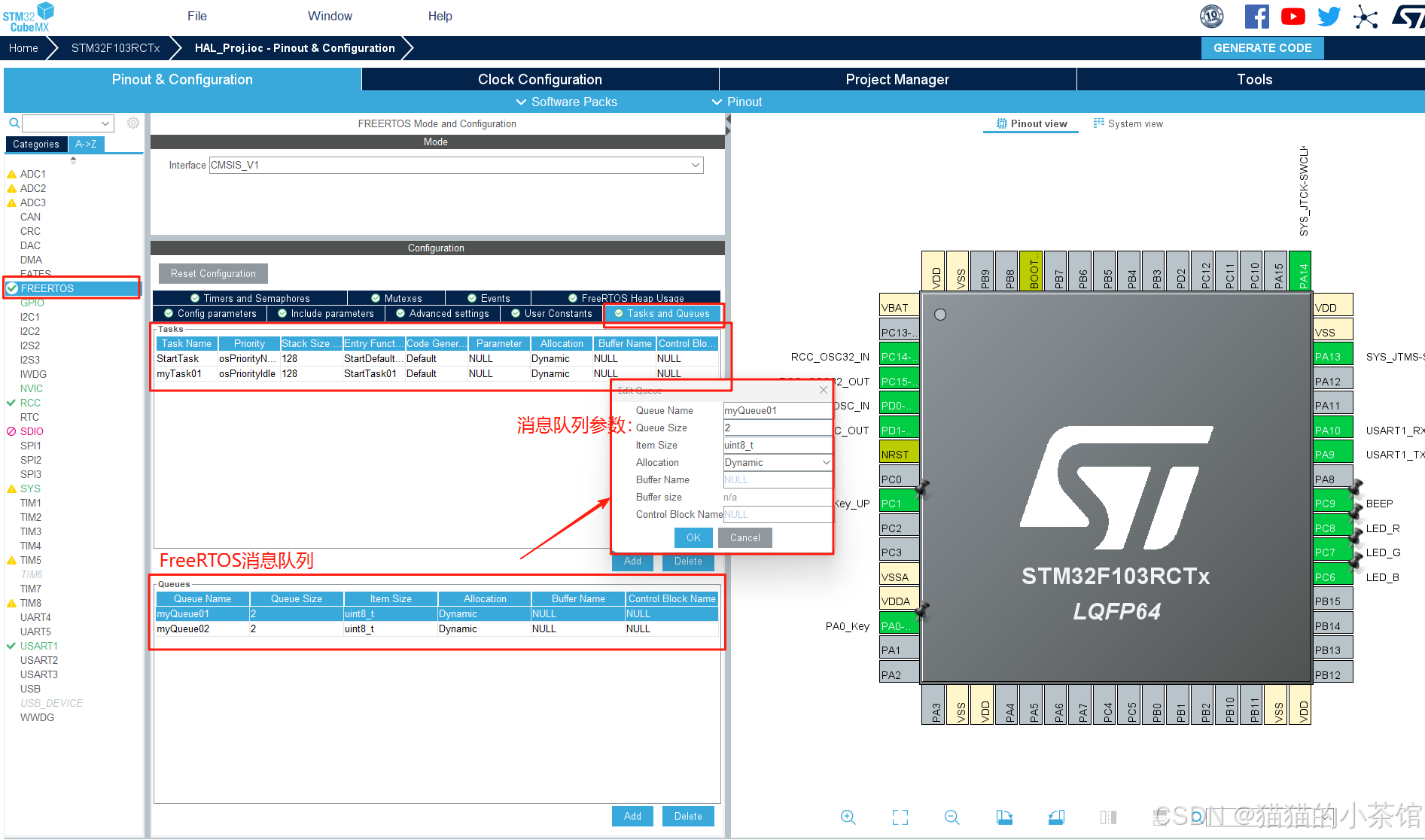
✅ 步骤 2:配置消息队列
在**【Tasks and Queues → Queues】**中添加两个队列:
| Queue 名称 | 队列长度 | 单个元素大小 |
|---|---|---|
| myQueue01 | 2 | uint8_t |
| myQueue02 | 2 | uint8_t |
✅ 步骤 3:配置任务
- StartDefaultTask → 发送 myQueue01 数据
myTask01→ 接收myQueue01 / myQueue02数据
🧩 三、代码结构说明(按模块分类)(提供完整代码示例)
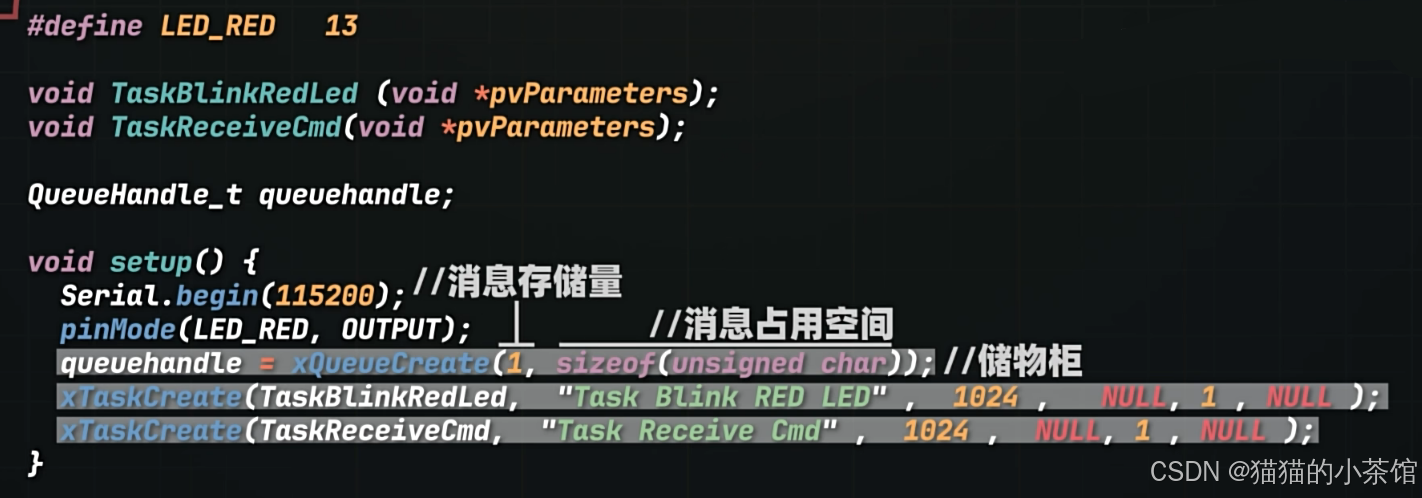
✅ 1️⃣ 消息队列创建(freertos.c)
c
osMessageQDef(myQueue01, 2, uint8_t);
myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);
osMessageQDef(myQueue02, 2, uint8_t);
myQueue02Handle = osMessageCreate(osMessageQ(myQueue02), NULL);✅ 2️⃣ 任务发送 myQueue01(StartDefaultTask)
c
if (Trg_Flag == 1)
{
xQueueSend(myQueue01Handle, &Trg, 10);
printf("myQueue01 is Send!\r\n");
Trg_Flag = 0;
}触发条件:读取 GPIO(PC1)按键状态变化。
✅ 3️⃣ 中断中发送 myQueue02(stm32f1xx_it.c)
c
xQueueSendFromISR(myQueue02Handle, &SendKey, &pxHigherPriorityTaskWoken);触发条件:PA0 外部中断
作用:在中断中向队列发送数据(无需等待)
✅ 4️⃣ 任务接收(myTask01)
c
if(xQueueReceive(myQueue01Handle, &Key, 10) == pdPASS)
{
printf("Recv Queue01 Key = %d\r\n", Key);
}
if(xQueueReceive(myQueue02Handle, &Key_PA0, 10) == pdPASS)
{
printf("Recv Queue01 Key_PA0 = %d\r\n", Key_PA0);
}效果:只要有按键触发,中断或任务就能向队列发送,任务 myTask01 就能收到。
完整代码
📄 main.c
c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "cmsis_os.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "string.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
void MX_FREERTOS_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
HAL_UARTEx_ReceiveToIdle_IT( &huart1 , U1RxData, U1RxDataSize);
/* USER CODE END 2 */
/* Call init function for freertos objects (in freertos.c) */
MX_FREERTOS_Init();
/* Start scheduler */
osKernelStart();
/* We should never get here as control is now taken by the scheduler */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief Period elapsed callback in non blocking mode
* @note This function is called when TIM6 interrupt took place, inside
* HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment
* a global variable "uwTick" used as application time base.
* @param htim : TIM handle
* @retval None
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
/* USER CODE BEGIN Callback 0 */
/* USER CODE END Callback 0 */
if (htim->Instance == TIM6) {
HAL_IncTick();
}
/* USER CODE BEGIN Callback 1 */
/* USER CODE END Callback 1 */
}
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */📄 main.h
c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.h
* @brief : Header for main.c file.
* This file contains the common defines of the application.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Define to prevent recursive inclusion -------------------------------------*/
#ifndef __MAIN_H
#define __MAIN_H
#ifdef __cplusplus
extern "C" {
#endif
/* Includes ------------------------------------------------------------------*/
#include "stm32f1xx_hal.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "FreeRTOS.h"
#include "task.h"
#include "cmsis_os.h"
/* USER CODE END Includes */
/* Exported types ------------------------------------------------------------*/
/* USER CODE BEGIN ET */
/* USER CODE END ET */
/* Exported constants --------------------------------------------------------*/
/* USER CODE BEGIN EC */
/* USER CODE END EC */
/* Exported macro ------------------------------------------------------------*/
/* USER CODE BEGIN EM */
/* USER CODE END EM */
/* Exported functions prototypes ---------------------------------------------*/
void Error_Handler(void);
/* USER CODE BEGIN EFP */
/* USER CODE END EFP */
/* Private defines -----------------------------------------------------------*/
#define Key_UP_Pin GPIO_PIN_1
#define Key_UP_GPIO_Port GPIOC
#define PA0_Key_Pin GPIO_PIN_0
#define PA0_Key_GPIO_Port GPIOA
#define PA0_Key_EXTI_IRQn EXTI0_IRQn
#define LED_B_Pin GPIO_PIN_6
#define LED_B_GPIO_Port GPIOC
#define LED_G_Pin GPIO_PIN_7
#define LED_G_GPIO_Port GPIOC
#define LED_R_Pin GPIO_PIN_8
#define LED_R_GPIO_Port GPIOC
#define BEEP_Pin GPIO_PIN_9
#define BEEP_GPIO_Port GPIOC
/* USER CODE BEGIN Private defines */
extern osMessageQId myQueue01Handle;
extern osMessageQId myQueue02Handle;
/* USER CODE END Private defines */
#ifdef __cplusplus
}
#endif
#endif /* __MAIN_H */📄 stm32f1xx_it.c
c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file stm32f1xx_it.c
* @brief Interrupt Service Routines.
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "stm32f1xx_it.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
#include "FreeRTOS.h"
#include "task.h"
#include "cmsis_os.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN TD */
/* USER CODE END TD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/* External variables --------------------------------------------------------*/
extern UART_HandleTypeDef huart1;
extern TIM_HandleTypeDef htim6;
/* USER CODE BEGIN EV */
/* USER CODE END EV */
/******************************************************************************/
/* Cortex-M3 Processor Interruption and Exception Handlers */
/******************************************************************************/
/**
* @brief This function handles Non maskable interrupt.
*/
void NMI_Handler(void)
{
/* USER CODE BEGIN NonMaskableInt_IRQn 0 */
/* USER CODE END NonMaskableInt_IRQn 0 */
/* USER CODE BEGIN NonMaskableInt_IRQn 1 */
while (1)
{
}
/* USER CODE END NonMaskableInt_IRQn 1 */
}
/**
* @brief This function handles Hard fault interrupt.
*/
void HardFault_Handler(void)
{
/* USER CODE BEGIN HardFault_IRQn 0 */
/* USER CODE END HardFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_HardFault_IRQn 0 */
/* USER CODE END W1_HardFault_IRQn 0 */
}
}
/**
* @brief This function handles Memory management fault.
*/
void MemManage_Handler(void)
{
/* USER CODE BEGIN MemoryManagement_IRQn 0 */
/* USER CODE END MemoryManagement_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_MemoryManagement_IRQn 0 */
/* USER CODE END W1_MemoryManagement_IRQn 0 */
}
}
/**
* @brief This function handles Prefetch fault, memory access fault.
*/
void BusFault_Handler(void)
{
/* USER CODE BEGIN BusFault_IRQn 0 */
/* USER CODE END BusFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_BusFault_IRQn 0 */
/* USER CODE END W1_BusFault_IRQn 0 */
}
}
/**
* @brief This function handles Undefined instruction or illegal state.
*/
void UsageFault_Handler(void)
{
/* USER CODE BEGIN UsageFault_IRQn 0 */
/* USER CODE END UsageFault_IRQn 0 */
while (1)
{
/* USER CODE BEGIN W1_UsageFault_IRQn 0 */
/* USER CODE END W1_UsageFault_IRQn 0 */
}
}
/**
* @brief This function handles Debug monitor.
*/
void DebugMon_Handler(void)
{
/* USER CODE BEGIN DebugMonitor_IRQn 0 */
/* USER CODE END DebugMonitor_IRQn 0 */
/* USER CODE BEGIN DebugMonitor_IRQn 1 */
/* USER CODE END DebugMonitor_IRQn 1 */
}
/******************************************************************************/
/* STM32F1xx Peripheral Interrupt Handlers */
/* Add here the Interrupt Handlers for the used peripherals. */
/* For the available peripheral interrupt handler names, */
/* please refer to the startup file (startup_stm32f1xx.s). */
/******************************************************************************/
/**
* @brief This function handles EXTI line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
/* USER CODE END EXTI0_IRQn 0 */
HAL_GPIO_EXTI_IRQHandler(PA0_Key_Pin);
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
/**
* @brief This function handles USART1 global interrupt.
*/
void USART1_IRQHandler(void)
{
/* USER CODE BEGIN USART1_IRQn 0 */
/* USER CODE END USART1_IRQn 0 */
HAL_UART_IRQHandler(&huart1);
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}
/**
* @brief This function handles TIM6 global interrupt.
*/
void TIM6_IRQHandler(void)
{
/* USER CODE BEGIN TIM6_IRQn 0 */
/* USER CODE END TIM6_IRQn 0 */
HAL_TIM_IRQHandler(&htim6);
/* USER CODE BEGIN TIM6_IRQn 1 */
/* USER CODE END TIM6_IRQn 1 */
}
/* USER CODE BEGIN 1 */
BaseType_t pxHigherPriorityTaskWoken;
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
uint8_t SendKey = 0;
if(GPIO_Pin == PA0_Key_Pin)
{
if( HAL_GPIO_ReadPin( PA0_Key_GPIO_Port, PA0_Key_Pin) == GPIO_PIN_RESET)
{
SendKey = HAL_GPIO_ReadPin( PA0_Key_GPIO_Port, PA0_Key_Pin);
xQueueSendFromISR(myQueue02Handle,&SendKey,&pxHigherPriorityTaskWoken);
printf("myQueue02 is Send ! \r\n");
if(pxHigherPriorityTaskWoken)
{
portYIELD_FROM_ISR(pxHigherPriorityTaskWoken); //任务切换
}
// HAL_GPIO_TogglePin( LED_G_GPIO_Port, LED_G_Pin );
}
}
}
void HAL_UARTEx_RxEventCallback(UART_HandleTypeDef *huart, uint16_t Size)
{
U1RxLen = Size;
HAL_UARTEx_ReceiveToIdle_IT( &huart1 , U1RxData, U1RxDataSize);
U1RxFlag = 1;
}
/* USER CODE END 1 */📄 freertos.c
c
/* USER CODE BEGIN Header */
/**
******************************************************************************
* File Name : freertos.c
* Description : Code for freertos applications
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "FreeRTOS.h"
#include "task.h"
#include "main.h"
#include "cmsis_os.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN Variables */
/* USER CODE END Variables */
osThreadId StartTaskHandle;
osThreadId myTask01Handle;
osMessageQId myQueue01Handle;
osMessageQId myQueue02Handle;
/* Private function prototypes -----------------------------------------------*/
/* USER CODE BEGIN FunctionPrototypes */
/* USER CODE END FunctionPrototypes */
void StartDefaultTask(void const * argument);
void StartTask01(void const * argument);
void MX_FREERTOS_Init(void); /* (MISRA C 2004 rule 8.1) */
/* GetIdleTaskMemory prototype (linked to static allocation support) */
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize );
/* USER CODE BEGIN GET_IDLE_TASK_MEMORY */
static StaticTask_t xIdleTaskTCBBuffer;
static StackType_t xIdleStack[configMINIMAL_STACK_SIZE];
void vApplicationGetIdleTaskMemory( StaticTask_t **ppxIdleTaskTCBBuffer, StackType_t **ppxIdleTaskStackBuffer, uint32_t *pulIdleTaskStackSize )
{
*ppxIdleTaskTCBBuffer = &xIdleTaskTCBBuffer;
*ppxIdleTaskStackBuffer = &xIdleStack[0];
*pulIdleTaskStackSize = configMINIMAL_STACK_SIZE;
/* place for user code */
}
/* USER CODE END GET_IDLE_TASK_MEMORY */
/**
* @brief FreeRTOS initialization
* @param None
* @retval None
*/
void MX_FREERTOS_Init(void) {
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* USER CODE BEGIN RTOS_MUTEX */
/* add mutexes, ... */
/* USER CODE END RTOS_MUTEX */
/* USER CODE BEGIN RTOS_SEMAPHORES */
/* add semaphores, ... */
/* USER CODE END RTOS_SEMAPHORES */
/* USER CODE BEGIN RTOS_TIMERS */
/* start timers, add new ones, ... */
/* USER CODE END RTOS_TIMERS */
/* Create the queue(s) */
/* definition and creation of myQueue01 */
osMessageQDef(myQueue01, 2, uint8_t);
myQueue01Handle = osMessageCreate(osMessageQ(myQueue01), NULL);
/* definition and creation of myQueue02 */
osMessageQDef(myQueue02, 2, uint8_t);
myQueue02Handle = osMessageCreate(osMessageQ(myQueue02), NULL);
/* USER CODE BEGIN RTOS_QUEUES */
/* add queues, ... */
/* USER CODE END RTOS_QUEUES */
/* Create the thread(s) */
/* definition and creation of StartTask */
osThreadDef(StartTask, StartDefaultTask, osPriorityNormal, 0, 128);
StartTaskHandle = osThreadCreate(osThread(StartTask), NULL);
/* definition and creation of myTask01 */
osThreadDef(myTask01, StartTask01, osPriorityHigh, 0, 128);
myTask01Handle = osThreadCreate(osThread(myTask01), NULL);
/* USER CODE BEGIN RTOS_THREADS */
/* add threads, ... */
/* USER CODE END RTOS_THREADS */
}
/* USER CODE BEGIN Header_StartDefaultTask */
/**
* @brief Function implementing the StartTask thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartDefaultTask */
void StartDefaultTask(void const * argument)
{
/* USER CODE BEGIN StartDefaultTask */
// static uint16_t KeyTime = 0;
// static bool KeyFlag = 0;
printf("StartDefaultTask is Run ! \r\n");
static unsigned char Trg = 0;
static unsigned char Cont = 0xFF;
uint8_t Trg_Flag = 0;
/* Infinite loop */
for(;;)
{
unsigned char ReadData = HAL_GPIO_ReadPin( GPIOC, GPIO_PIN_1)^0xff; // 1
Trg = ReadData & (ReadData ^ Cont); // 2
Cont = ReadData;
if( Trg == 1)
{
Trg_Flag = 1;
}
if(Trg_Flag == 1)
{
xQueueSend(myQueue01Handle,&Trg,(TickType_t) 10);
printf("myQueue01 is Send ! \r\n");
Trg_Flag = 0;
}
osDelay(1);
}
/* USER CODE END StartDefaultTask */
}
/* USER CODE BEGIN Header_StartTask01 */
/**
* @brief Function implementing the myTask01 thread.
* @param argument: Not used
* @retval None
*/
/* USER CODE END Header_StartTask01 */
void StartTask01(void const * argument)
{
/* USER CODE BEGIN StartTask01 */
printf("StartTask01 is Run ! \r\n");
uint8_t Key = 0;
uint8_t Key_PA0 = 0;
/* Infinite loop */
for(;;)
{
if(xQueueReceive( myQueue01Handle,&(Key),(TickType_t) 10) == pdPASS)
{
printf("Recv Queue01 Key = %d \r\n",Key);
// HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin);
}
if(xQueueReceive( myQueue02Handle,&(Key_PA0),(TickType_t) 10) == pdPASS)
{
printf("Recv Queue01 Key_PA0 = %d \r\n",Key_PA0);
// HAL_GPIO_TogglePin(LED_B_GPIO_Port, LED_B_Pin);
}
osDelay(1);
}
/* USER CODE END StartTask01 */
}
/* Private application code --------------------------------------------------*/
/* USER CODE BEGIN Application */
/* USER CODE END Application */四、串口调试效果
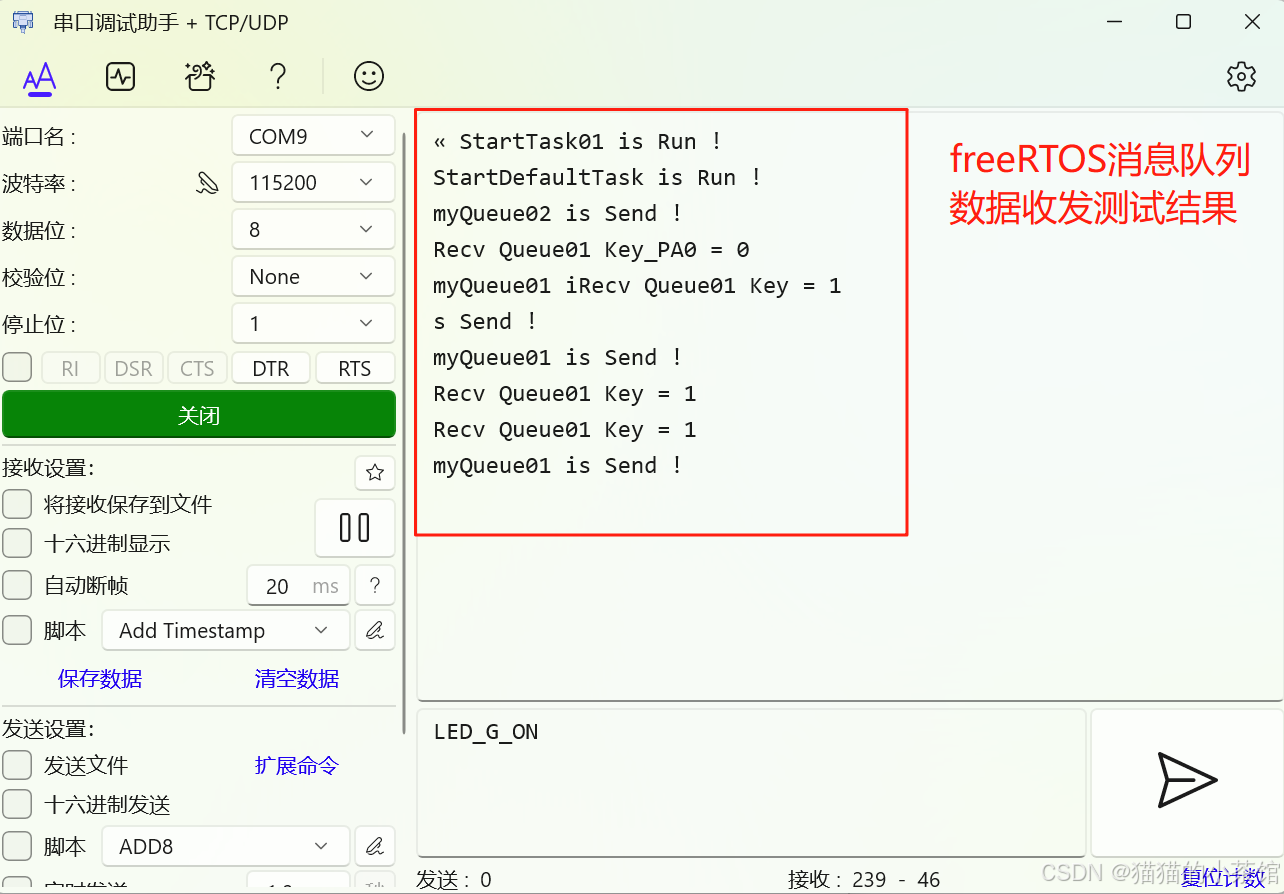
输出内容示例:
c
StartDefaultTask is Run!
StartTask01 is Run!
myQueue02 is Send!
Recv Queue01 Key_PA0 = 0
myQueue01 is Send!
Recv Queue01 Key = 1✅ 说明:
myQueue01→ 来自轮询任务的按键输入
myQueue02→ 来自中断的按键输入
myTask01→ 成功接收到并打印
五、FreeRTOS 消息队列使用总结
| 操作 | 函数 | 说明 |
|---|---|---|
| 创建队列 | osMessageCreate() |
CubeMX 自动生成 |
| 发送数据 | xQueueSend() |
普通任务中使用 |
| 发送(中断) | xQueueSendFromISR() |
中断中使用 |
| 接收数据 | xQueueReceive() |
通常在任务中阻塞接收 |
| 队列满 | 返回 errQUEUE_FULL |
可设置超时 |
| 队列空 | 返回 pdFALSE |
可设置阻塞等待时间 |
队列结构:
c
[任务A] --xQueueSend()--> [消息队列] --xQueueReceive()--> [任务B]
[中断] --xQueueSendFromISR()--> [消息队列] --> [任务B]队列就像一个 "中转仓库" ,异步解耦任务之间通信。
以上。这便是 FreeRTOS 消息队列是 STM32 多任务系统中最常用的通信机制,适用于任务间、任务与中断之间的安全、可靠、非阻塞数据传输。
以上,欢迎有从事同行业的电子信息工程、互联网通信、嵌入式开发的朋友共同探讨与提问,我可以提供实战演示或模板库。希望内容能够对你产生帮助!