MotionXpert: EMG-Based Classification for Optimized Lower-Limb Motion Detection
原文:DOI: 10.1109/IECBES61011.2024.10990475
2024年
翻译:靠岸学术
目录
[A. 数据采集](#A. 数据采集)
[B. 实验规程](#B. 实验规程)
[C. 数据预处理和特征提取](#C. 数据预处理和特征提取)
[D. 机器学习技术](#D. 机器学习技术)
[A. 分类结果](#A. 分类结果)
[B. 特征重要性](#B. 特征重要性)
[C. 可行性研究与应用](#C. 可行性研究与应用)
[D. 局限性](#D. 局限性)
[E. 未来方向](#E. 未来方向)
摘要
Advances in surface electromyography (sEMG) signals have demonstrated significant promise for controlling exoskeletons used in gait analysis and rehabilitation. However, little is known about the optimal sEMG placement and feature selection for lower-limb classification, particularly for classifying standing and sitting movements. This study investigates the effectiveness of different sEMG electrode placements and feature sets in classifying the actions of standing and sitting using machine learning (ML) algorithms. We collected data from 22 subjects and applied noise reduction techniques before employing k-nearest neighbors classifiers, random forest, and support vector machine. Our findings show that the random forest model, using a combination of time-domain and frequency-domain features, achieved the highest F1-score (87.80 ± 5.11%). Furthermore, the results indicate that the use of the random forest with EMG signals from the rectus femoris (RF) muscle yielded the highest classification performance in terms of F1-score (82.67 ± 8.05%). This finding demonstrates the potential of using optimal configurations in the placement of EMG electrodes and feature sets for developing future exoskeleton-based rehabilitation applications.
Index Terms---Electromyography (EMG), lower-limb classification, machine learning (ML), exoskeleton control, gait analysis
表面肌电图(sEMG)信号的进展已显示出在控制用于步态分析和康复的外骨骼方面的巨大潜力。然而,对于下肢分类的最佳sEMG放置和特征选择知之甚少,特别是对于站立和坐姿动作的分类。本研究调查了不同sEMG电极放置和特征集在使用机器学习(ML)算法对站立和坐姿动作进行分类时的有效性。我们收集了来自22名受试者的数据,并在采用k近邻分类器、随机森林和支持向量机之前应用了降噪技术。我们的研究结果表明,使用时域和频域特征组合的随机森林模型获得了最高的F1分数(87.80 ± 5.11%)。此外,结果表明,使用来自股直肌(RF)肌肉的EMG信号的随机森林在F1分数方面产生了最高的分类性能(82.67 ± 8.05%)。这一发现证明了在EMG电极放置和特征集中使用最佳配置在开发未来基于外骨骼的康复应用中的潜力。
索引词---肌电图(EMG),下肢分类,机器学习(ML),外骨骼控制,步态分析
1介绍
外骨骼是一种可穿戴的机器人系统,能够适应人体生理机能,提供多种功能,如运动辅助、假肢控制和康复1--3。理解用户的运动意图对于这些外骨骼有效辅助或替代肢体至关重要。在此,肌电图(EMG)信号发挥着重要作用,它能够捕捉肌肉的电活动,为用户运动意图提供直接和实时的窗口4。EMG具有多种优势,因为它能够提前识别运动,并且使用表面肌电图(sEMG)具有非侵入性5,6。这项技术作为先进的假肢或康复工具,对于提高残疾人士的生活质量具有重要意义。
近年来,上肢表面肌电信号(sEMG)的应用在研究人员中变得越来越受欢迎;然而,下肢的应用对于诸如坐、站和走等基本日常活动也至关重要。这些任务对于依赖假肢或外骨骼来恢复行动能力的残疾人士至关重要。这些系统不仅有助于恢复运动,还旨在提高用户的独立性和生活质量7,8。
尽管近年来下肢表面肌电信号(sEMG)研究取得了进展,但由于影响信号的各种因素之间复杂的相互作用,仍然存在重大挑战。这些挑战包括在多个运动单元放电的情况下获取干净的信号,以及神经肌肉活动、肌肉特性和身体位置的影响 9。先前在下肢表面肌电信号(sEMG)方面的多项研究探索了各种方法,包括 Christopher 等人研究使用表面肌电信号(sEMG)通过卷积神经网络(CNN)分类步态障碍 10,使用小波分解和集合经验模态分解(WD-EEMD)进行坐-站-走检测的混合特征提取 11,使用遗传算法结合时域和频域的多种信号特征来帮助分类下肢 12,用于步态分类的脑电-肌电(EEG-EMG)集成 13,以及结合卷积神经网络和循环神经网络(CNN-RNN)以提高步态分类性能 14。然而,关于坐姿和站姿的最佳电极放置位置,以及最有效的分类特征,仍然存在疑问。
为了解决上述问题,本研究做出了两个主要贡献。首先,我们使用传统的机器学习算法对下肢肌电信号进行三分类,以区分休息、坐姿和站立动作。我们评估了时域和频域特征提取技术,以确定最有效的分类方法。其次,我们确定了最佳的sEMG电极放置位置以及信息量最大的特征,以便对过渡运动(如站到坐(坐姿)和坐到站(站姿))进行稳健分类。这些贡献旨在提高基于肌电信号的外骨骼和假肢的准确性和可用性,以帮助残疾人士。
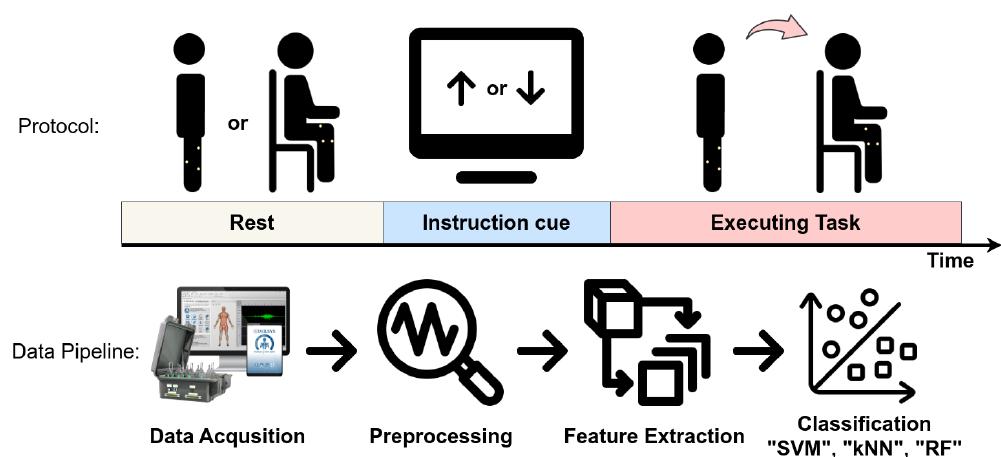
图1. 本研究概述
2方法
正如研究概述和图1所示的协议中所述,本节详细介绍了我们的数据采集过程,然后介绍了从数据中预处理和提取特征的步骤,最后介绍了我们应用的机器学习技术。

图2. 红色十字标记分别表示EMG电极在SL、TA和RF上的放置位置。15
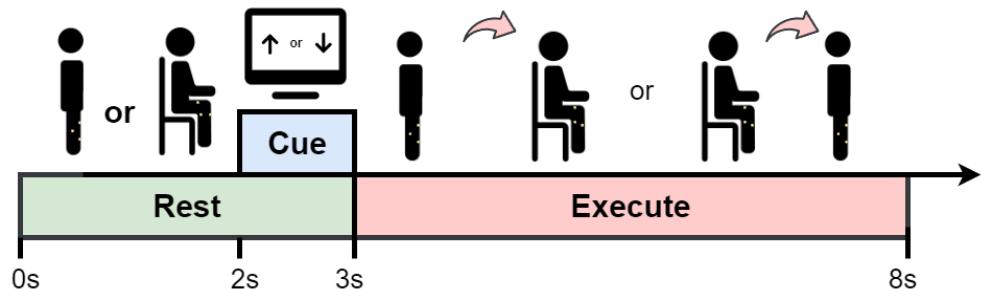
图 3. 实验方案中单个试验的时间线。显示了 2 种状态:静息(0-3 秒)和坐姿或站姿(3-8 秒)。
A. 数据采集
本研究招募了22名健康的参与者(15名男性和7名女性,平均年龄为24.81岁),他们没有神经系统疾病、脑部手术或运动障碍的病史。在获得书面知情同意书之前,所有参与者都收到了关于实验和任何潜在风险的详细解释。实验程序遵守1975年《赫尔辛基宣言》及其2000年的后续修订版中概述的原则。该研究获得了泰国苏兰拉里科技大学伦理委员会的批准(EC-65-0031)。
我们的数据采集系统专注于使用六个表面肌电图(EMG)传感器(Trigno Avanti Sensor,Delsys,USA)捕捉坐立动作期间的肌肉活动。这些传感器按照SENIAM 15推荐的协议连接到双腿的比目鱼肌(SL)、胫骨前肌(TA)和股直肌(RF),如图2所示。EMG数据以2000 Hz的采样率采集。
B. 实验规程
实验开始时,参与者舒适地坐在椅子上,双脚平放在地板上。一个大型65英寸的电视监视器,放置在5米远的地方,在整个实验过程中显示视觉提示。参与者被指示保持放松,不要移动,以确保他们不会错过指示。每个试验持续16秒,包括8秒的坐姿和8秒的站姿。试验开始时,首先呈现一个2秒的注视十字,然后是一个1秒的视觉提示(向上或向下箭头),指示所需的动作(站立或坐下)。短暂的1秒后,出现5秒的空白屏幕,提示参与者执行指示的动作。试验以另一个2秒的注视十字、一个1秒的白色圆圈和最后的5秒休息期结束,然后循环回到开始,总共进行20次试验,如图3所示。
C. 数据预处理和特征提取
在我们的实验中,我们使用MNE-python软件包(版本1.6.1)对EMG数据进行信号处理。首先,我们将记录的EMG从2000 Hz降采样到1200 Hz,并应用陷波滤波器以消除50 Hz的电气干扰。接下来,我们使用2阶非因果Butterworth滤波器对15-124 Hz之间的EMG信号进行带通滤波,以排除不相关的EMG模式16。如图3所示,处理后的EMG信号被分割成与每个类别(静息、坐姿和站姿)开始时锁定的epochs。静息EMG信号是在从起始期到提示期结束的时间间隔内选择的,持续3秒。我们使用基于阈值的方法从EMG信号中提取实际的运动开始,识别与坐姿和站姿动作相对应的肌肉活动。为此,我们应用Chaisaen等人16描述的基于阈值的方法来确定每个坐姿和站姿动作的开始。因此,坐姿/站姿运动的EMG信号是在实际运动开始时选择的,并持续3秒。最后,我们对每个3秒epoch中处理后的EMG信号分别进行z-score归一化。采用了两种主要的特征提取策略,如下所示:
- 时域特征:时域特征提取已被广泛用于从 EMG 信号中导出有意义的特征,正如 Fricke et al. 和 Vijayvargiya et al. 10, 11 的工作所证明的那样。这些特征被广泛使用
由于其较低的计算复杂度和在检测肌肉活动、收缩和起始方面的有效性,简单阈值法被用于肌电信号20,21,尤其是在低噪声环境中22。在本研究中,我们从处理后的肌电信号中提取了10个特征,详见表I。
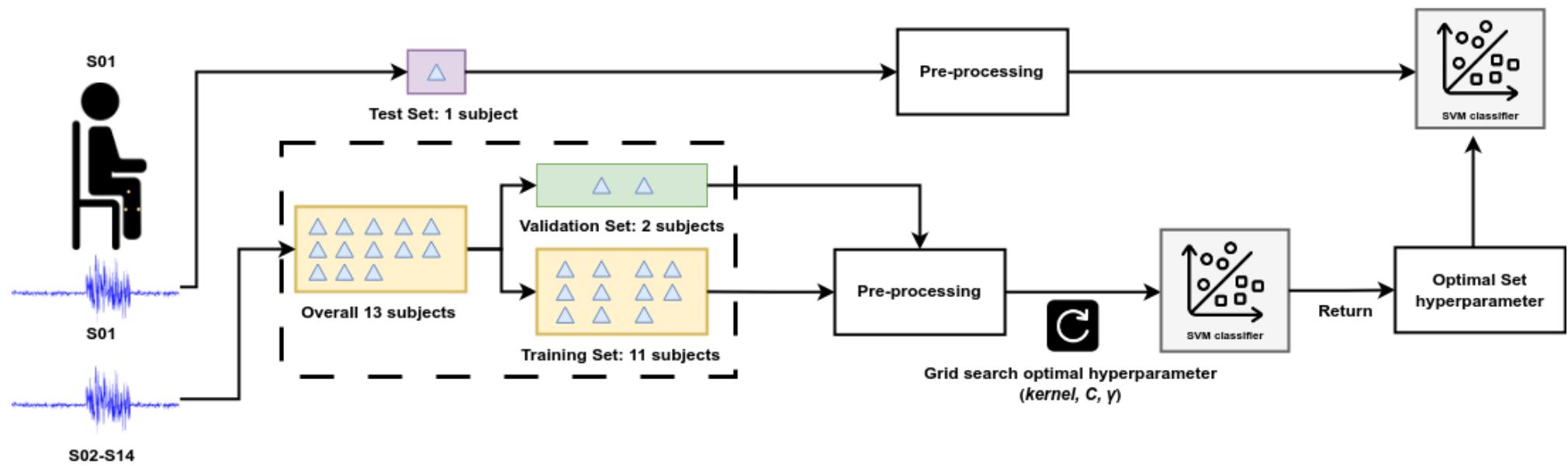
图4. 采用网格搜索算法的留一被试交叉验证(LOSO-CV)框架,用于三分类,独立地对每个被试进行。
表一 基于肌电信号的时域和频域特征列表。
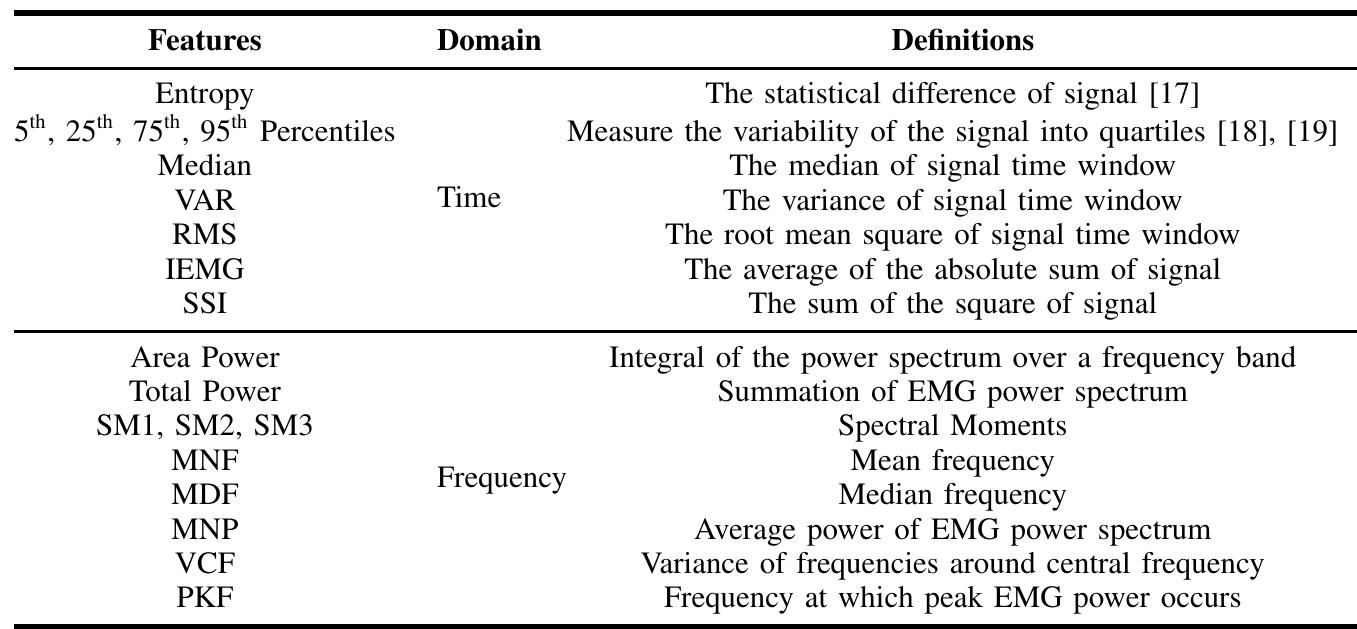
- 频域特征:肌电信号频域中的特征提取通过捕获时域之外的信息,为肌肉功能提供了宝贵的见解。这些特征通常使用功率谱密度(PSD)提取,通过突出潜在的肌肉疲劳和神经异常,提供了补充性的视角21。在本研究中,我们从PSD中提取了10个特征,如表I所示。
D. 机器学习技术
在本研究中,我们利用三种传统的机器学习(ML)技术:k近邻(kNN)、随机森林(RDF)和支持向量机(SVM),基于EMG信号对下肢运动进行分类。我们采用了一种受试者独立的方法,并使用留一受试者法交叉验证(LOSO-CV)。换句话说,数据采用留一法策略进行分割,然后进行分层5折交叉验证,以确保模型能够推广到未见过的数据。然后,使用超参数优化技术GridSearch,如表二所示,调整模型参数,并为所有考虑的分类器找到最佳配置。然后,将具有最佳参数的结果分类器用于评估测试集。最后,我们使用准确率和F1评估了所有分类器。
表二 采用网格搜索算法为kNN、随机森林和SVM优化的超参数汇总。
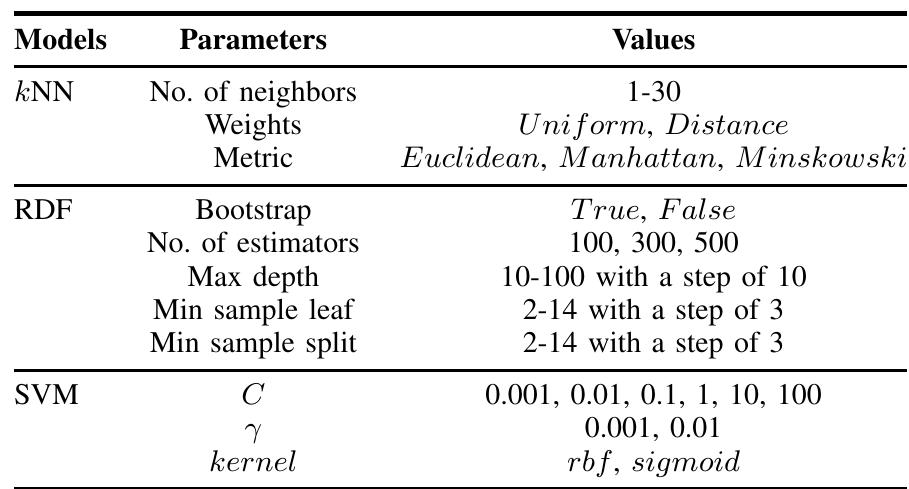
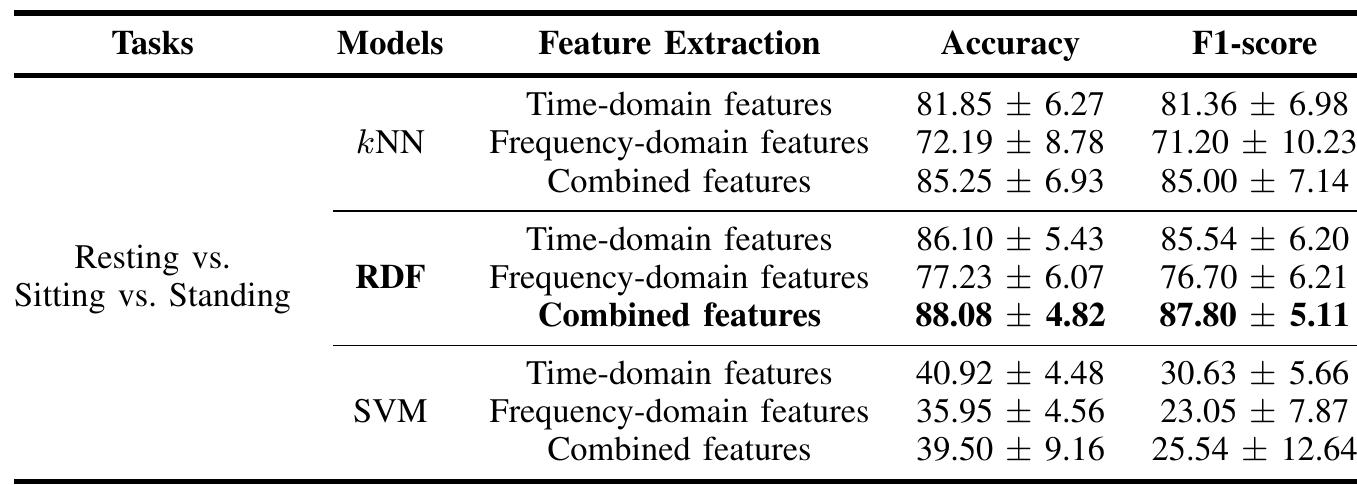
表 III 下肢运动检测的三类 EMG 分类性能(准确率和 F1 分数,表示为 % ± SD)。粗体表示最佳数值。
表四:使用RDF算法,结合时域和频域特征,对不同腿部肌肉进行三类EMG下肢分类的性能表现(准确率±标准差,F1分数±标准差),单位为%。粗体字表示最高的数值。
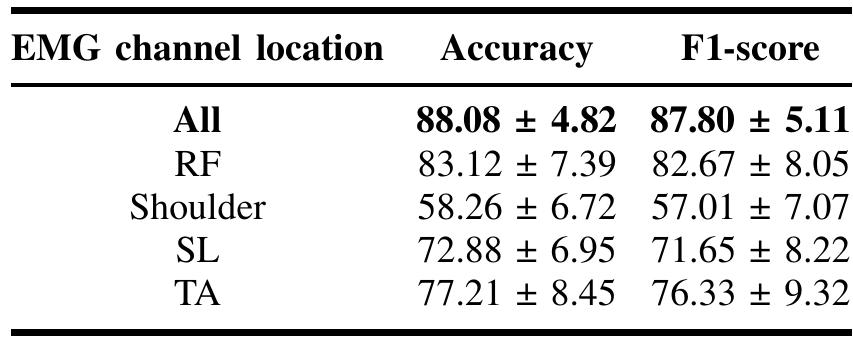
EMG通道位置描述;全部:来自所有腿部肌肉的EMG;RF:来自左右两侧股直肌的EMG;肩部:来自右肩的EMG;SL:来自左右两侧比目鱼肌的EMG;TA:来自左右两侧胫骨前肌的EMG
评分指标,从而能够对其有效性进行全面评估,如图4所示。
3结果与讨论
A. 分类结果
表三展示了所有考虑的方法在基于三类EMG的下肢分类(休息、坐姿、站立)中获得的平均分类性能。结果表明,所有使用时域特征作为输入的机器学习模型都优于使用频域特征的机器学习模型。这一发现表明,来自EMG信号的时域特征比频域特征更有用,这与23一致。此外,我们发现,当在时域和频域特征上训练时,RDF模型获得了最高的分类性能,准确率约为(∼88%),F1分数约为(∼87%)。
从表四的结果来看,研究结果揭示了RDF使用时域和频域特征组合对不同腿部肌肉进行下肢分类的平均性能。可以看出,当在所有腿部肌肉的EMG信号上训练时,RDF模型在准确率和F1分数方面都表现出最佳性能。
有趣的是,与其他肌肉相比,来自股直肌(RF)的肌电图(EMG)信号被证明是最有用的。
B. 特征重要性
图5显示了应用于下肢运动检测的三类EMG分类性能的RDF算法的特征重要性得分。这些分数是使用scikit-learn(版本1.3.2)24计算的。如图5(a)所示,结果表明,时域特征中RF肌肉的第25个百分位数表现出最高的重要性得分。同时,如图5(b)所示,TA肌肉的SM1在频域特征中产生最高的重要性得分。考虑到时域和频域特征的组合,如图5(c)所示,我们发现RF肌肉的第25个百分位数提供了最高的重要性得分。RF肌肉的RMS显示出第二高的重要性得分,紧随其后的是RF肌肉的IEMG。
这一发现表明,与频域特征相比,时域特征对基于EMG的下肢分类具有更大的影响。此外,我们发现整合来自时域和频域的输入特征对于实现最佳分类性能至关重要。最后,我们发现与股直肌(RF)和胫骨前肌(TA)相关的特征似乎比来自其他肌肉的特征对于分类下肢运动更为重要。我们的发现与25、26的研究结果一致,它们指出股直肌(RF)和胫骨前肌(TA)在执行下肢任务期间具有显著影响。
C. 可行性研究与应用
本研究的一个主要目标是调查我们的结果如何能够促进外骨骼和可穿戴机器人系统的设计,这些系统旨在帮助运动障碍人士进行康复。目前,肌电图传感器位置对于步行任务的重要性已被充分证明,股直肌和腓肠肌已被确定为在所有执行这些任务的受试者中平均数据时信息量最大的肌肉13。然而,关于坐立等过渡状态下肌电图传感器位置的研究却很少。
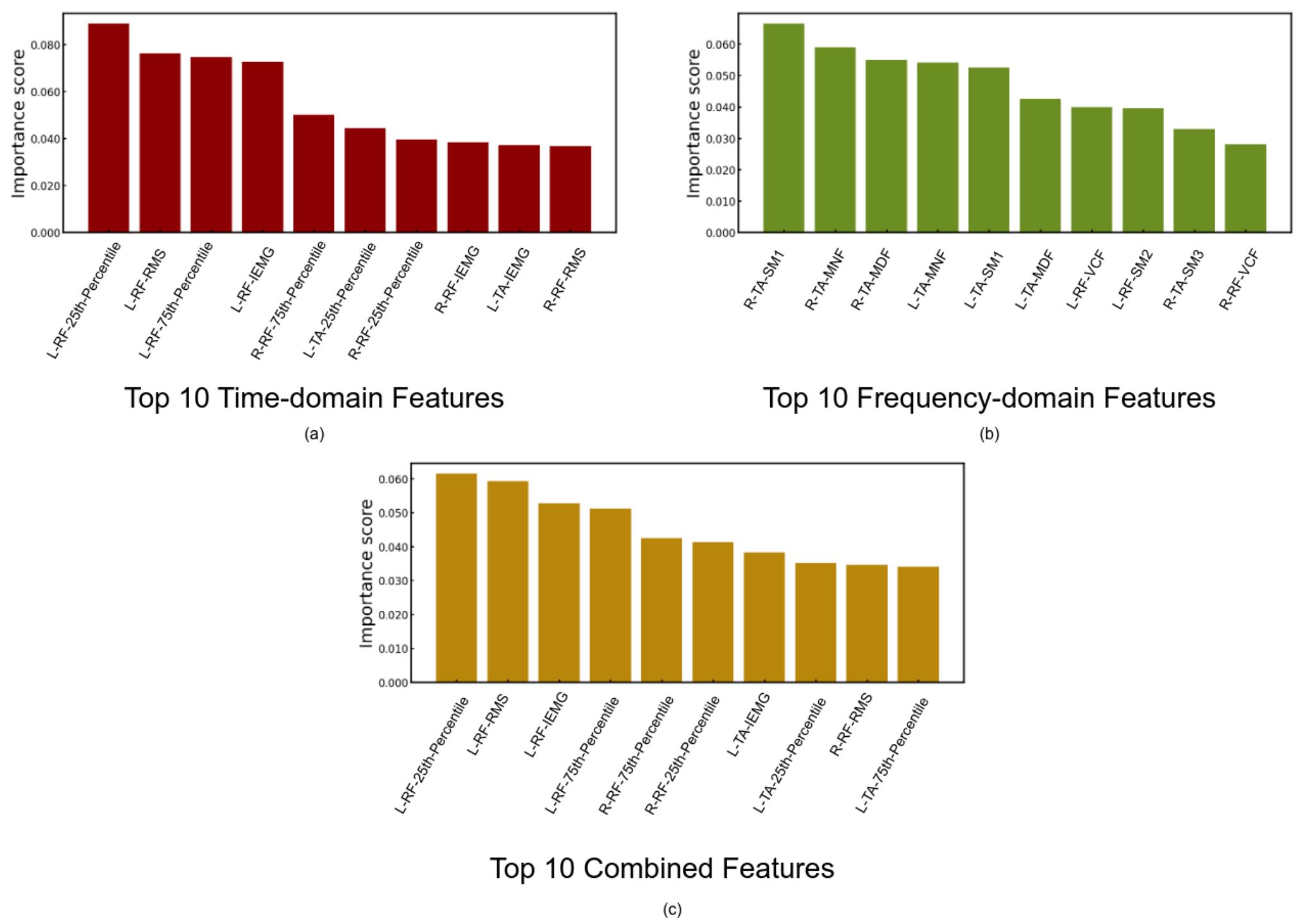
图 5. 采用时域和频域特征的 RDF 算法在不同腿部肌肉上的特征重要性得分:(a)时域特征,(b)频域特征,以及(c)组合特征。模式解读为(左或右)-(肌肉名称)-(特征)
在我们的研究中,我们对各种肌电图推荐的放置位置进行分类器测试方案,以确定这些转换的最有效位置。我们的结果如表四所示,表明股直肌(RF muscle)在这些任务中具有最高的影响,证实了临床观察,即股直肌质量的减少与执行坐到站转换的困难相关25。这些发现可能对于优化外骨骼的传感器放置至关重要,从而提高其在康复环境中的有效性。
D. 局限性
虽然这项研究提供了宝贵的见解,但一些局限性值得考虑。首先,样本量相对较小,只有一名参与者是左撇子,并且所有参与者都很健康,这可能会限制研究结果的普遍性。未来的研究应该纳入更大和更多样化的参与者群体,以确保分类模型在不同人群中的稳健性。其次,该研究侧重于一组特定的EMG通道,这可能无法完全捕捉下肢运动的复杂性。
在未来的应用中,研究更广泛的肌肉群并优化通道选择,可以提高基于肌电图系统的实用性和用户舒适度。
E. 未来方向
尽管本研究提供了有希望的分类结果,但仍有很大的提升空间。首先,存在多种先进的特征提取技术,例如小波去噪(WD)和集合经验模态分解(EEMD)11。未来的研究将侧重于应用这些技术从EMG信号中提取有意义的特征,以进一步提高分类性能。其次,我们将探索更先进的分类器技术,例如深度学习14,以从原始EMG信号中捕获广义特征,从而简化EMG预处理。最后,由于本研究仅证明了对基于EMG的下肢分类有益的肌肉子集的影响,我们将研究最佳的EMG通道配置,以便为未来的基于EMG的应用实现可接受的分类性能。
4结论
本文研究了基于肌电信号的下肢运动检测分类,重点关注站立到坐下(坐姿)和坐下到站立(站姿)的过渡运动。采用三种传统的机器学习算法,利用不同腿部肌肉的时域和频域特征,研究基于肌电信号的休息、坐姿和站姿动作的下肢分类。分类结果表明,RDF模型结合时域和频域特征,在准确率(∼88%)和F1分数(∼87%)方面表现出最佳的分类性能。此外,我们发现与RF和TA肌肉相关的特征在分类不同的下肢运动中起着重要作用。这项研究表明,在肌电电极放置和特征集方面利用最佳配置,具有促进基于外骨骼的康复应用的潜力。