均匀圆形阵抗干扰MATLAB仿真实录与特点解读
文章目录
前言
\;\;\;\;\; 均匀圆形阵(UCA)凭借其独特的环形对称布局,展现出显著的全向感知与抗干扰优势。该结构能够在水平方向实现360°无差异覆盖,方向图均匀稳定,不存在传统阵列中固有的主瓣与副瓣性能差异,从而在复杂干扰环境下具备更一致、更稳健的抗干扰能力,尤其适用于需全向均匀防护的高动态场景。本文将以7阵元带圆心的均匀圆形阵为例,通过仿真实录直观展示其在不同干扰个数以及不同干扰条件下的抗干扰表现,并结合结果对其主要特点进行解读。
提示:以下是本篇文章正文内容,尊重版权,引用请附上链接。
一、均匀圆形阵模型
\;\;\;\;\; 均匀圆形阵结构如下图所示, M M M-1个阵元均匀地分布在半径为 R R R的圆环上,剩余的一个阵元位于圆心处并作为参考阵元组成如下图所示的天线阵列,半径R设为半个波长。图中 M M M为7。
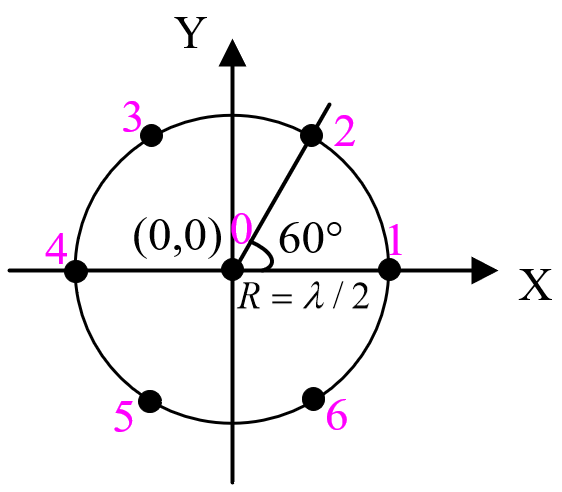
\;\;\;\;\; 圆周上六个阵元沿60°对称分布。抗干扰原理采用的为线性约束最小功率算法。
二、MATLAB仿真及分析
\;\;\;\;\; 仿真参数设置如下,信号使用BPSK信号。
bash
K=1024; % 快拍数
fines=240; % 期望信号指向方位角
thetas=60; % 期望信号指向俯仰角
signal_SNR=-30; % 期望信号信噪比
signal_B=3e6; % 期望信号带宽
INR=50; % 干噪比
fi_B=[6e6 9e6 12e6 18e6 24e6 30e6]; % 干扰信号带宽 \;\;\;\;\; 采用7阵元均匀圆形阵,有用信号来向(60°,240°),6个干扰信号来向分别为(10°,20°)、(30°,100°)、(40°,150°)、(50°,210°)、(60°,270°)、(70°,330°)。分别选取1个干扰信号、2个干扰信号、3个干扰、4个干扰、5个干扰、6个干扰信号作为干扰,仿真结果如下所示:
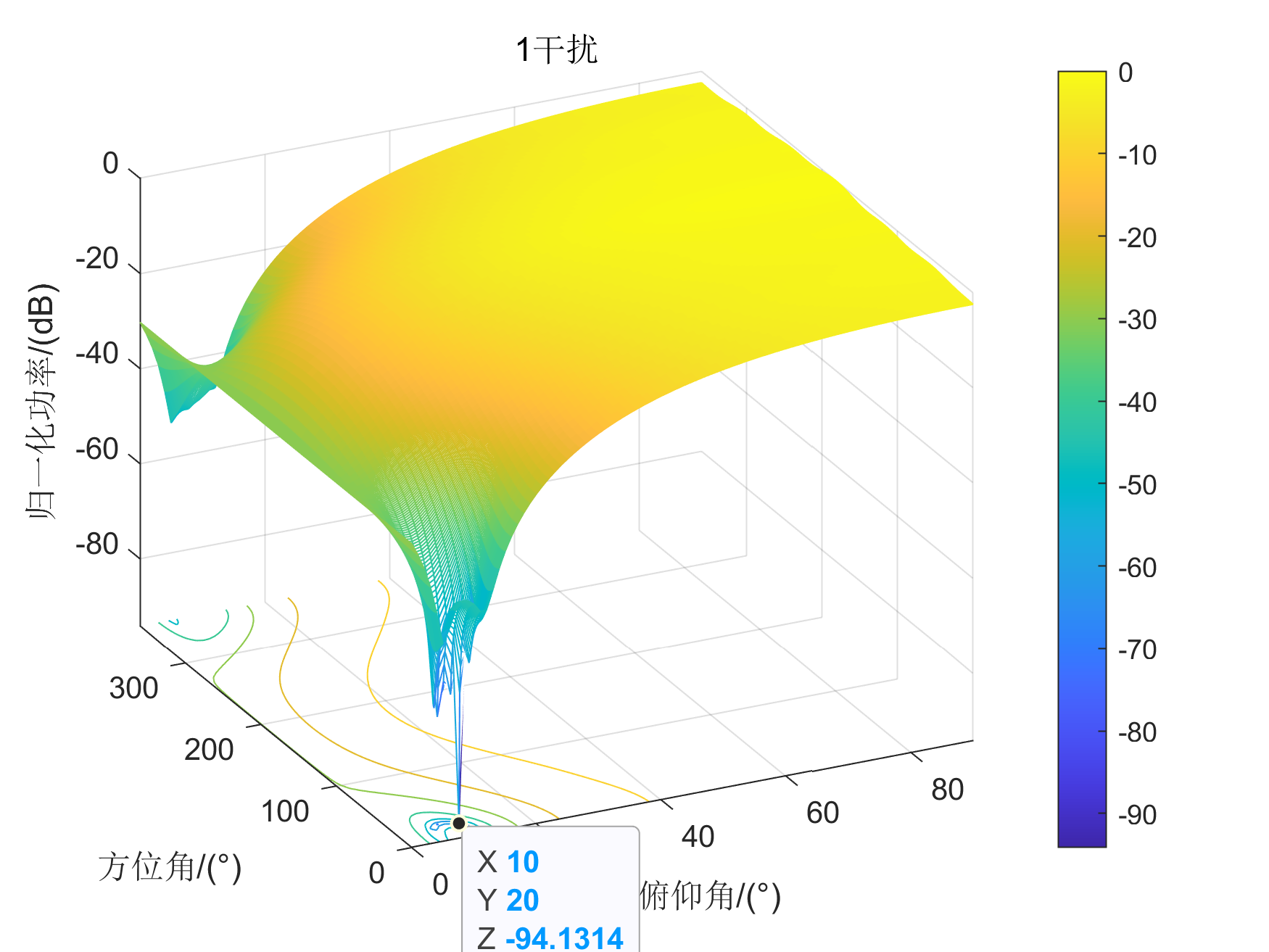
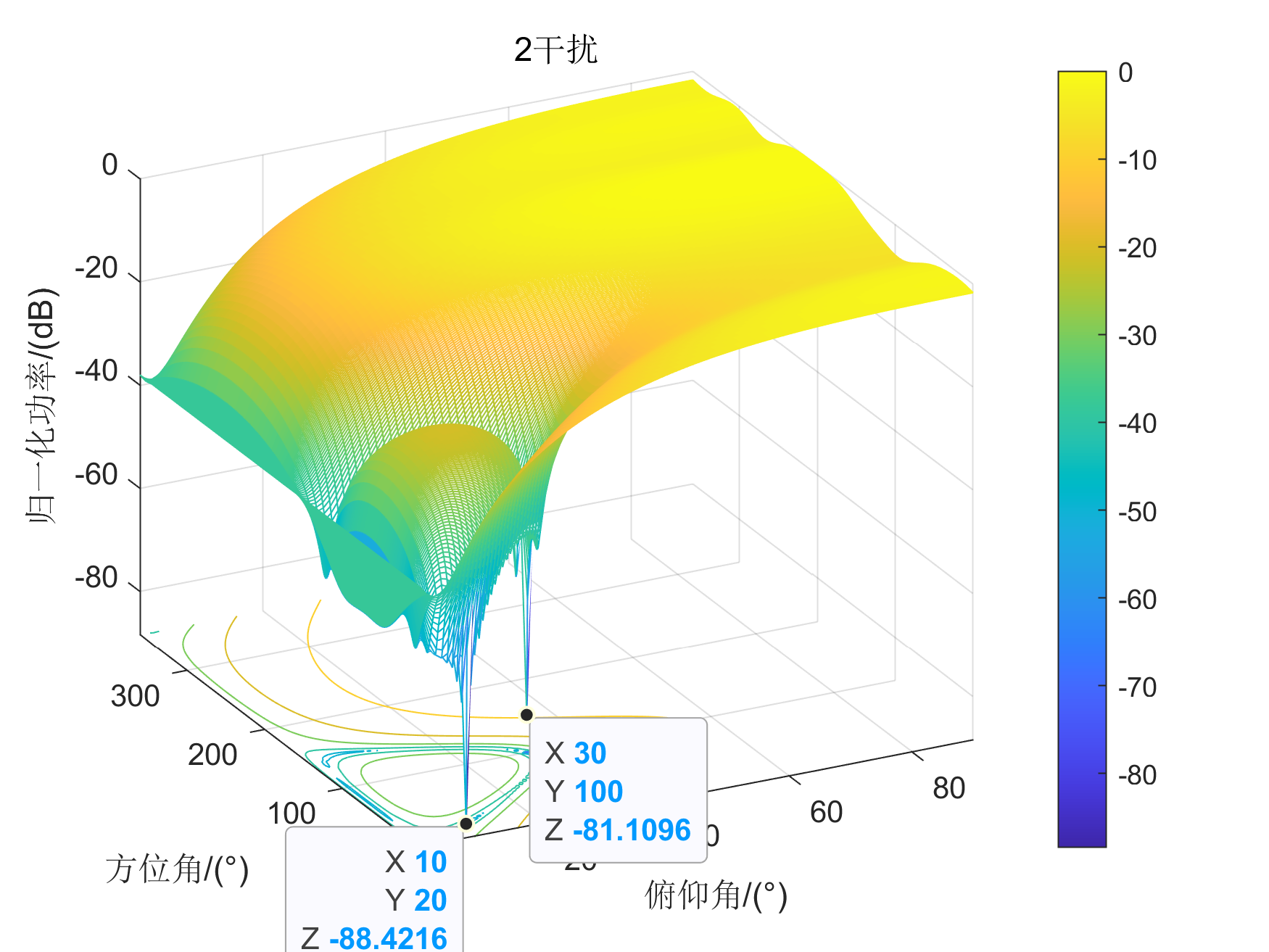
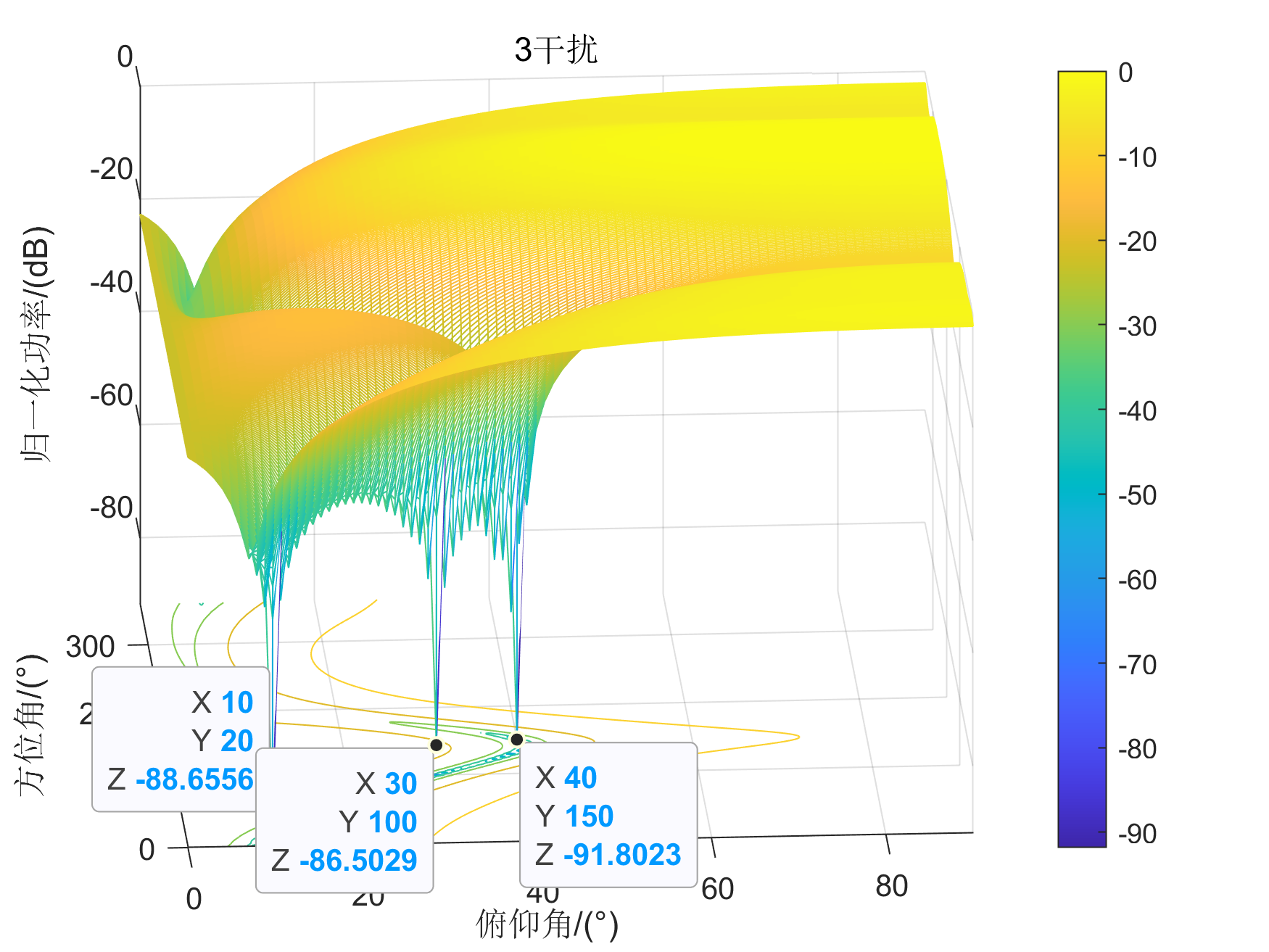
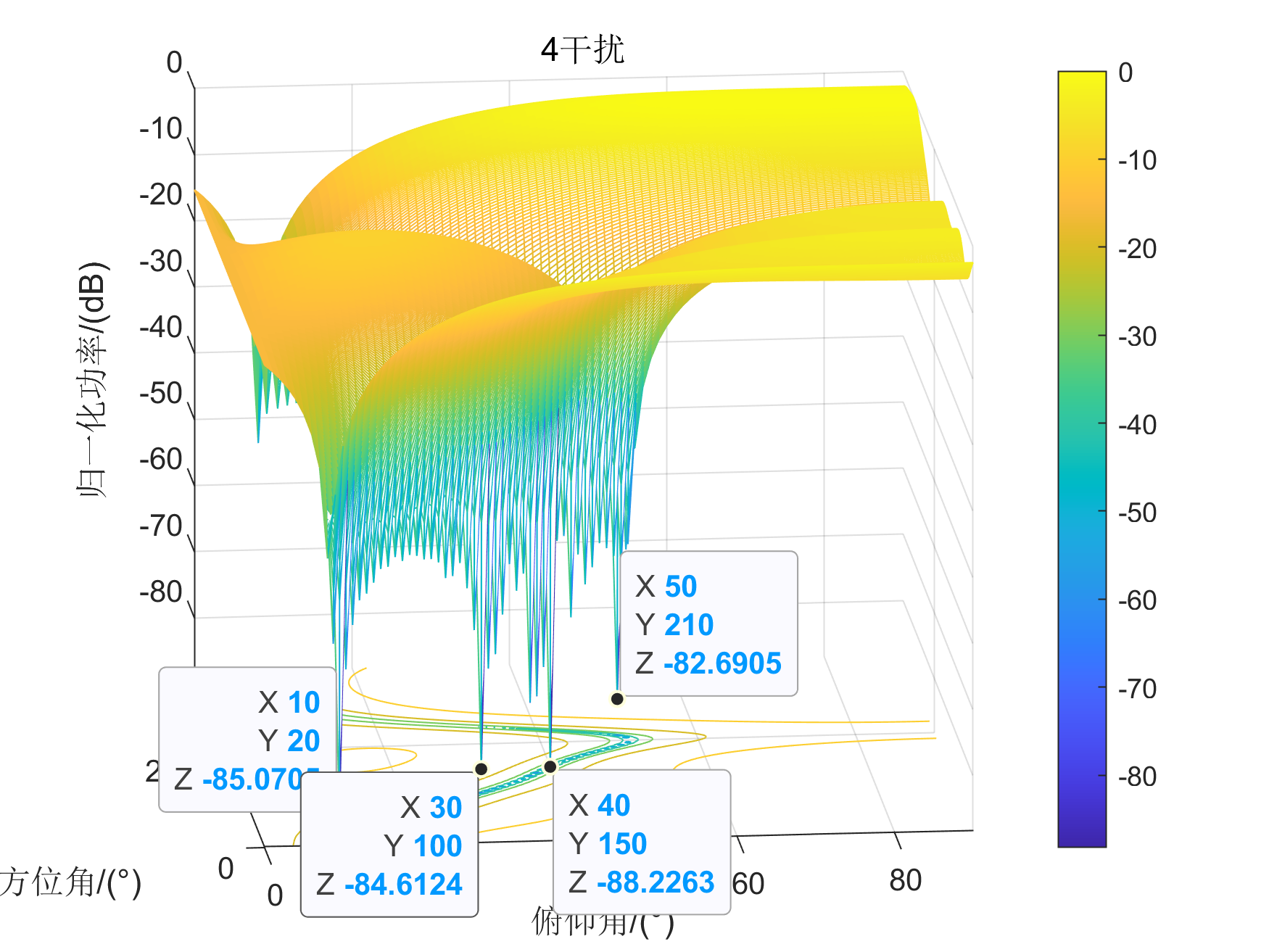
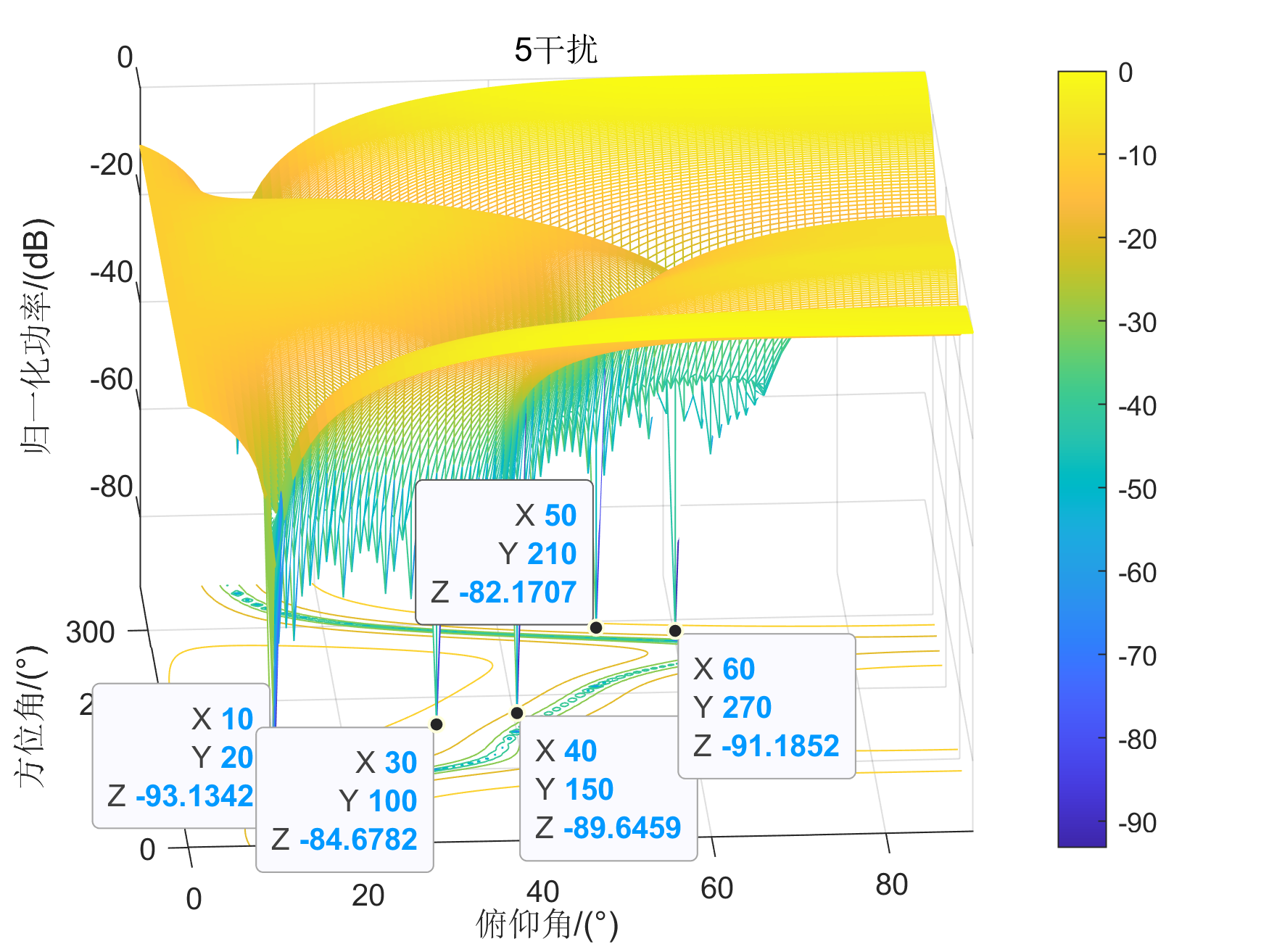
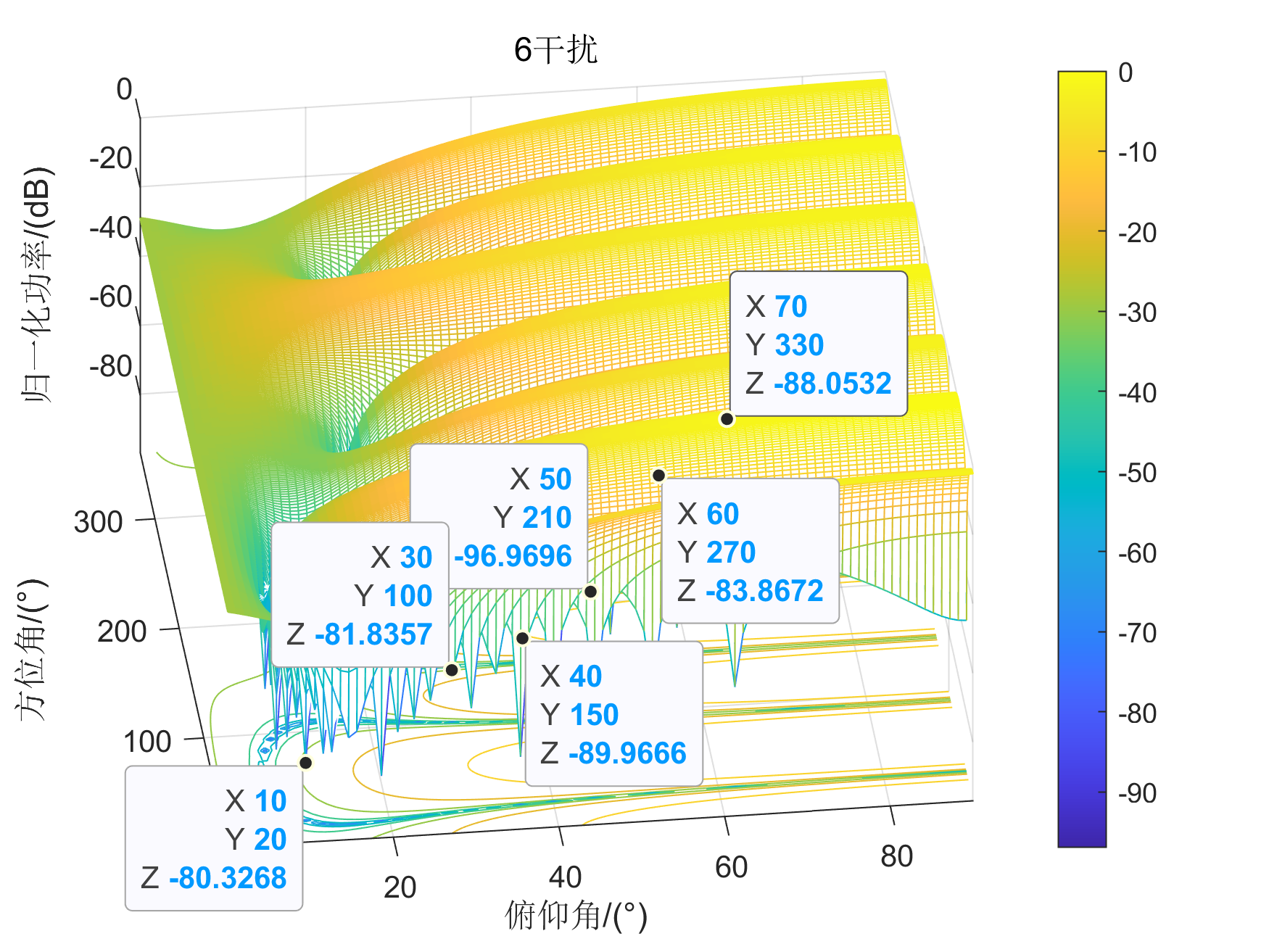
\;\;\;\;\; 由于7阵元的自由度为6,理论上最多可抑制6个干扰,从仿真结果来看是符合的,7阵元均匀圆阵在输入干扰信号数目6个以内时均准确地形成了很深的零陷,成功抑制了干扰。
\;\;\;\;\; 修改6个干扰信号角度为(40°,20°)、(40°,100°)、(40°,150°)、(40°,210°)、(40°,270°)、(40°,330°),仿真结果如下:
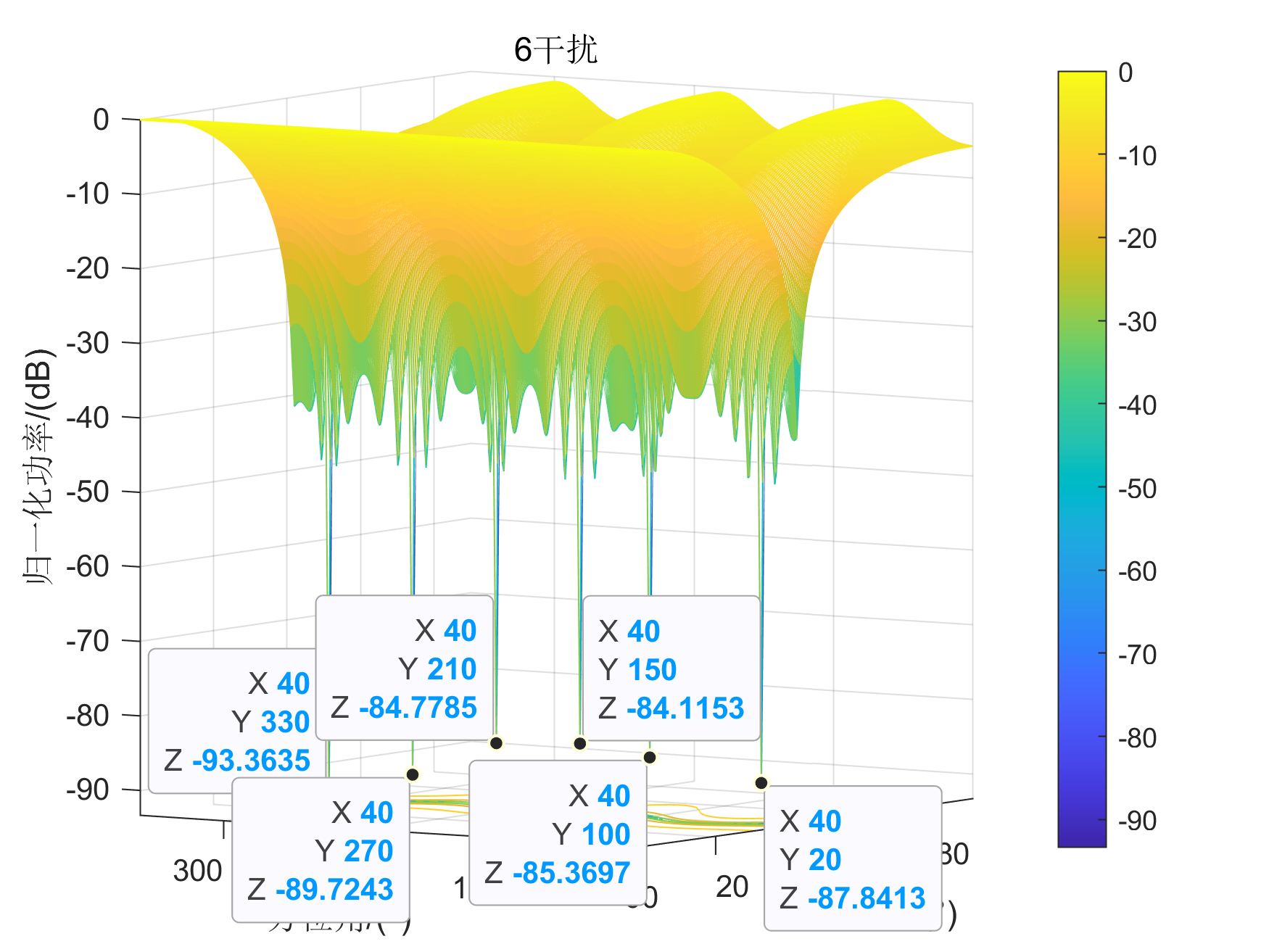
\;\;\;\;\; 可见同一俯仰角入射,不同方位角入射的6个干扰也能被较好的抑制。
\;\;\;\;\; 固定6个干扰的方位角分别为90°和60°,俯仰角为10°、30°、40°、50°、60°、70°,仿真结果如下:
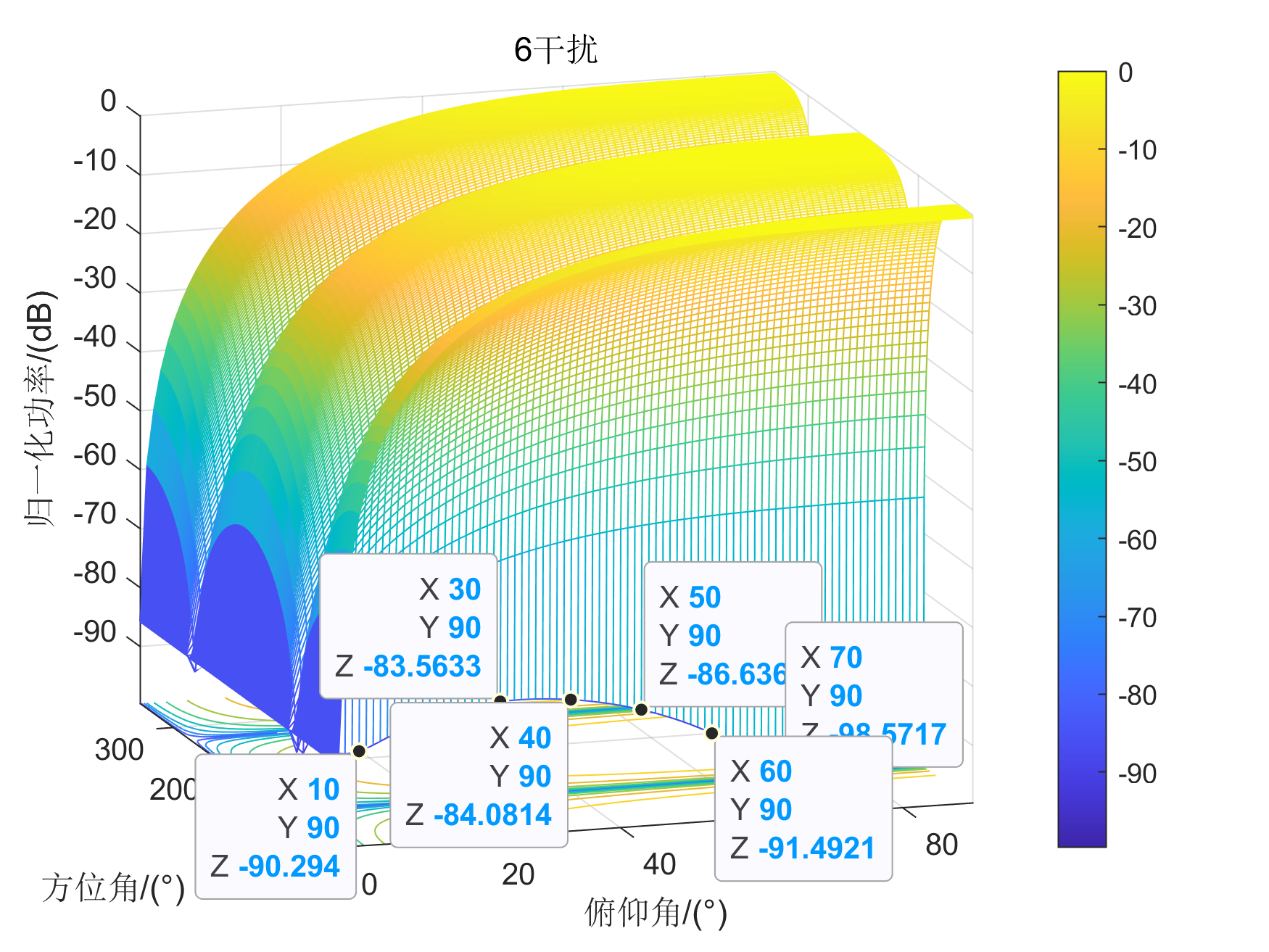
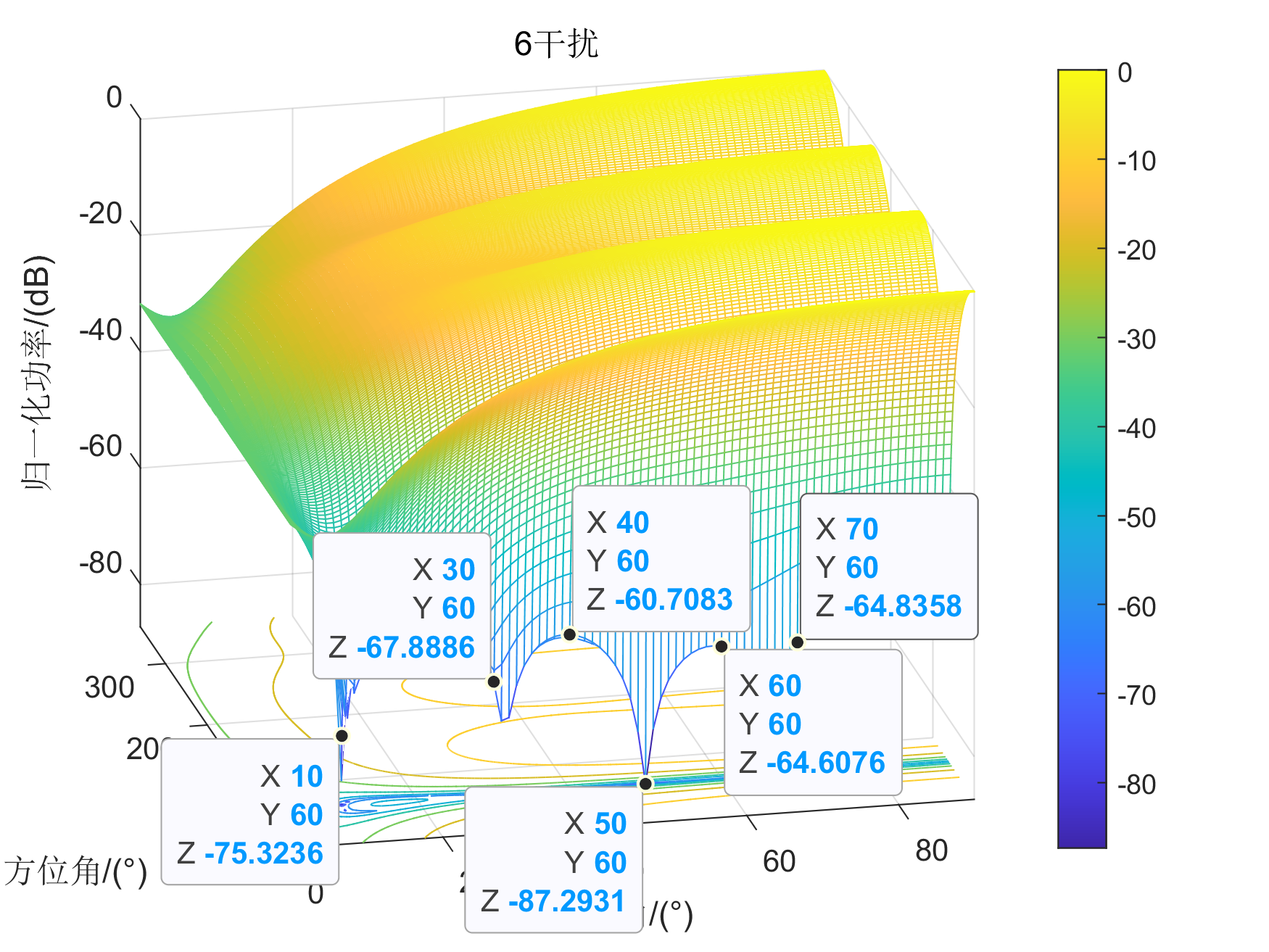
\;\;\;\;\; 对比会发现,方位角为90°的情况干扰抑制效果要好,这是方位角为60°时,各个信号入射角度的投影过了参考阵元0和阵元2和阵元5两个阵元。顺带说一点,改变方位角为0°时效果也要差些,原因是一样的。
三、MATLAB代码
总结
\;\;\;\;\; 综上所述:对于7阵元均匀圆形阵,其自由度为6,理论上最多可同时抑制6个独立干扰源。仿真结果验证了这一点:在输入干扰信号数目小于或等于6时,阵列方向图均能在干扰来波方向形成显著而深的零陷,从而实现对干扰信号的有效抑制。