本文是笔者在学习 正点原子官方 的《【正点原子】手把手教你学UCOS-III实时操作系统 》系列视频时整理的笔记。
视频讲解清晰透彻,非常感谢UP主的无私奉献!原课程链接如下:
👉 B站视频链接: 【正点原子】手把手教你学UCOS-III实时操作系统_哔哩哔哩_bilibili
目录
1、添加UCOSIII源码
①复制内存管理实验到我们新创建的统一存放UCOSIII的文件夹下:
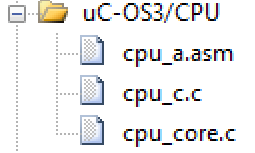
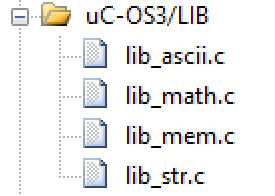
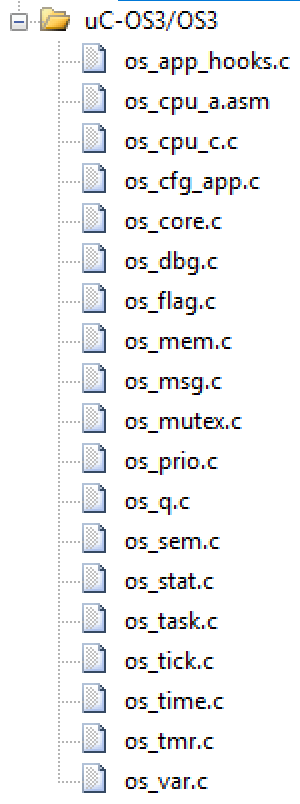
②去官网下载好这三个源代码
链接:https://github.com/weston-embedded/
③将"内存管理实验"的文件夹名修改为"UCOSIII移植",并在里面新建一个名为"uC-OS3"文件夹,
将刚下载好的三个源代码解压后全部放在"uC-OS3"文件夹内。
④打开实验工程,创建下面4个分组
⑤从"uC-OS3"文件中的CPU和OS3文件夹中分别添加这两个文件到这个BSP分组上。
后面这些类似步骤,将下面的文件添加到对应的分组即可。
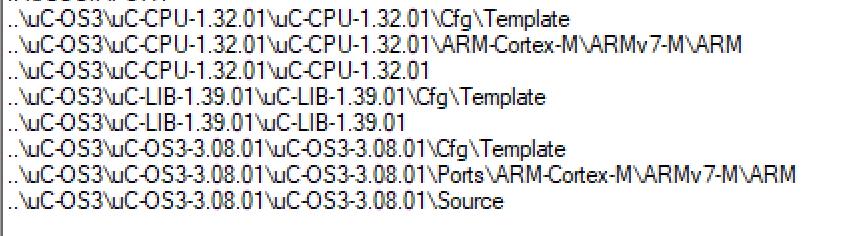
⑥添加路径
2、修改SYSTEM文件
①sys.h里将宏置1

②usart.c里将包含的头文件"include.h"修改成"os.h"

③delay.c
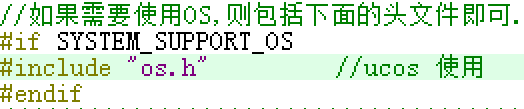
(1)修改头文件
(2)从定义的变量后面开始删到delay_ostimedly()函数为止(包括该函数)。
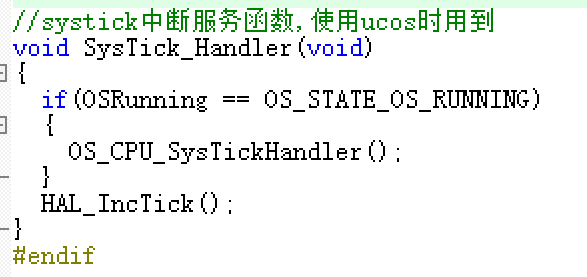
(3)修改systick中断服务函数
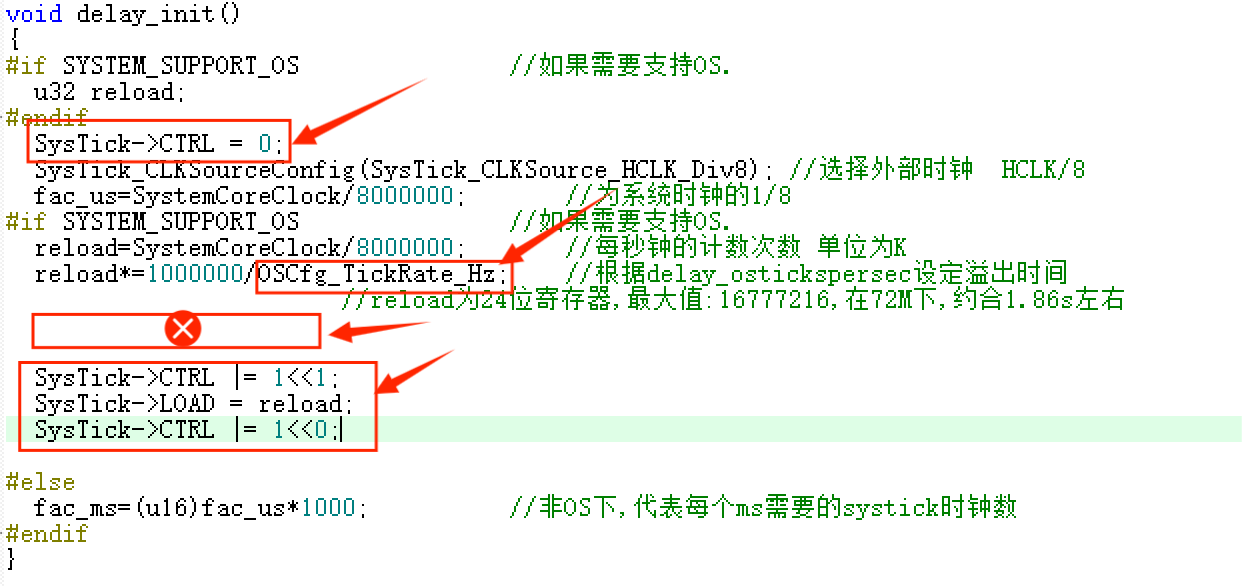
(4)修改延迟初始化的函数
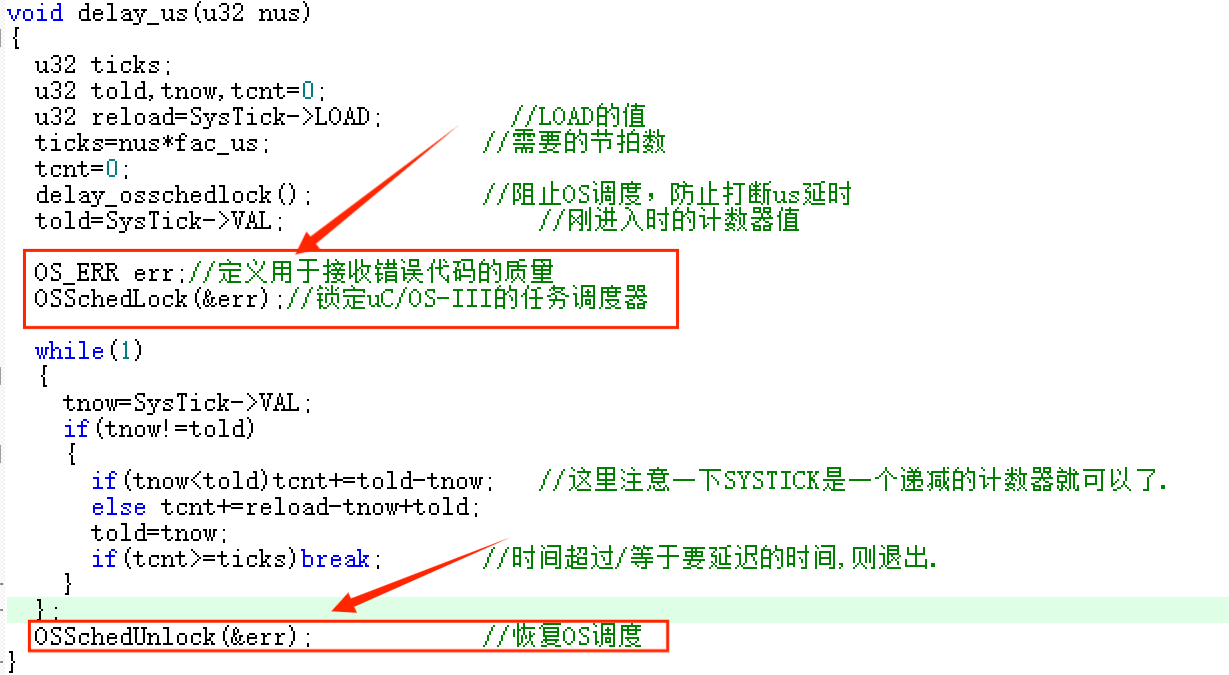
(5)修改微秒延迟的函数
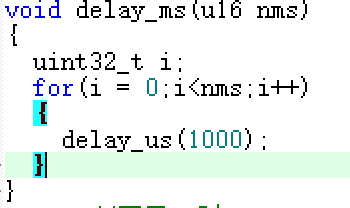
(6)修改毫秒延迟的函数
3、修改中断相关文件
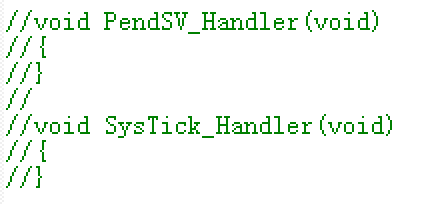
①stm32f10x_it.c和****stm32f10x_it.h
重复定义了注释掉

②startup_stmf10x_hd.s


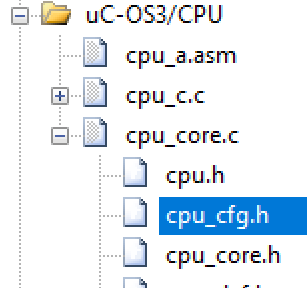
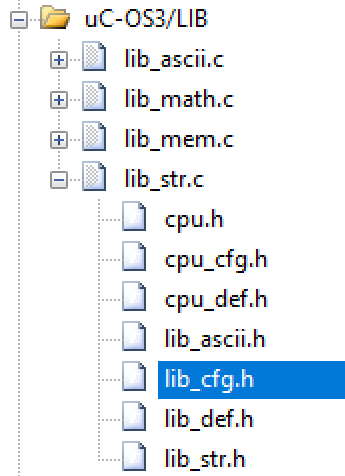
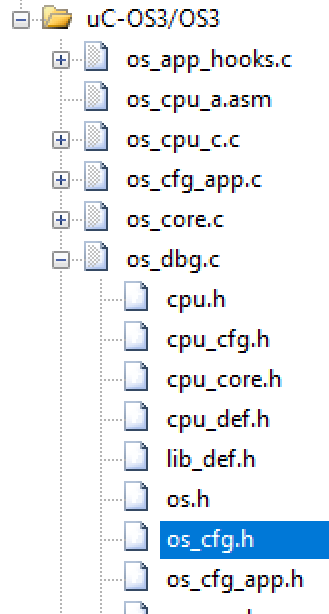
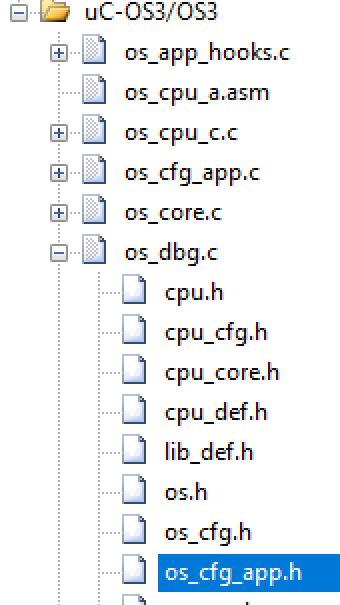
4、修改四个头文件
因为要修改的宏比较多,所以直接复制粘贴了移植成功后的实验的相关头文件。
要修改的头文件路径如图所示:
5、测试移植是否成功
编译之后发现有很多错误,集中错误显示在ucos_ii.h文件,显示变量未定义。
但是我们要用的是ucosIII的,不需要原来的关于UCOSII的文件,把这三个分组的删掉并且把相关路径删掉问题就解决了。
编译0错误0警告之后,将移植成功后的实验的demo文件加进去,下载编译后0错误0警告。

demo代码如下:
cs
/**
****************************************************************************************************
* @file uc-os3_demo.c
* @author 正点原子团队(ALIENTEK)
* @version V1.0
* @date 2022-04-13
* @brief uC/OS-III 移植实验
* @license Copyright (c) 2020-2032, 广州市星翼电子科技有限公司
****************************************************************************************************
* @attention
*
* 实验平台:正点原子 探索者 F407开发板
* 在线视频:www.yuanzige.com
* 技术论坛:www.openedv.com
* 公司网址:www.alientek.com
* 购买地址:openedv.taobao.com
*
****************************************************************************************************
*/
#include "uc-os3_demo.h"
#include "usart.h"
#include "led.h"
#include "delay.h"
/*uC/OS-III*********************************************************************************************/
#include "os.h"
#include "cpu.h"
/******************************************************************************************************/
/*uC/OS-III配置*/
//UCOSIII中以下优先级用户程序不能使用,ALIENTEK
//将这些优先级分配给了UCOSIII的5个系统内部任务
//优先级0:中断服务服务管理任务 OS_IntQTask()
//优先级1:时钟节拍任务 OS_TickTask()
//优先级2:定时任务 OS_TmrTask()
//优先级OS_CFG_PRIO_MAX-2:统计任务 OS_StatTask()
//优先级OS_CFG_PRIO_MAX-1:空闲任务 OS_IdleTask()
//技术支持:www.openedv.com
//淘宝店铺:http://eboard.taobao.com
//广州市星翼电子科技有限公司
//作者:正点原子 @ALIENTEK
//任务优先级
#define START_TASK_PRIO 3
//任务堆栈大小
#define START_STK_SIZE 512
//任务控制块
OS_TCB StartTaskTCB;
//任务堆栈
CPU_STK START_TASK_STK[START_STK_SIZE];
//任务函数
void start_task(void *p_arg);
//任务优先级
#define LED0_TASK_PRIO 4
//任务堆栈大小
#define LED0_STK_SIZE 128
//任务控制块
OS_TCB Led0TaskTCB;
//任务堆栈
CPU_STK LED0_TASK_STK[LED0_STK_SIZE];
void led0_task(void *p_arg);
//任务优先级
#define LED1_TASK_PRIO 5
//任务堆栈大小
#define LED1_STK_SIZE 128
//任务控制块
OS_TCB Led1TaskTCB;
//任务堆栈
CPU_STK LED1_TASK_STK[LED1_STK_SIZE];
//任务函数
void led1_task(void *p_arg);
//任务优先级
#define FLOAT_TASK_PRIO 6
//任务堆栈大小
#define FLOAT_STK_SIZE 128
//任务控制块
OS_TCB FloatTaskTCB;
//任务堆栈
__align(8) CPU_STK FLOAT_TASK_STK[FLOAT_STK_SIZE];
//任务函数
void float_task(void *p_arg);
/******************************************************************************************************/
/**
* @brief uC/OS-III例程入口函数
* @param 无
* @retval 无
*/
void uc_os3_demo(void)
{
OS_ERR err;
OSInit(&err); //初始化UCOSIII
//创建开始任务
OSTaskCreate((OS_TCB * )&StartTaskTCB, //任务控制块
(CPU_CHAR * )"start task", //任务名字
(OS_TASK_PTR )start_task, //任务函数
(void * )0, //传递给任务函数的参数
(OS_PRIO )START_TASK_PRIO, //任务优先级
(CPU_STK * )&START_TASK_STK[0], //任务堆栈基地址
(CPU_STK_SIZE)START_STK_SIZE/10, //任务堆栈深度限位
(CPU_STK_SIZE)START_STK_SIZE, //任务堆栈大小
(OS_MSG_QTY )0, //任务内部消息队列能够接收的最大消息数目,为0时禁止接收消息
(OS_TICK )0, //当使能时间片轮转时的时间片长度,为0时为默认长度,
(void * )0, //用户补充的存储区
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR, //任务选项
(OS_ERR * )&err); //存放该函数错误时的返回值
OSStart(&err); //开启UCOSIII
}
/**
* @brief start_task
* @param p_arg : 传入参数(未用到)
* @retval 无
*/
//开始任务函数
void start_task(void *p_arg)
{
OS_ERR err;
p_arg = p_arg;
CPU_Init();
#if OS_CFG_STAT_TASK_EN > 0u
OSStatTaskCPUUsageInit(&err); //统计任务
#endif
#ifdef CPU_CFG_INT_DIS_MEAS_EN //如果使能了测量中断关闭时间
CPU_IntDisMeasMaxCurReset();
#endif
#if OS_CFG_SCHED_ROUND_ROBIN_EN //当使用时间片轮转的时候
//使能时间片轮转调度功能,时间片长度为1个系统时钟节拍,既1*5=5ms
OSSchedRoundRobinCfg(DEF_ENABLED,1,&err);
#endif
OSSchedRoundRobinCfg(OS_TRUE, 0, &err);
//创建LED0任务
OSTaskCreate((OS_TCB * )&Led0TaskTCB,
(CPU_CHAR * )"led0 task",
(OS_TASK_PTR )led0_task,
(void * )0,
(OS_PRIO )LED0_TASK_PRIO,
(CPU_STK * )&LED0_TASK_STK[0],
(CPU_STK_SIZE)LED0_STK_SIZE/10,
(CPU_STK_SIZE)LED0_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
//创建LED1任务
OSTaskCreate((OS_TCB * )&Led1TaskTCB,
(CPU_CHAR * )"led1 task",
(OS_TASK_PTR )led1_task,
(void * )0,
(OS_PRIO )LED1_TASK_PRIO,
(CPU_STK * )&LED1_TASK_STK[0],
(CPU_STK_SIZE)LED1_STK_SIZE/10,
(CPU_STK_SIZE)LED1_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
//创建浮点测试任务
OSTaskCreate((OS_TCB * )&FloatTaskTCB,
(CPU_CHAR * )"float test task",
(OS_TASK_PTR )float_task,
(void * )0,
(OS_PRIO )FLOAT_TASK_PRIO,
(CPU_STK * )&FLOAT_TASK_STK[0],
(CPU_STK_SIZE)FLOAT_STK_SIZE/10,
(CPU_STK_SIZE)FLOAT_STK_SIZE,
(OS_MSG_QTY )0,
(OS_TICK )0,
(void * )0,
(OS_OPT )OS_OPT_TASK_STK_CHK|OS_OPT_TASK_STK_CLR,
(OS_ERR * )&err);
OSTaskDel((OS_TCB *)0, &err);
}
//led0任务函数
void led0_task(void *p_arg)
{
OS_ERR err;
p_arg = p_arg;
while(1)
{
LED0=0;
OSTimeDlyHMSM(0,0,0,500,OS_OPT_TIME_HMSM_STRICT,&err); //延时500ms
LED0=1;
OSTimeDlyHMSM(0,0,0,500,OS_OPT_TIME_HMSM_STRICT,&err); //延时500ms
}
}
//led1任务函数
void led1_task(void *p_arg)
{
OS_ERR err;
p_arg = p_arg;
while(1)
{
LED1=~LED1;
OSTimeDlyHMSM(0,0,0,500,OS_OPT_TIME_HMSM_STRICT,&err); //延时500ms
}
}
//浮点测试任务
void float_task(void *p_arg)
{
static float float_num=0.01;
while(1)
{
float_num+=0.01f;
printf("float_num的值为: %.4f\r\n",float_num);
delay_ms(500); //延时500ms
}
}最后下载观察现象,移植成功了!!!!