

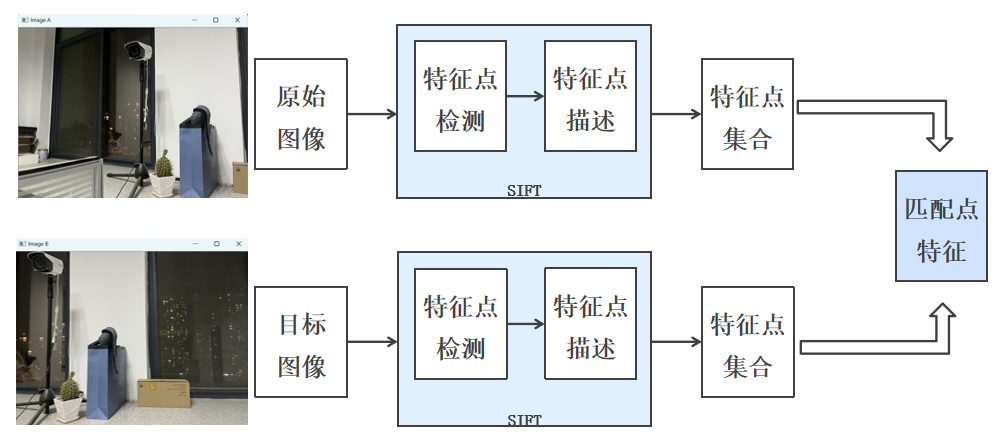
现在有这样的两张图片,我们怎样可以进行图片拼接,然后得到一张新图片

下面我先讲下大致操作
关键点A与找到的两个关键点 X、Y的欧氏距离分别 d1、d2,且d1<d2。 欧氏距离(关键点A,关键点X)=d1。 欧氏距离(关键点A,关键点Y)=d2。 (1)d1<d2,比值较大:可能不是匹配点,通常是由噪声引起的。 (2)d1<d2,比值较小:是匹配点。
还是根据上面一篇的sift特征检测来实现的,具体看代码
代码部分
import cv2
import numpy as np
import sys
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)
def detectAndDecribe(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
sift=cv2.SIFT_create()
kps, des = sift.detectAndCompute(gray, None)
kps_float=np.float32([kp.pt for kp in kps])
return (kps, kps_float, des)
imageA=cv2.imread('img1.jpg')
imageB=cv2.imread('img2.jpg')
cv_show('imageA',imageA)
cv_show('imageB',imageB)
(kpsA, kps_floatA, desA) = detectAndDecribe(imageA)
(kpsB, kps_floatB, desB) = detectAndDecribe(imageB)
matcher = cv2.BFMatcher()
rawMatches = matcher.knnMatch(desB, desA, k=2)
good=[]
matches=[]
for m in rawMatches:
if len(m)==2 and m[0].distance < 0.65*m[1].distance:
good.append(m)
matches.append((m[0].queryIdx,m[0].trainIdx))
print(len(good))
print(matches)
vis=cv2.drawMatchesKnn(imageB, kpsB, imageA, kpsA, good, None, flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv_show('vis',vis)
if len(matches)>4:
ptsB=np.float32([kps_floatB[i] for (i,_) in matches])
ptsA=np.float32([kps_floatA[i] for (_,i) in matches])
(H,mask)=cv2.findHomography(ptsB,ptsA,cv2.RANSAC,10)
else:
print('no matches')
sys.exit()
result= cv2.warpPerspective(imageB, H,(imageB.shape[1]+imageA.shape[1],imageB.shape[0]))
cv_show('result1',result)
result[0:imageB.shape[0],0:imageB.shape[1]]=imageA
cv_show('result2',result)
cv2.imwrite('result.jpg',result)代码详解3. 代码分步解析
1 图像显示辅助函数
def cv_show(name,img):
cv2.imshow(name, img)
cv2.waitKey(0)- 功能:封装了OpenCV的图像显示逻辑
- 参数:窗口名称和图像矩阵
- 说明 :
waitKey(0)表示等待用户按键后关闭窗口
2 特征检测与描述函数
def detectAndDecribe(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT_create()
kps, des = sift.detectAndCompute(gray, None)
kps_float = np.float32([kp.pt for kp in kps])
return (kps, kps_float, des)- 灰度转换:将图像转为灰度图,减少计算量
- SIFT特征检测:创建SIFT检测器,检测关键点并计算描述符
- 关键点坐标提取:将关键点位置转换为NumPy数组格式便于后续处理
- 返回值:关键点对象、关键点坐标和特征描述符
3 图像加载与特征提取
imageA = cv2.imread('img1.jpg')
imageB = cv2.imread('img2.jpg')
(kpsA, kps_floatA, desA) = detectAndDecribe(imageA)
(kpsB, kps_floatB, desB) = detectAndDecribe(imageB)- 加载两张输入图像
- 分别提取它们的SIFT特征
4 特征匹配与筛选
matcher = cv2.BFMatcher()
rawMatches = matcher.knnMatch(desB, desA, k=2)
good = []
matches = []
for m in rawMatches:
if len(m)==2 and m[0].distance < 0.65*m[1].distance:
good.append(m)
matches.append((m[0].queryIdx, m[0].trainIdx))- BFMatcher:使用暴力匹配器进行特征匹配
- knnMatch:获取每个描述符的k个最佳匹配(此处k=2)
- Lowe's Ratio Test:使用比例测试筛选优质匹配,保留距离比值小于0.65的匹配
- 匹配结果 :
good保存DMatch对象,matches保存匹配索引对
5 匹配可视化
vis = cv2.drawMatchesKnn(imageB, kpsB, imageA, kpsA, good, None,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
cv_show('vis', vis)- 可视化匹配结果,显示两图像间的特征对应关系
DRAW_RICH_KEYPOINTS标志会绘制带有关键点大小和方向的可视化结果
6 单应性矩阵计算
if len(matches) > 4:
ptsB = np.float32([kps_floatB[i] for (i,_) in matches])
ptsA = np.float32([kps_floatA[i] for (_,i) in matches])
(H, mask) = cv2.findHomography(ptsB, ptsA, cv2.RANSAC, 10)
else:
print('no matches')
sys.exit()- 条件检查:至少需要4对匹配点才能计算单应性矩阵
- 点集提取:从匹配结果中提取对应的点坐标
- findHomography:使用RANSAC算法计算单应性矩阵,鲁棒地估计图像间的变换关系
- RANSAC参数 :
10表示RANSAC重投影阈值
7 图像变换与拼接
result = cv2.warpPerspective(imageB, H, (imageB.shape[1] + imageA.shape[1], imageB.shape[0]))
cv_show('result1', result)
result[0:imageB.shape[0], 0:imageB.shape[1]] = imageA
cv_show('result2', result)
cv2.imwrite('result.jpg', result)- warpPerspective:对图像B应用透视变换,将其对齐到图像A的坐标系
- 图像融合:将图像A直接复制到变换后的图像B的左侧区域
- 结果保存:将拼接结果保存为JPEG文件