目录
- [一、STM32G4 电流环闭环(二) 霍尔有感运行](#一、STM32G4 电流环闭环(二) 霍尔有感运行)
-
- [2. 霍尔有感运行](#2. 霍尔有感运行)
- 附学习参考网址
一、STM32G4 电流环闭环(二) 霍尔有感运行
2. 霍尔有感运行
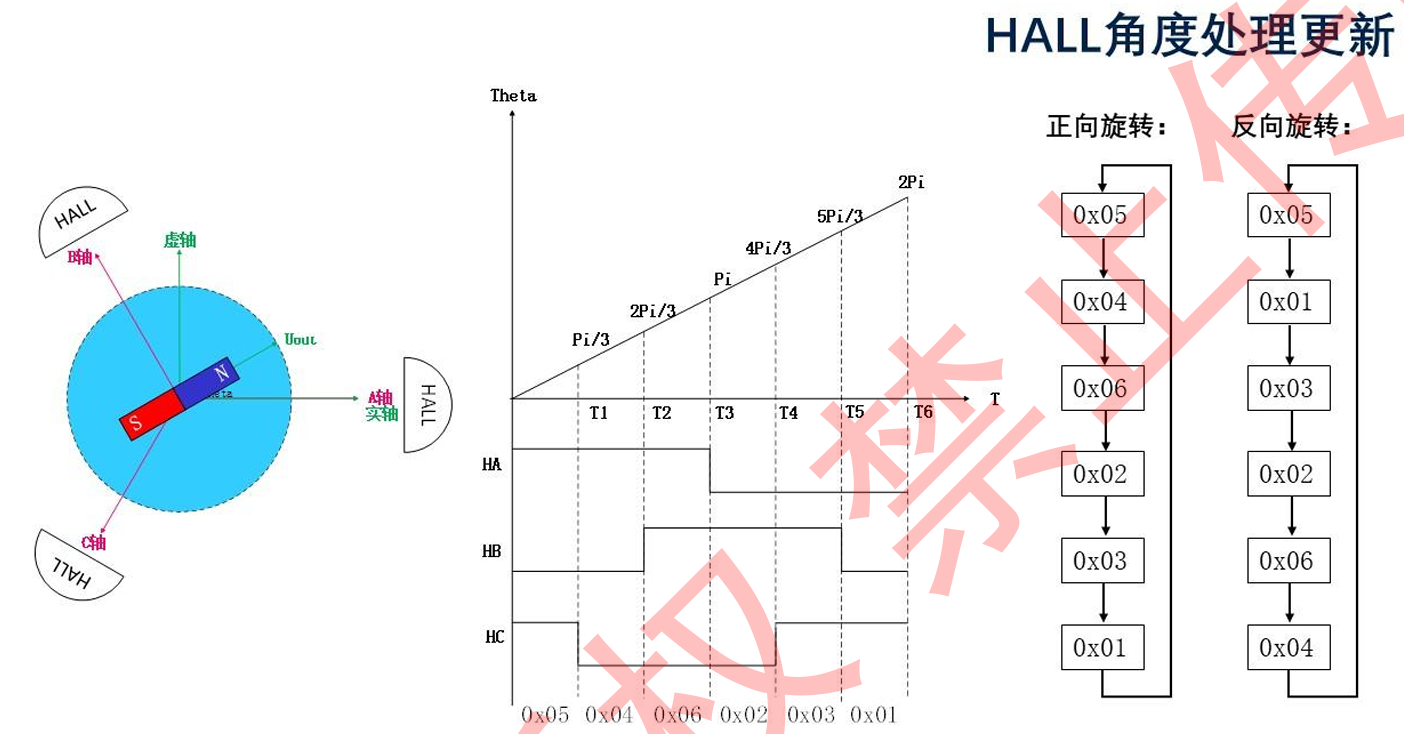
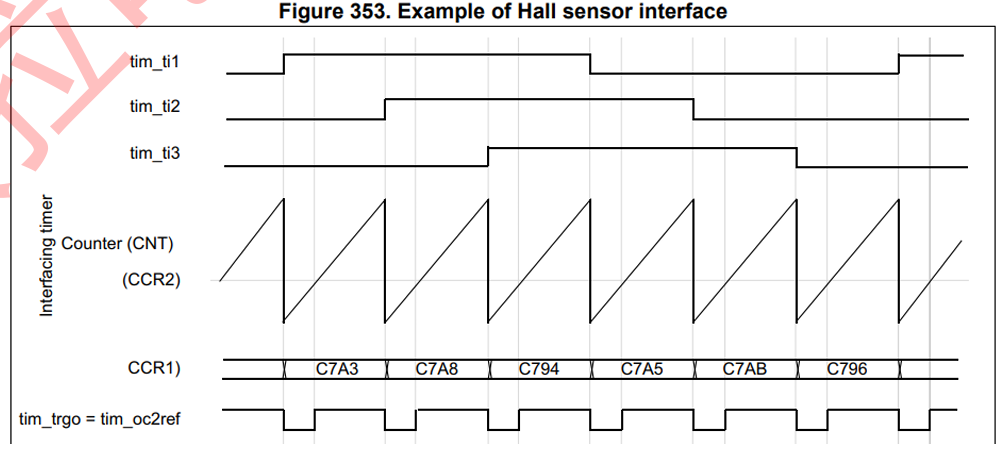
- 文章使用的BLDC在定子侧以互差120°电角度的位置安装三个霍尔元件Ha,Hb,Hc。当转子转动的时候霍尔元件会产生三个相位差120°电角度的高低电平信号。霍尔信号会将一个电周期划分为6个扇区,每个扇区60°电角度,通过单片机的定时器捕获可以获得每个扇区的运行时间t。为了获取准确的转子角度,点击绕组A相接电源正极,BC两相接电源负极,电子磁场与转子磁场共同作用,最终定位到转子零位点,也就是A相绕组的轴线位置。确定零点位置后,根据霍尔的信号顺序,可以得到霍尔信号与转子位置的对应关系,如下表所示:
-
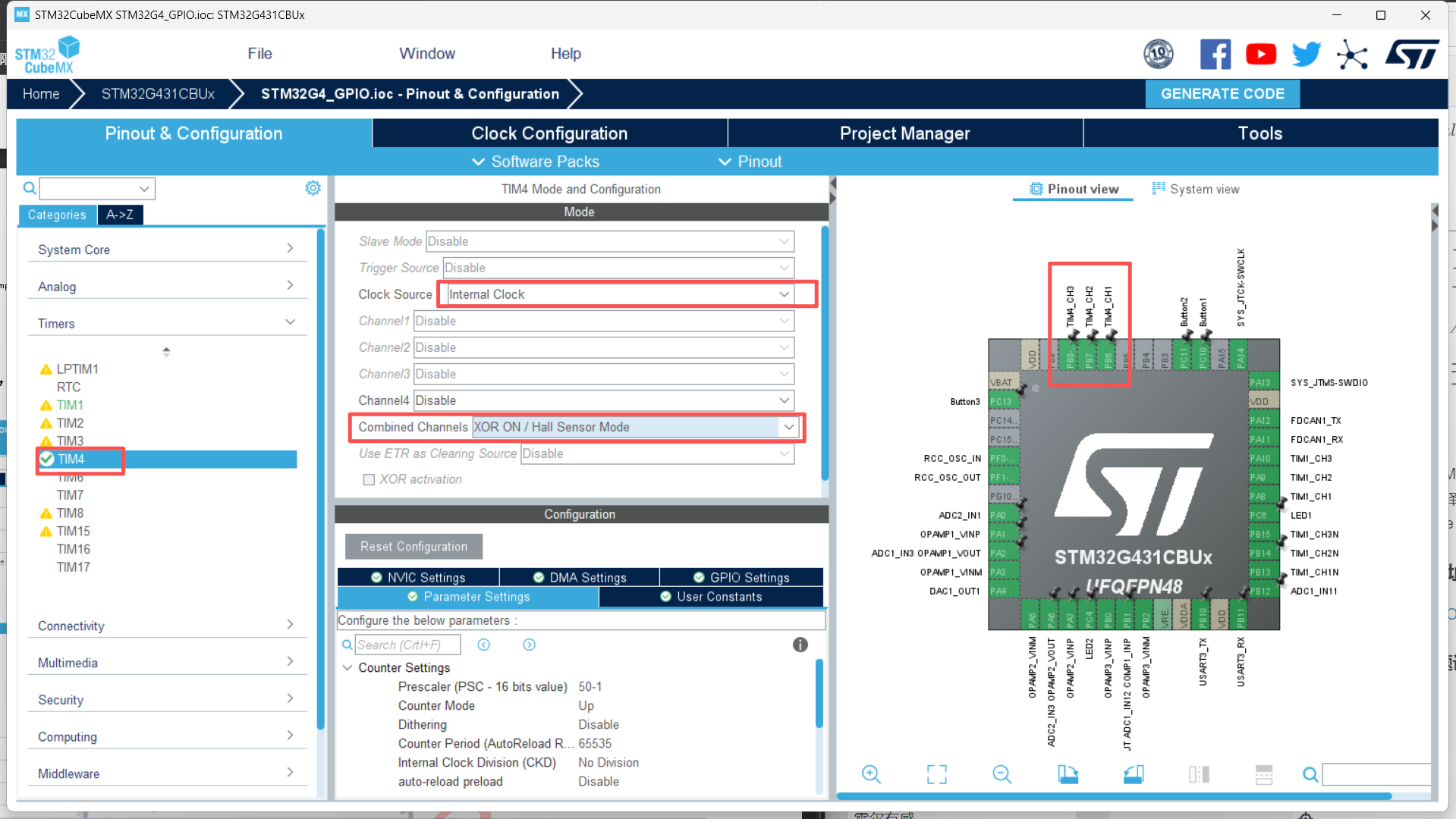
首先配置STM32G4的Hall接口;打开STM32CUBEMX;使能TIM4,选择内部时钟,在组合通道中选择XOR ON/ HALL Sensor mode;
-
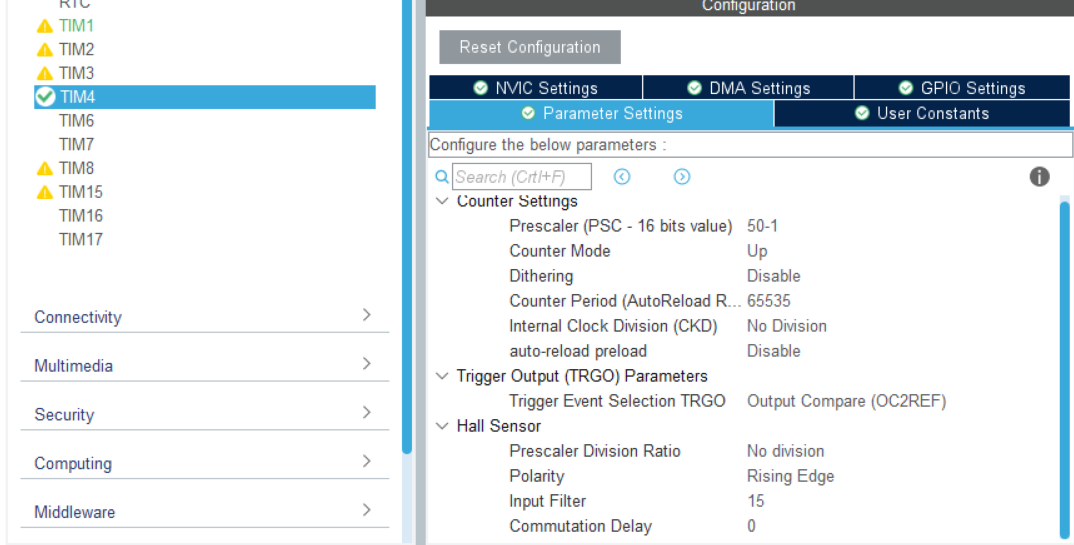
配置定时器参数;16分频后,TIM4的时钟为10M;
-
生成代码并打开Keil工程
-
在TIM输入捕获回调函数中添加如下代码,积分时间是10k;
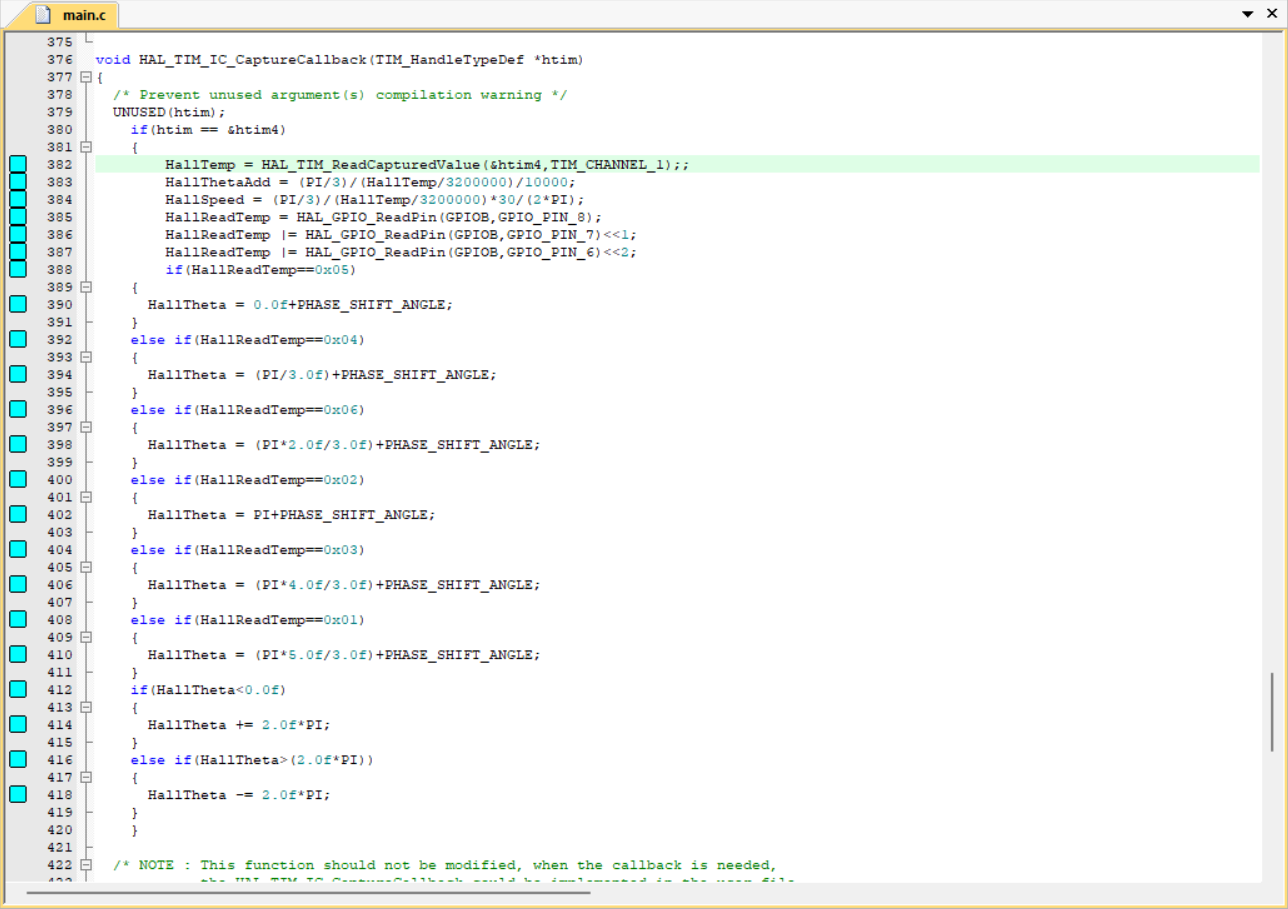
-
其中HALL角速度计算公式:
H a l l S p e e d = P I 3 ∗ H a l l T e m p HallSpeed = \frac{PI}{3 * HallTemp} HallSpeed=3∗HallTempPI
H a l l T h e t a = ∫ 0 H a l l T e m p H a l l S p e e d HallTheta = \int^{HallTemp}_{0}HallSpeed HallTheta=∫0HallTempHallSpeed -
在ADC注入组中断回调函数中输入,HALL传感器得到的速度和角度;在顶部添加的变量和ADC的代码修改如下
c
/* USER CODE BEGIN PV */
#define PI 3.14159265358979f
#define PHASE_SHIFT_ANGLE (float)(220.0f/360.0f*2.0f*PI)
extern DMA_HandleTypeDef hdma_usart3_tx;
uint8_t DataB1[32] = "LED1 Toggle\r\n";
uint8_t DataB2[32] = "LED2 Toggle\r\n";
uint8_t DataB3[32] = "LED1 and LED2 Open\r\n";
#define RXBUFFERSIZE 256
char RxBuffer[RXBUFFERSIZE];
uint8_t aRxBuffer;
uint8_t Uart1_Rx_Cnt = 0;
float load_data[5];
static uint8_t tempData[24] = {0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0x80,0x7F};
uint16_t DAC_temp = 0;
float Vbus,Ia,Ib,Ic;
uint8_t Motor_state = 0;
uint16_t IA_Offset,IB_Offset,IC_Offset;
uint16_t adc1_in1, adc1_in2, adc1_in3, Vpoten, adc_vbus;
uint8_t ADC_offset = 0;
FDCAN_RxHeaderTypeDef RxHeader;
FDCAN_TxHeaderTypeDef TxHeader;
uint8_t RxData[8]={NULL};
uint8_t TxData[8] = {NULL};
float HallTemp = 0;
float HallThetaAdd = 0;
float HallTheta = 0;
float HallSpeed = 0;
float HallSpeedLast = 0;
float HallSpeedtest = 0;
float alpha = 0.3;
uint8_t HallReadTemp = 0;
/* USER CODE END PV */
void HAL_ADCEx_InjectedConvCpltCallback(ADC_HandleTypeDef *hadc)
{
static uint8_t cnt;
/* Prevent unused argument(s) compilation warning */
UNUSED(hadc);
if(hadc == &hadc1)
{
if(ADC_offset == 0)
{
cnt++;
adc1_in1 = hadc1.Instance->JDR1;
adc1_in2 = hadc2.Instance->JDR1;
adc1_in3 = hadc1.Instance->JDR2;
IA_Offset += adc1_in1;
IB_Offset += adc1_in2;
IC_Offset += adc1_in3;
if(cnt >= 10)
{
ADC_offset = 1;
IA_Offset = IA_Offset/10;
IB_Offset = IB_Offset/10;
IC_Offset = IC_Offset/10;
}
}
else
{
HallTheta = HallTheta + HallThetaAdd;
if(HallTheta<0.0f)
{
HallTheta += 2.0f*PI;
}
else if(HallTheta>(2.0f*PI))
{
HallTheta -= 2.0f*PI;
}
rtU.theta = HallTheta;
rtU.SpeedFd = HallSpeed;
adc1_in1 = hadc1.Instance->JDR1;
adc1_in3 = hadc1.Instance->JDR2;
adc1_in2 = hadc2.Instance->JDR1;
Ia = (adc1_in1 - IA_Offset)*0.02197265625f;
Ib = (adc1_in2 - IB_Offset)*0.02197265625f;
Ic = (adc1_in3 - IC_Offset)*0.02197265625f;
rtU.ia = Ia;
rtU.ib = Ib;
rtU.ic = Ic;
FOC_Model_step();
TIM1->CCR1 = rtY.tABC[0];
TIM1->CCR2 = rtY.tABC[1];
TIM1->CCR3 = rtY.tABC[2];
load_data[0] = Ia;
load_data[1] = HallTemp;
load_data[2] = HallTheta;
load_data[3] = rtU.SpeedRef;
load_data[4] = HallSpeed;
memcpy(tempData, (uint8_t *)&load_data, sizeof(load_data));
HAL_UART_Transmit_DMA(&huart3,(uint8_t *)tempData,6*4);
}
}
/* NOTE : This function should not be modified. When the callback is needed,
function HAL_ADCEx_InjectedConvCpltCallback must be implemented in the user file.
*/
}- 编译代码,连接设备
- 打开Keil的debug模式,可以试试修改速度,同时启动vofa上位机观察电流和Hall数据
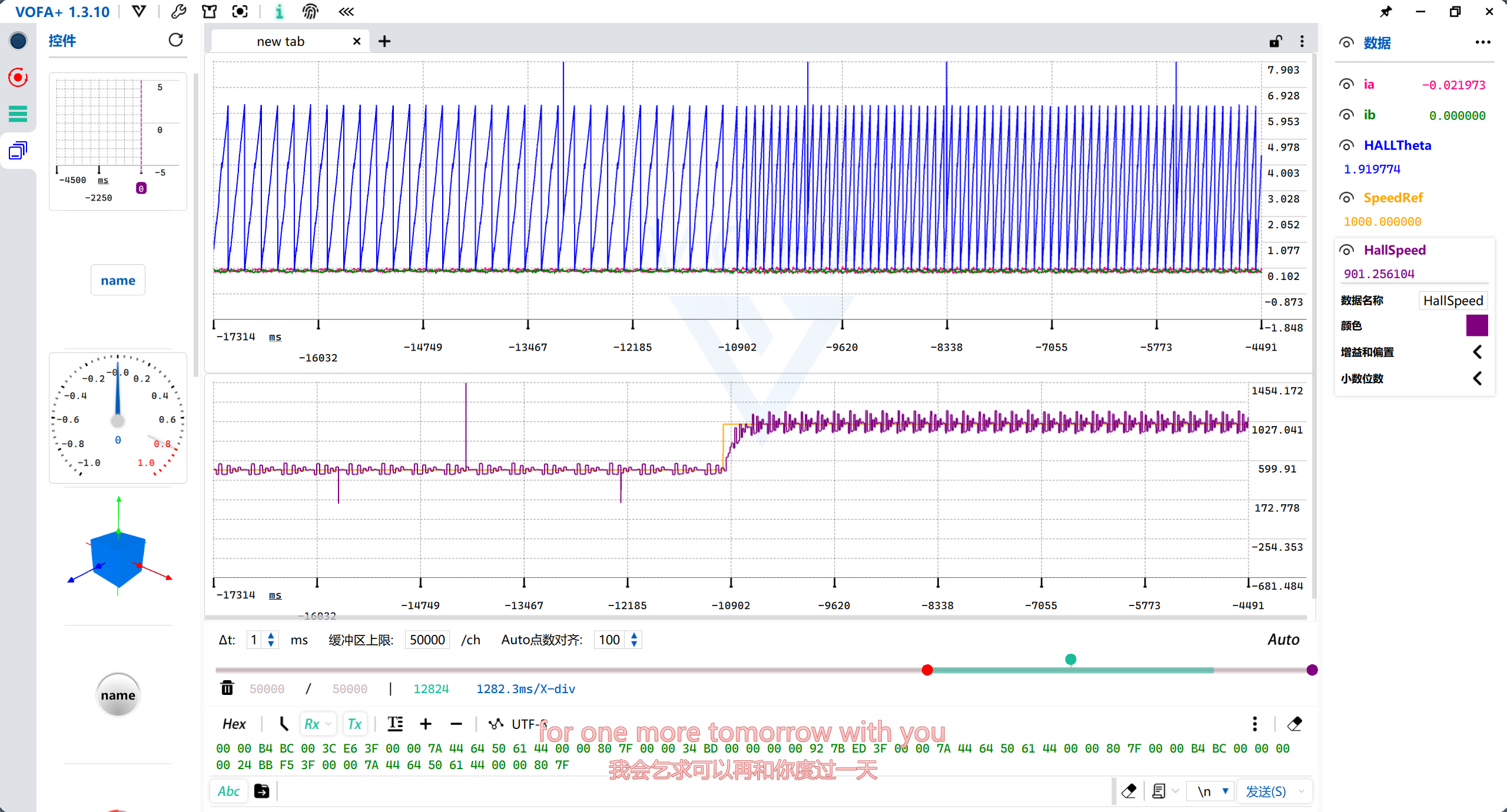
- 低速的时候跟踪的不是很好