自动驾驶启发式搜索算法(A星算法)详解
启发式搜索算法在自动驾驶系统中扮演着核心角色,主要用于实时路径规划、障碍物避让和全局导航。它通过引入启发式函数(heuristic function)来智能地引导搜索过程,减少计算开销,提高效率。下面,我将逐步详解其原理、常见算法(以A*算法为例)、在自动驾驶中的应用实现,并提供代码示例。内容基于可靠的理论和实践,确保结构清晰。
1. 启发式搜索算法基础
-
什么是启发式搜索?
启发式搜索是一种智能搜索方法,它利用问题域的先验知识(即启发式信息)来估计从当前状态到目标状态的最优路径。相比盲目搜索(如广度优先搜索),它能显著降低搜索空间和时间复杂度。核心思想是:优先探索"最有希望"的节点。
- 关键组件 :
- 代价函数 g(n)g(n)g(n):表示从起点到节点 nnn 的实际代价(如距离或时间)。
- 启发式函数 h(n)h(n)h(n):估计从节点 nnn 到目标的剩余代价(必须可接受,即 h(n)≤h(n) \leqh(n)≤ 实际代价)。
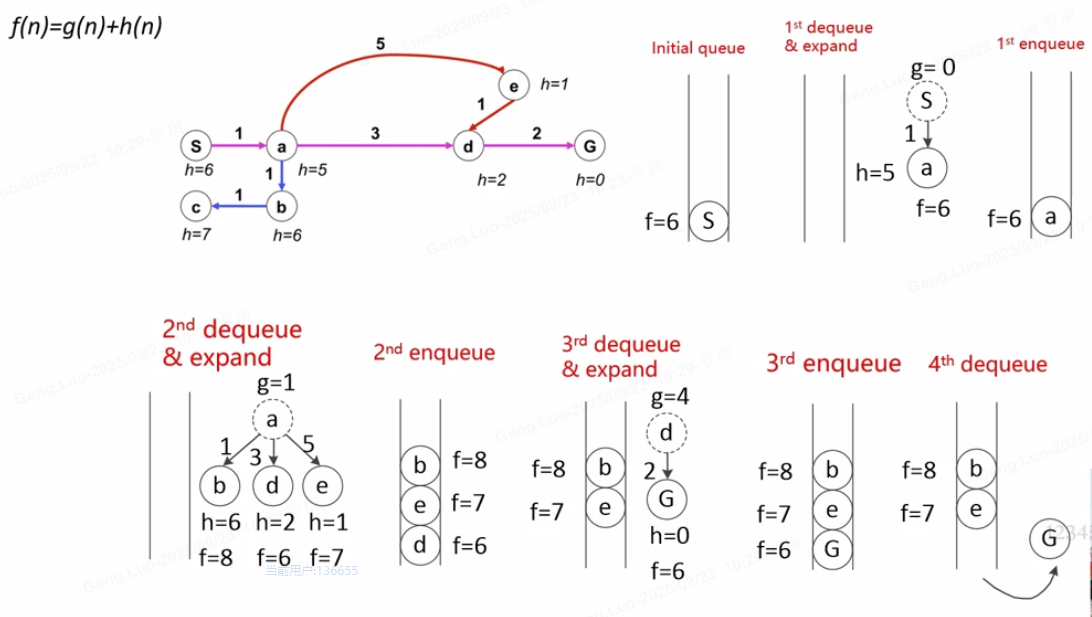
- 总代价函数 f(n)f(n)f(n):用于决策,定义为 f(n)=g(n)+h(n)f(n) = g(n) + h(n)f(n)=g(n)+h(n)。
- 例如,在路径规划中,h(n)h(n)h(n) 可以是欧几里得距离或曼哈顿距离,帮助算法快速收敛。
- 关键组件 :
-
为什么适合自动驾驶?
自动驾驶环境动态多变(如车辆、行人、交通灯),需要实时响应。启发式搜索能高效处理高维状态空间,确保路径安全、平滑且能量最优。常见场景包括:
- 全局路径规划:生成从A点到B点的最优路线。
- 局部避障:在感知到障碍物时,动态调整路径。
2. 核心算法:A*算法详解
A* 算法是最常用的启发式搜索算法,因其最优性和效率被广泛应用于自动驾驶。它基于图搜索模型,将环境建模为网格或图结构(节点表示位置,边表示可行路径)。
-
算法原理:
- A* 使用优先队列(如最小堆)管理节点,优先扩展 f(n)f(n)f(n) 最小的节点。
- 总代价公式为:
f(n)=g(n)+h(n)f(n) = g(n) + h(n)f(n)=g(n)+h(n)
其中:- g(n)g(n)g(n) 是实际累积代价(例如,从起点到 nnn 的移动距离)。
- h(n)h(n)h(n) 是启发式估计代价(例如,nnn 到目标的直线距离)。
- 启发式函数 h(n)h(n)h(n) 必须满足 可接受性 (admissible):h(n)≤h(n) \leqh(n)≤ 真实剩余代价,确保算法找到最优解。常用启发式包括:
- 曼哈顿距离:适用于网格地图,h(n)=∣xn−xg∣+∣yn−yg∣h(n) = |x_n - x_g| + |y_n - y_g|h(n)=∣xn−xg∣+∣yn−yg∣。
- 欧几里得距离:更精确,h(n)=(xn−xg)2+(yn−yg)2h(n) = \sqrt{(x_n - x_g)^2 + (y_n - y_g)^2}h(n)=(xn−xg)2+(yn−yg)2 。
- 算法步骤:
- 初始化:起点加入开放列表(open list),g(start)=0g(\text{start}) = 0g(start)=0,f(start)=h(start)f(\text{start}) = h(\text{start})f(start)=h(start)。
- 循环:从开放列表取出 f(n)f(n)f(n) 最小的节点 nnn。
- 如果 nnn 是目标,则回溯路径;否则,扩展 nnn 的邻居。
- 对每个邻居 mmm,计算新 g(m)=g(n)+cost(n,m)g(m) = g(n) + \text{cost}(n,m)g(m)=g(n)+cost(n,m) 和 f(m)=g(m)+h(m)f(m) = g(m) + h(m)f(m)=g(m)+h(m)。
- 如果 mmm 未在开放列表或新 f(m)f(m)f(m) 更小,则更新并加入开放列表。
- 重复直到找到目标或开放列表为空。
-
在自动驾驶中的优化:
- 动态环境处理:A* 可扩展为 D* 或 LPA* 算法,支持实时更新地图(如新增障碍物)。
- 启发式设计 :h(n)h(n)h(n) 可结合交通规则(如速度限制),h(n)=距离最大速度h(n) = \frac{\text{距离}}{\text{最大速度}}h(n)=最大速度距离,以优化时间代价。
- 效率分析 :时间复杂度为 O(bd)O(b^d)O(bd),其中 bbb 是分支因子,ddd 是解深度。但在良好启发式下,可降至 O(d)O(d)O(d)。
3. 在自动驾驶中的具体应用
自动驾驶系统将环境感知数据(如激光雷达、摄像头)转换为搜索图,A* 算法用于生成可行路径。
-
实现步骤:
- 环境建模 :将道路地图离散化为网格图,每个网格单元表示一个状态(例如,1×11 \times 11×1 米)。障碍物标记为不可通行。
- 代价定义 :
- g(n)g(n)g(n):基于移动距离(如单位网格代价为 1),或加入坡度、油耗等权重。
- h(n)h(n)h(n):使用欧几里得距离 h(n)=(xn−xg)2+(yn−yg)2h(n) = \sqrt{(x_n - x_g)^2 + (y_n - y_g)^2}h(n)=(xn−xg)2+(yn−yg)2 ,确保可接受性。
- 总代价 f(n)f(n)f(n) 指导搜索,最小化路径长度或时间。
- 实时规划 :
- 当传感器检测到障碍物时,算法重新计算 h(n)h(n)h(n) 并更新路径。
- 结合车辆动力学约束(如转弯半径),在扩展邻居时过滤无效节点。
- 输出:生成路径点序列,控制模块执行转向和加速。
-
优势与挑战:
- 优势 :高效、可证明最优(如果 h(n)h(n)h(n) 可接受),易于实现。
- 挑战:启发式设计不当可能导致次优解;高动态环境需算法变种(如 D*);计算资源需优化以适应实时性。
4. 代码示例:A*算法实现
以下是一个简化的 Python 实现,用于网格地图路径规划。假设地图为 2D 网格,0 表示可行,1 表示障碍物。使用曼哈顿距离作为启发式函数。
python
import heapq
def heuristic(a, b):
""" 曼哈顿距离启发式函数 """
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star(grid, start, goal):
""" A* 算法实现
:param grid: 2D 列表,0=可行, 1=障碍
:param start: 起点坐标 (x, y)
:param goal: 目标坐标 (x, y)
:return: 路径列表,从起点到目标
"""
# 初始化:方向向量(上、下、左、右)
neighbors = [(0, 1), (1, 0), (0, -1), (-1, 0)]
open_list = []
heapq.heappush(open_list, (0, start))
came_from = {}
g_score = {start: 0}
f_score = {start: heuristic(start, goal)}
while open_list:
current = heapq.heappop(open_list)[1]
if current == goal:
# 回溯路径
path = []
while current in came_from:
path.append(current)
current = came_from[current]
path.append(start)
return path[::-1] # 反转路径
for dx, dy in neighbors:
neighbor = (current[0] + dx, current[1] + dy)
# 检查边界和障碍
if (0 <= neighbor[0] < len(grid) and
0 <= neighbor[1] < len(grid[0]) and
grid[neighbor[0]][neighbor[1]] == 0):
tentative_g = g_score[current] + 1 # 假设每步代价为1
if neighbor not in g_score or tentative_g < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g
f_score[neighbor] = tentative_g + heuristic(neighbor, goal)
heapq.heappush(open_list, (f_score[neighbor], neighbor))
return None # 无路径
# 示例用法
if __name__ == "__main__":
grid = [
[0, 0, 0, 0],
[0, 1, 1, 0], # 1表示障碍物
[0, 0, 0, 0]
]
start = (0, 0)
goal = (2, 3)
path = a_star(grid, start, goal)
print("路径:", path) # 输出:[(0,0), (1,0), (2,0), (2,1), (2,2), (2,3)]- 代码解释 :
heuristic函数计算曼哈顿距离 ∣x1−x2∣+∣y1−y2∣|x_1 - x_2| + |y_1 - y_2|∣x1−x2∣+∣y1−y2∣。- 算法使用优先队列(heapq)管理开放列表,确保高效。
- 输出路径为坐标序列,可直接用于车辆控制。
- 在实际自动驾驶中,需扩展为处理连续空间(如使用样条曲线平滑路径)。
5. 总结与扩展
启发式搜索算法(特别是A*)是自动驾驶路径规划的基石,它平衡了最优性和实时性。通过精心设计启发式函数,算法能适应复杂环境。未来方向包括:
- 结合机器学习:用数据驱动 h(n)h(n)h(n) 的学习(如强化学习)。
- 多算法融合:A* 与 RRT(快速随机树)结合,处理高不确定性。
- 硬件加速:GPU 并行化提升计算速度。
特定场景(如城市道路或高速公路)也采用算法变种(如D*)。