一、理论知识
1、问题背景
在传统信号处理理论中,奈奎斯特采样定理指出:
采样频率 ≥ 信号最高频率的 2 倍,才能无失真重建信号
必须获取完整、均匀的采样数据
2、压缩感知的核心目标
在观测数量远小于信号维度的条件下,准确恢复原始信号。
3、稀疏性假设
(1)稀疏性的定义
信号 x ∈{R}^N 在某一表示空间中是稀疏的,x只有稀疏度k个非零元素:∥x∥0=k≪N
(2)变换域稀疏性
一般信号 不必在原始空间稀疏,但可在某一变换基下稀疏表示:x = A^T s
A∈{R}^{N × N}:正交变换基(如 DCT、小波);s:稀疏系数向量
4、压缩感知采样模型
y = Φx , Φ ∈ {R}^{M × N} , M≪N
Φ:测量矩阵;y:压缩观测向量
5、压缩感知成立的关键条件
(1)条件一:信号稀疏或可稀疏表示
信号在某一正交基或过完备字典下具有稀疏结构。
(2)条件二:测量矩阵的非相关性
测量矩阵 Φ 与稀疏基 A 之间应尽可能不相关,常用选择包括:高斯随机矩阵、Bernoulli 随机矩阵
该条件在理论上通常由 Restricted Isometry Property 描述。
6、稀疏重建的优化模型
(1)理想模型(L0 最小化)
min x ∥x∥0 s.t. y=Φx
该问题是 NP-hard,不可直接求解。
(2)凸松弛模型(L1 最小化)
min x ∥x∥1 s.t. y=Φx
在满足稀疏性和测量条件时,有理论保证:L1 最优解等价于 L0 最优解
这是压缩感知理论的核心结果。
| 范式 | 计算方法 | 优化偏好 | 是否产生稀疏解 | 典型应用 |
|---|---|---|---|---|
| L0 | 非零元素的个数 | 非零元素越少越好 | 是(最稀疏) | 理想压缩感知模型、稀疏表示理论 |
| L1 | 每个元素取绝对值并求和 | 用尽量少的非零系数表示信号 | 是(可计算) | 压缩感知(BP / LASSO)、稀疏重建 |
| L2 | 每个元素平方后求和再开方(或平方和) | 整体能量小、解平滑稳定 | 否 | 最小二乘、岭回归、去噪、平滑重建 |
7、总结
-
利用信号结构减少冗余采样
-
本质是:欠定线性系统 + 稀疏先验 + L1 优化
题一
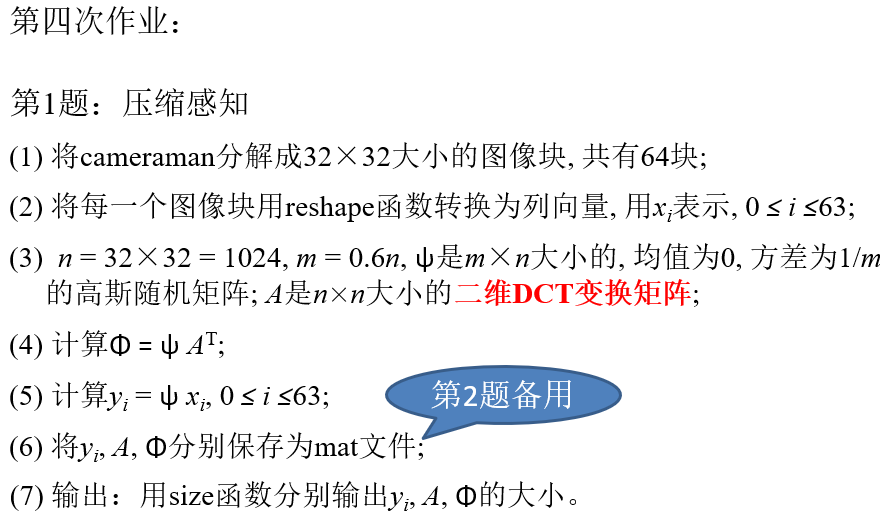
1、分析
(1)块级压缩感知
(2)把二维图像,变成一维信号
(3)x原始信号,y观测,ψ测量矩阵,y=Ψx;高斯随机矩阵和任何稀疏基都"不对齐"
A稀疏表示基,s系数
二维 DCT(Discrete Cosine Transform)离散余弦变换:
把一块图像,用一组"从平滑到剧烈变化"的余弦基函数来表示,变换域表示
(4)测量 + 稀疏基 合并成一个等效测量矩阵
2、MATLAB代码
Matlab
%% 压缩感知 ------ Cameraman 图像块的随机测量
clear; clc; close all;
%% (1) 读取 cameraman 图像
img = im2double(imread('cameraman.tif')); % 256×256
[H, W] = size(img);
block_size = 32;
num_blocks = (H / block_size) * (W / block_size); % 64
%% (2) 将图像分解为 32×32 块,并 reshape 为列向量
n = block_size * block_size; % 1024
X = zeros(n, num_blocks); % 存储所有 xi
% 复杂度:整图 256^2 = 65536,分块 32^2 = 1024
% 整张结构复杂;分块纹理更简单,更稀疏
idx = 1;
for i = 1:block_size:H
for j = 1:block_size:W
block = img(i:i+block_size-1, j:j+block_size-1);
xi = reshape(block, [], 1); % 1024×1
X(:, idx) = xi;
idx = idx + 1;
end
end
%% (3) 构造测量矩阵 ψ 和二维 DCT 变换矩阵 A
% 观测数m < 原始维度n
m = round(0.6 * n); % 614
% ψ:m×n 高斯随机矩阵,均值 0,方差 1/m
psi = sqrt(1/m) * randn(m, n);
% A:n×n 二维 DCT 变换矩阵
D = dctmtx(block_size); % 32×32 的 1D DCT
A = kron(D, D); % Kronecker 积 → 1024×1024
%% (4) 计算 Φ = ψ A^T
% x = A^T s,A稀疏表示基,s稀疏系数
Phi = psi * A';
%% (5) 计算 yi = ψ xi
Y = psi * X; % 每一列是一个 yi(m×64)
%% (6) 保存 yi, A, Φ
save('yi.mat', 'Y');
save('A.mat', 'A');
save('Phi.mat', 'Phi');
%% (7) 输出大小
disp('--- 矩阵大小 ---');
disp(['yi 的大小: ', mat2str(size(Y))]);
disp(['A 的大小: ', mat2str(size(A))]);
disp(['Phi 的大小:', mat2str(size(Phi))]);3、运行结果

bash
yi 的大小: [614 64]
A 的大小: [1024 1024]
Phi 的大小:[614 1024]题二
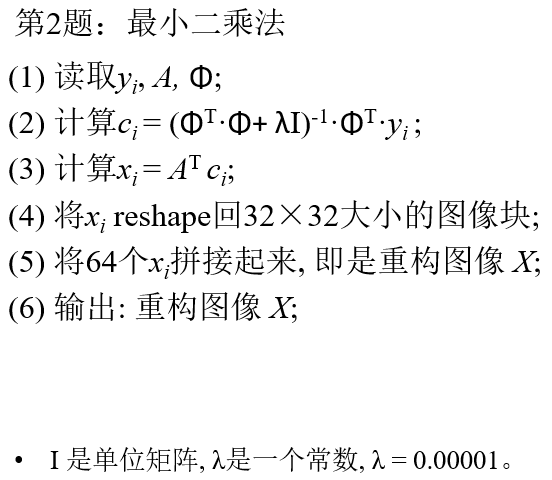
1、分析
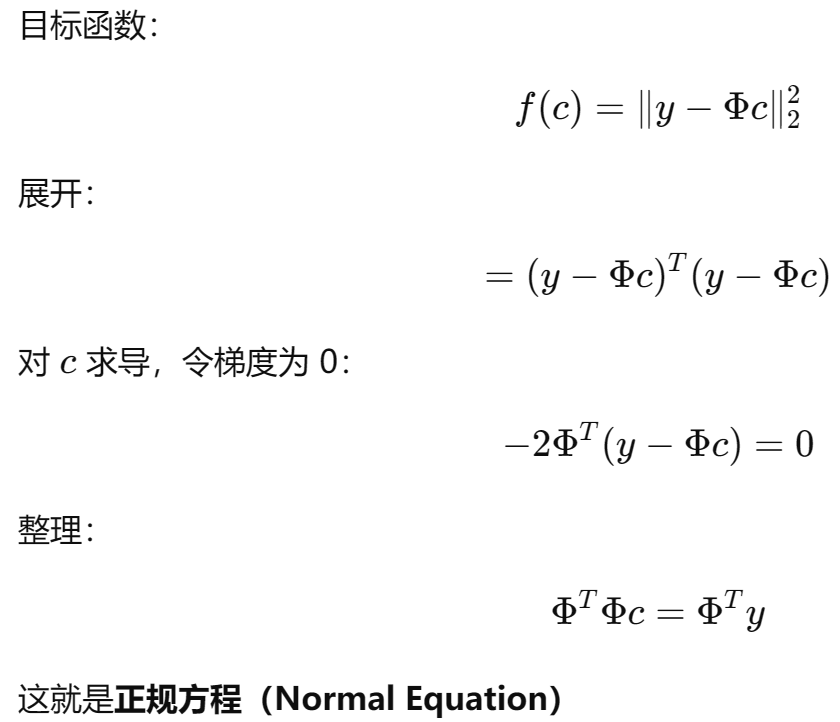
用最小二乘(带正则)的方法,在 DCT 域估计系数,再反变换得到图像
(2)最小二乘法计算系数
2、MATLAB代码
Matlab
%% 第2题:最小二乘法重构,欠定线性系统的正则化解
clear; clc; close all;
%% (1) 读取数据
load('yi.mat'); % Y: m×64
load('A.mat'); % A: 1024×1024
load('Phi.mat'); % Phi: m×1024
[m, num_blocks] = size(Y);
n = size(A, 1);
block_size = 32;
lambda = 1e-5;
%% 预分配
X_rec_blocks = zeros(n, num_blocks);
%% 预计算公共项(加速)
I = eye(n);
PhiTPhi = Phi' * Phi;
PhiTY = Phi' * Y;
%% (2)(3) 对每个块做最小二乘 + 反变换
for i = 1:num_blocks
yi = Y(:, i);
% 最小二乘解(DCT 域)
ci = (PhiTPhi + lambda * I) \ PhiTY(:, i);
% 反 DCT 得到图像块,A^T DCT逆变换
xi = A' * ci;
X_rec_blocks(:, i) = xi;
end
%% (4)(5) reshape 并拼接图像
img_rec = zeros(256, 256);
idx = 1;
for i = 1:block_size:256
for j = 1:block_size:256
block = reshape(X_rec_blocks(:, idx), block_size, block_size);
img_rec(i:i+block_size-1, j:j+block_size-1) = block;
idx = idx + 1;
end
end
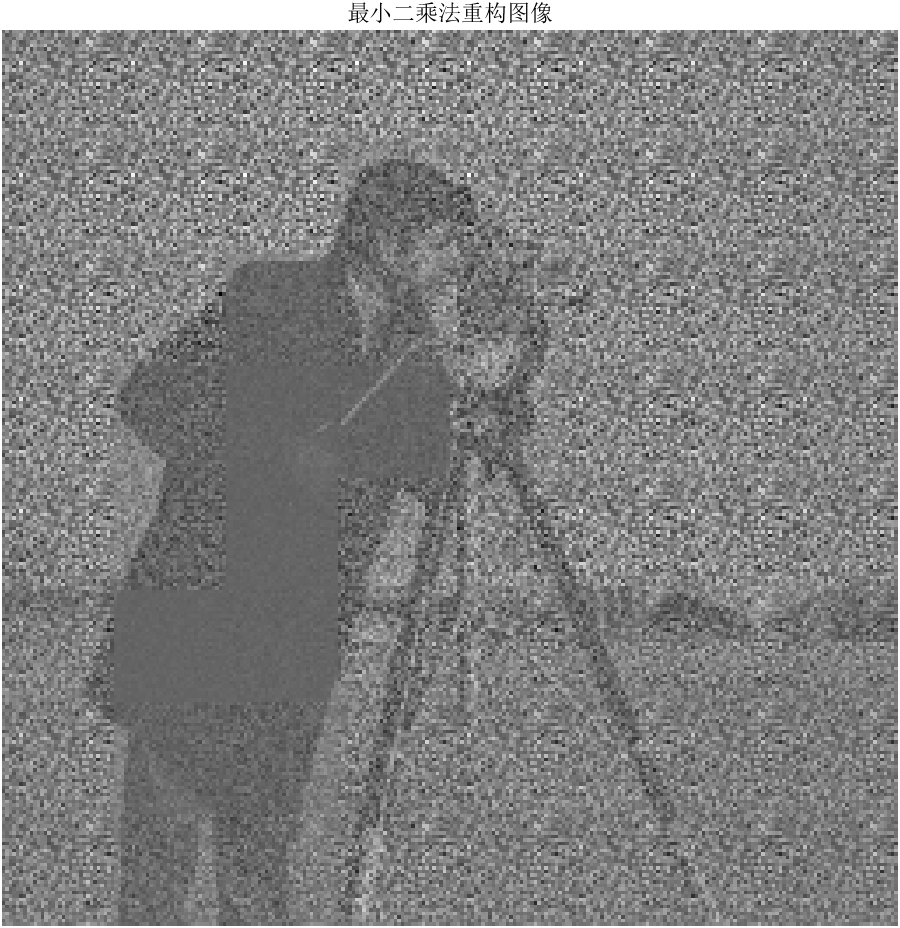
%% (6) 输出重构图像
figure;
imshow(img_rec, []);
title('最小二乘法重构图像');3、运行结果
题三
1、分析
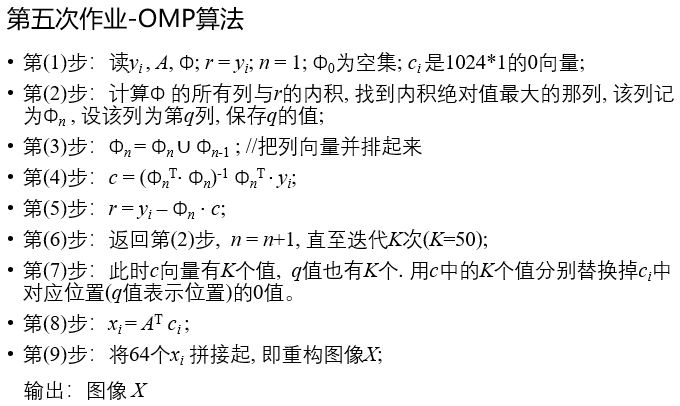
OMP(Orthogonal Matching Pursuit)贪婪算法,每一步选择一个"当前最相关"的基向量,
并在已选子空间上做最小二乘修正。
用 OMP 算法在 Φ 的列中逐步选出 K 个"最相关原子"
(1)r残差,Φn当前选中的"原子集合",ci稀疏系数
(2)内积为相似度,和当前残差最像的基向量
(3)更新支持集
(4)所有已选列的子空间中,做一次最小二乘,当前残差与已选子空间正交
(5)更新残差,把已解释的部分"减掉"
(6)K为稀疏度,人为限定,对 L0 的近似控制
(7)填充完整的稀疏系数
(8)反DCT
(9)拼接
2、MATLAB代码
Matlab
%% 第3题:OMP 算法重构
clear; clc; close all;
%% (1) 读取数据
load('yi.mat'); % Y: m × 64
load('A.mat'); % A: 1024 × 1024
load('Phi.mat'); % Phi: m × 1024
[m, num_blocks] = size(Y);
n = size(A, 1);
block_size = 32;
K = 50; % 稀疏度(迭代次数)
%% 预分配
X_rec_blocks = zeros(n, num_blocks);
%% 对每一个图像块做 OMP
for blk = 1:num_blocks
%% -------- 第 (1) 步:初始化 --------
yi = Y(:, blk);
r = yi; % 残差
index_set = []; % 已选列索引
Phi_selected = []; % Φn
c_selected = []; % 已选系数
%% -------- 第 (2)--(6) 步:OMP 迭代 --------
for k = 1:K
% (2) 计算所有列与残差的内积
correlations = Phi' * r;
% 找到绝对值最大的列
[~, q] = max(abs(correlations));
% (3) 更新支持集
index_set = [index_set, q];
Phi_selected = [Phi_selected, Phi(:, q)];
% (4) 正交最小二乘求系数
c_selected = (Phi_selected' * Phi_selected) \ ...
(Phi_selected' * yi);
% (5) 更新残差
r = yi - Phi_selected * c_selected;
end
%% -------- 第 (7) 步:构造完整稀疏系数 ci --------
ci = zeros(n, 1);
ci(index_set) = c_selected;
%% -------- 第 (8) 步:反 DCT --------
xi = A' * ci;
X_rec_blocks(:, blk) = xi;
end
%% -------- 第 (9) 步:拼接图像 --------
img_rec = zeros(256, 256);
idx = 1;
for i = 1:block_size:256
for j = 1:block_size:256
block = reshape(X_rec_blocks(:, idx), block_size, block_size);
img_rec(i:i+block_size-1, j:j+block_size-1) = block;
idx = idx + 1;
end
end
%% 输出重构图像
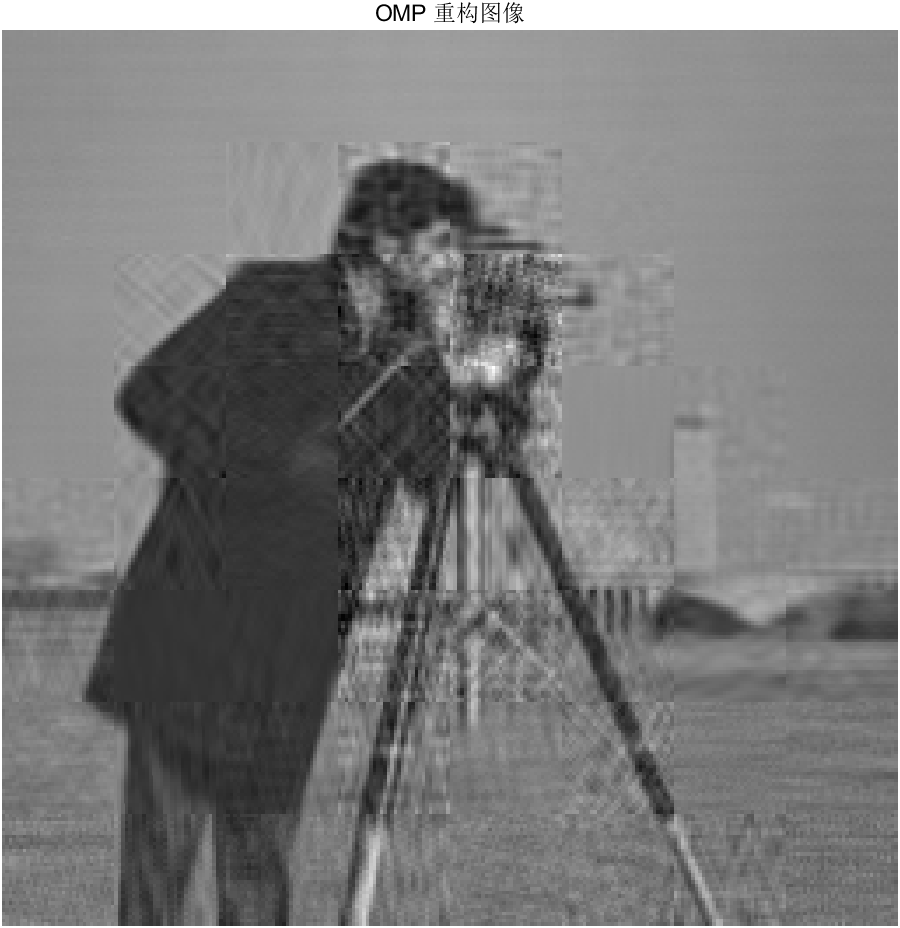
figure;
imshow(img_rec, []);
title('OMP 重构图像');3、运行结果
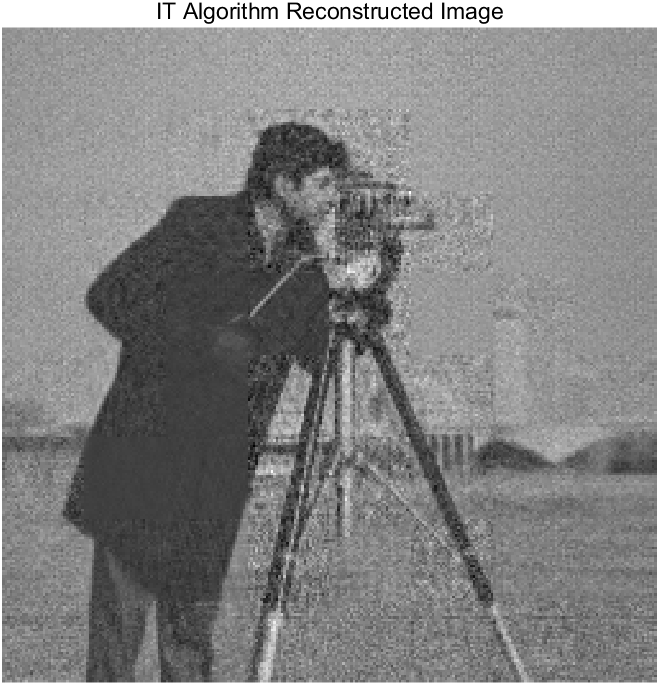
题四
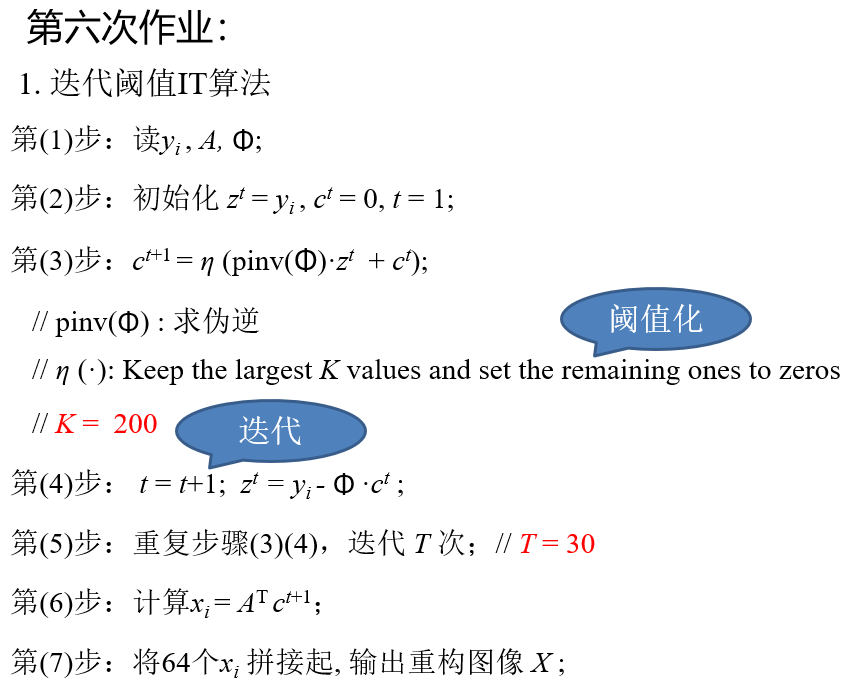
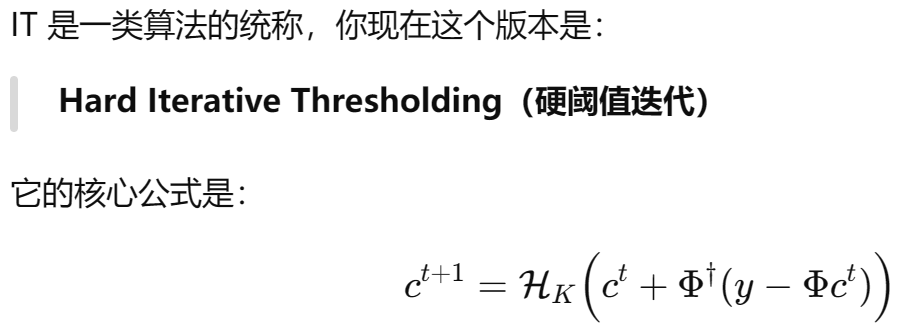
1、分析:迭代阈值算法IT(Iterative Thresholding)
用梯度下降往正确方向走 + 每一步强制只有 K 个非零系数
(2)zt残差,ct稀疏系数,t迭代
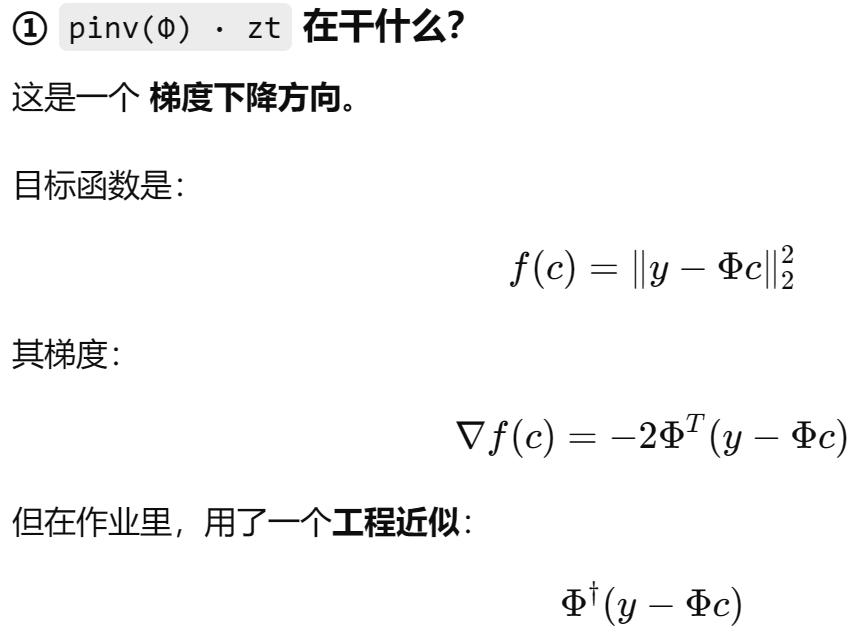
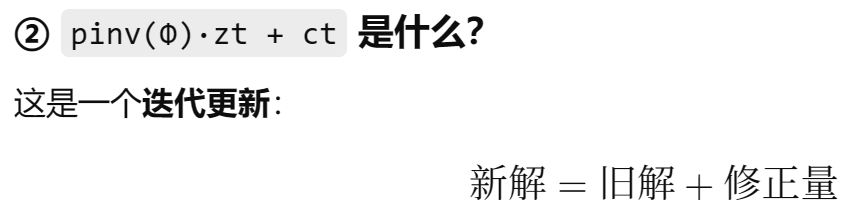
(3)分析
(4)更新残差
LS:只考虑误差
OMP:一次选一个最好的方向("一个一个选")
IT:全局修正 + 强制稀疏("每次全部算完再砍掉小的")
2、MATLAB代码
Matlab
clc; clear; close all;
%% 1. 读取数据
load yi.mat % yi: m × 64
load Phi.mat % Phi: m × n
load A.mat % A: n × n
[m, num_blocks] = size(Y);
n = size(A, 1);
%% 2. IT 参数设置
K = 200; % 保留最大 K 个系数
T = 30; % 迭代次数
X_rec = zeros(256, 256); % 重构图像
block_size = 32;
block_idx = 1;
%% 3. 逐块重建
for i = 1:8
for j = 1:8
% 当前块的观测
y = Y(:, block_idx);
% 初始化
z = y; % 残差
c = zeros(n, 1); % 稀疏系数
t = 1;
%% IT 主循环
while t <= T
% 梯度更新 + 阈值
c_temp = pinv(Phi) * z + c;
c = hard_threshold(c_temp, K);
% 更新残差
z = y - Phi * c;
t = t + 1;
end
% 反 DCT 变换
x = A' * c;
x_block = reshape(x, block_size, block_size);
% 拼接图像
X_rec((i-1)*32+1:i*32, (j-1)*32+1:j*32) = x_block;
block_idx = block_idx + 1;
end
end
%% 4. 显示结果
figure;
imshow(X_rec, []);
title('IT Algorithm Reconstructed Image');
%% --------- 硬阈值函数 ---------
function y = hard_threshold(x, K)
% 保留绝对值最大的 K 个元素,其余置零
[~, idx] = sort(abs(x), 'descend');
y = zeros(size(x));
y(idx(1:K)) = x(idx(1:K));
end3、结果
题五
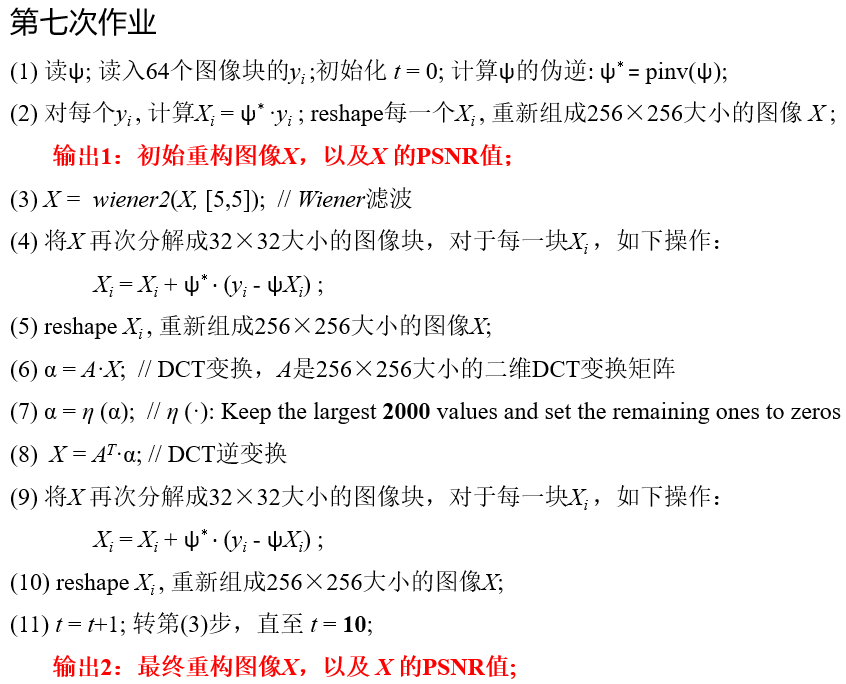
1、分析
多先验 + 交替投影 + 去噪约束 的改进型 IT 重建框架
测量一致
→ Wiener 去噪
→ 块级测量修正
→ 全图 DCT 稀疏
→ 再测量修正
→ 循环
(1)伪逆给出的,是"在所有解中,L2 范数最小的那个解",(2)等价于最小二乘解
在 L2 意义下,最快、最直接地减少测量误差
(3)在保持图像结构的同时,抑制由欠采样和伪逆引入的噪声,非线性去噪先验。
Wiener 滤波是一种在"最小均方误差(MMSE)意义下最优"的去噪滤波方法。
(4)经过Wienner或者DCT之后,通常不再满足ψXi = yi,ψ* 把残差拉回图像X的空间,测量一致性修正
(6)整图 DCT 变换(全局稀疏性)
(7)只保留最大的 2000 个系数,频域硬阈值,L0 先验
(8)逆 DCT
(9)测量一致性修正,同(4)
2、MATLAB代码
Matlab
clc; clear; close all;
%% ========== 1. 读取数据 ==========
load yi.mat % Y: m × 64
load psi.mat % psi: m × 1024
load A.mat % A: 1024 × 1024
img_gt = im2double(imread('cameraman.tif')); % Ground truth
[H, W] = size(img_gt);
block_size = 32;
num_blocks = 64;
n = block_size^2;
psi_pinv = pinv(psi); % ψ*
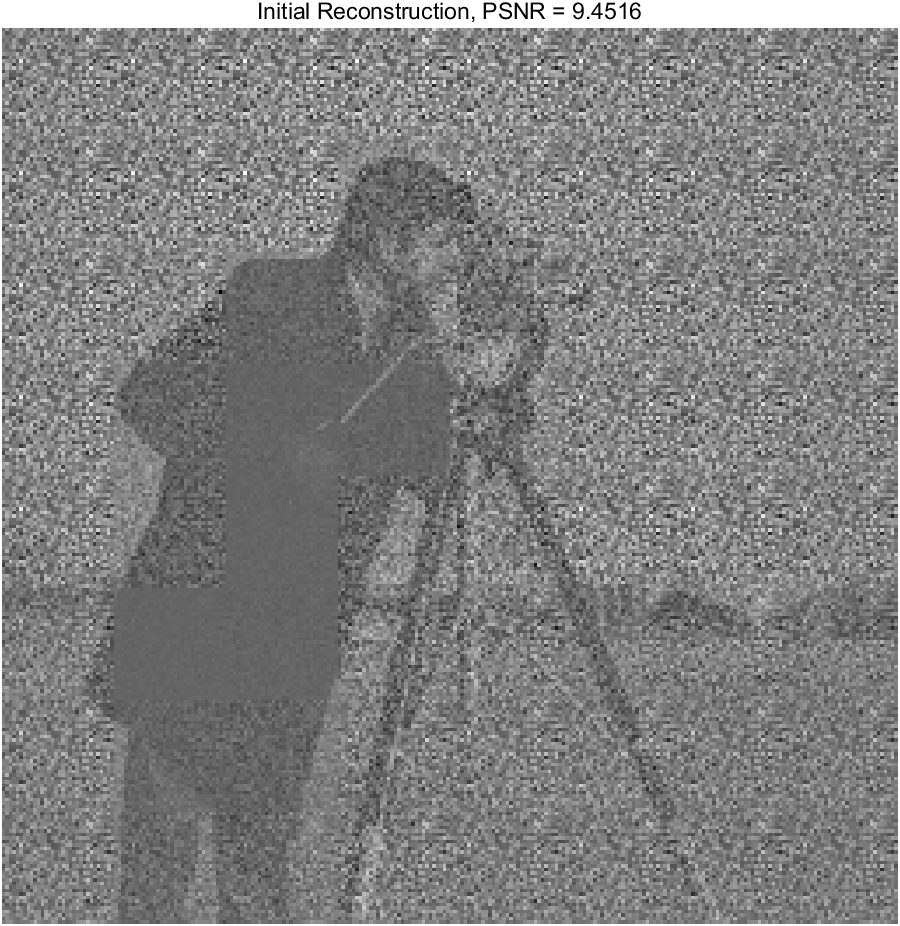
%% ========== 2. Step (2): 初始最小二乘重构 ==========
X_init = zeros(H, W);
idx = 1;
for i = 1:8
for j = 1:8
y = Y(:, idx);
Xi = psi_pinv * y; % 最小二乘
Xi = reshape(Xi, block_size, block_size);
X_init((i-1)*32+1:i*32, (j-1)*32+1:j*32) = Xi;
idx = idx + 1;
end
end
% PSNR
psnr_init = psnr(X_init, img_gt);
figure;
imshow(X_init, []);
title(['Initial Reconstruction, PSNR = ', num2str(psnr_init)]);
%% ========== 3. 改进 IT 迭代 ==========
X = X_init;
T = 10; % 外层迭代次数
K = 2000; % 全图 DCT 稀疏度
for t = 1:T
%% (3) Wiener 去噪
X = wiener2(X, [5 5]);
%% (4) 块级测量一致性修正
idx = 1;
for i = 1:8
for j = 1:8
Xi = X((i-1)*32+1:i*32, (j-1)*32+1:j*32);
xi = Xi(:);
y = Y(:, idx);
% 测量一致性修正
xi = xi + psi_pinv * (y - psi * xi);
% 回写
X((i-1)*32+1:i*32, (j-1)*32+1:j*32) = reshape(xi, 32, 32);
idx = idx + 1;
end
end
%% (6) 全图 DCT 稀疏约束
alpha = dct2(X);
alpha = hard_threshold(alpha, K);
X = idct2(alpha);
%% (9) 再一次测量一致性修正
idx = 1;
for i = 1:8
for j = 1:8
Xi = X((i-1)*32+1:i*32, (j-1)*32+1:j*32);
xi = Xi(:);
y = Y(:, idx);
xi = xi + psi_pinv * (y - psi * xi);
X((i-1)*32+1:i*32, (j-1)*32+1:j*32) = reshape(xi, 32, 32);
idx = idx + 1;
end
end
end
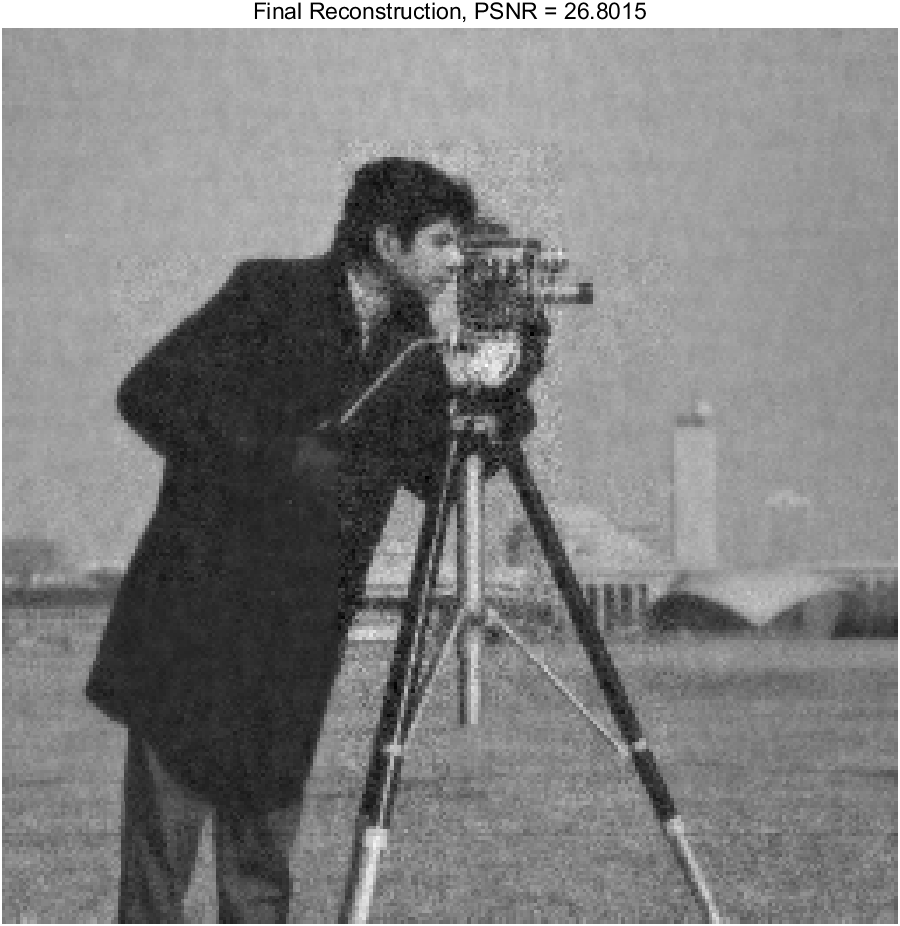
%% ========== 4. 输出最终结果 ==========
psnr_final = psnr(X, img_gt);
figure;
imshow(X, []);
title(['Final Reconstruction, PSNR = ', num2str(psnr_final)]);
%% --------- 硬阈值函数 ---------
function y = hard_threshold(x, K)
% 保留绝对值最大的 K 个元素
x_vec = x(:);
[~, idx] = sort(abs(x_vec), 'descend');
y_vec = zeros(size(x_vec));
y_vec(idx(1:K)) = x_vec(idx(1:K));
y = reshape(y_vec, size(x));
end3、结果