在第四章中,我们通过在顶点函数中简单地计算位置数据,实现了模型的位移。但如果要在 3D 空间中执行更复杂的任务,例如旋转和缩放,并最终引入场景中的摄影机,矩阵(Matrices)是不可或缺的工具。
本章将详细讲解如何使用矩阵来实现这些 3D 变换。一旦掌握了对单个三角形的矩阵操作,将其扩展到包含数千个顶点的模型将非常简单。
一、 变换概述(Transformations)
变换(Transformations) 是对 3D 几何图形进行操作的过程。本章讨论的变换属于 仿射变换(Affine Transformations),这意味着在应用变换后,所有平行线依然保持平行。
核心的 3D 变换包括:位移(Translation)、缩放(Scale)和旋转(Rotation)。
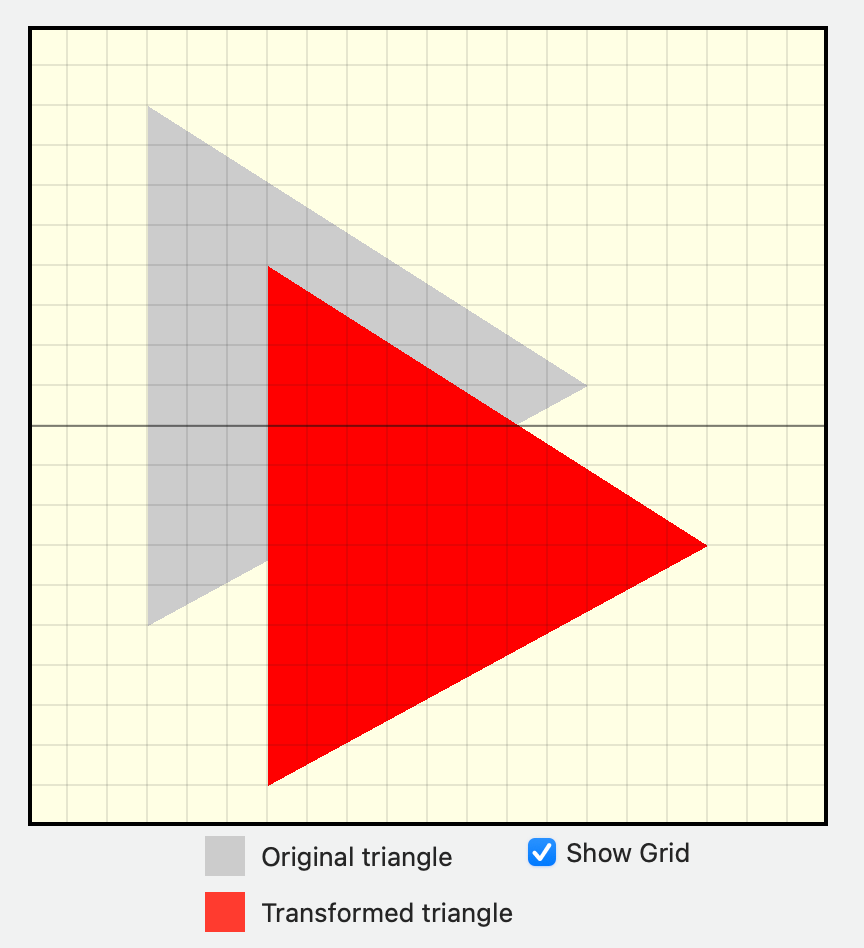
二、 位移(Translation)
在第四章中,我们通过简单地将位移向量添加到顶点位置来实现位移。然而,在现代计算机图形学中,更常见的方法是:将包含模型当前位置、旋转和缩放信息的矩阵发送给顶点着色器。
1. 创建矩阵(Creating a Matrix)
在 Metal 中,变换操作通过 4×44 \times 44×4 矩阵来实现。
- 单位矩阵(Identity Matrix) :这是所有变换的起点。它是一个 4x4 矩阵,主对角线上的元素是 111,其余元素为 000。
- 在 Swift 端,我们定义一个
matrix_float4x4并初始化为单位矩阵。
- 在 Swift 端,我们定义一个
- 位移向量 :在 4x4 矩阵中,位移向量(x,y,zx, y, zx,y,z)存储在矩阵的第四列 的 x,y,zx, y, zx,y,z 分量中。
将矩阵发送到着色器:
- Swift 端 :使用
renderEncoder.setVertexBytes将matrix_float4x4类型的matrix发送到缓冲区索引 11。 - 着色器端 :顶点函数通过
[[buffer(11)]]限定符接收constant float4x4 &matrix。
2. 矩阵乘法应用
为了将位移应用于顶点,着色器将从简单相加改为执行矩阵乘法:
translation=matrix×in.position\text{translation} = \text{matrix} \times \text{in.position}translation=matrix×in.position
此时,in.position(顶点原始位置)被视为一个 4×14 \times 14×1 的向量,并与 4×44 \times 44×4 的变换矩阵相乘。
swift
var vertices: [Float] = [
-0.7, 0.8, 0,
-0.7, -0.5, 0,
0.4, 0.1, 0
]
let translateX: Float = 0.3
let translateY: Float = -0.4
let translationMatrix = float4x4(
[1, 0, 0, 0],
[0, 1, 0, 0],
[0, 0, 1, 0],
[translateX, translateY, 0, 1])注意,OpenGL、Metal 以及 Swift 的 SIMD 库都使用列主序存储,因为计算机的内存是一维的、线性的,所以 translateX, translateY, 0, 1 其实对应的是第四列。
三、 缩放(Scaling)
缩放操作的实现与位移类似,但其值位于矩阵的不同位置。
- 缩放矩阵的结构 :缩放因子位于矩阵的对角线 上。例如,要在 X,Y,ZX, Y, ZX,Y,Z 轴上分别缩放 Sx,Sy,Sz\text{Sx}, \text{Sy}, \text{Sz}Sx,Sy,Sz,只需将它们放置在矩阵第一、第二和第三列的对角线位置。
- 组合变换 :要实现缩放后的位移,需要将位移矩阵乘以缩放矩阵。在 Metal 的矩阵乘法中,顺序很重要。例如,
matrix = translation * scaleMatrix会将缩放后的三角形进行位移。
swift
let scaleX: Float = 0.5
let scaleY: Float = 0.5
let scaleMatrix = float4x4(
[scaleX, 0, 0, 0],
[0, scaleY, 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1])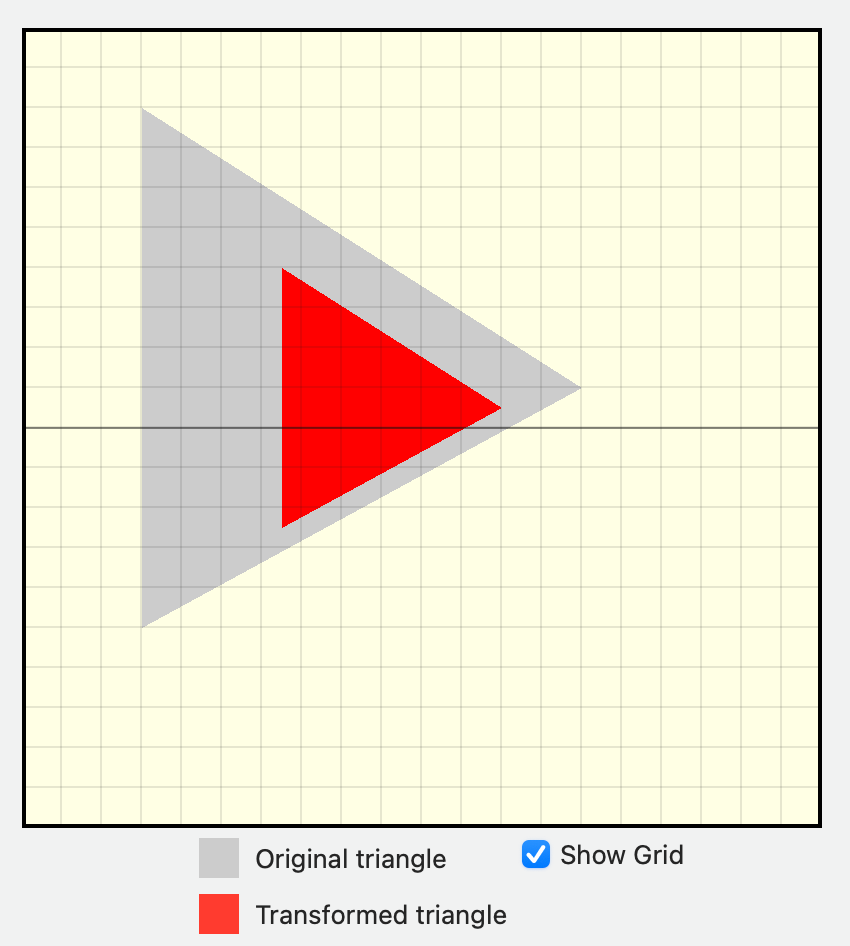
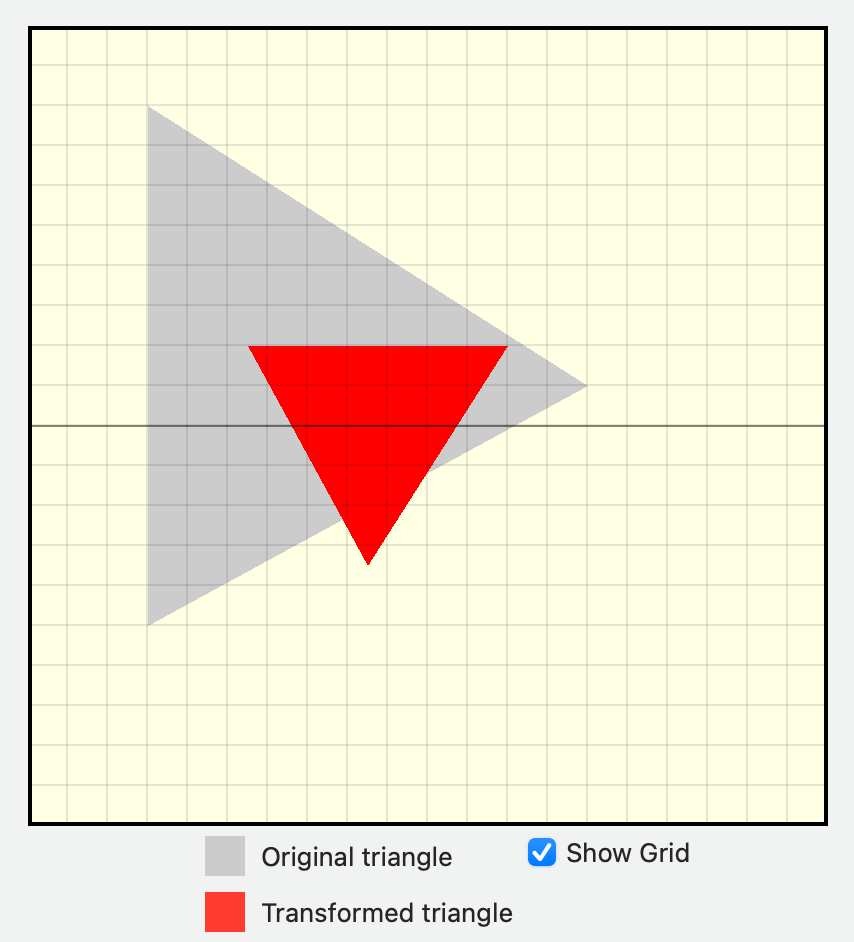
四、 旋转(Rotation)
旋转操作的实现方式与缩放类似。
- 旋转矩阵:通常围绕 Z 轴定义旋转角度。
- 单位 :计算机图形学中,标准单位是 弧度(radians) 。Metal 使用
Float.pi / 2.0来表示 90∘90^{\circ}90∘。 - 绕原点旋转 :默认的旋转矩阵操作总是围绕 原点 $$ 进行。
swift
let angle = Float.pi / 2.0
let rotationMatrix = float4x4(
[cos(angle), -sin(angle), 0, 0],
[sin(angle), cos(angle), 0, 0],
[0, 0, 1, 0],
[0, 0, 0, 1])注意,Metal 是左手坐标系,从观察者视角来看,是顺时针旋转,但是从z轴方向看(人站在z轴正方向无穷远处顺着负方向看)是逆时针旋转。

绕任意点旋转(Rotation About a Point)
如果需要围绕模型的某个特定点(而不是原点)进行旋转,需要一个三步序列的组合变换:
- 平移到原点 :使用位移矩阵 T−1T^{-1}T−1 将旋转中心点移动到原点。
- 旋转 :应用旋转矩阵 RRR。
- 平移回去 :应用逆位移矩阵 TTT 将所有点移回原位。
最终的变换矩阵是这三个操作的乘积:
Final Matrix=T×R×T−1\text{Final Matrix} = T \times R \times T^{-1}Final Matrix=T×R×T−1
在 Swift/Metal 中实现此操作时,需要首先计算出将目标旋转点移动到原点所需的位移矩阵 TTT,然后通过调用 translation.inverse 来获取 T−1T^{-1}T−1。
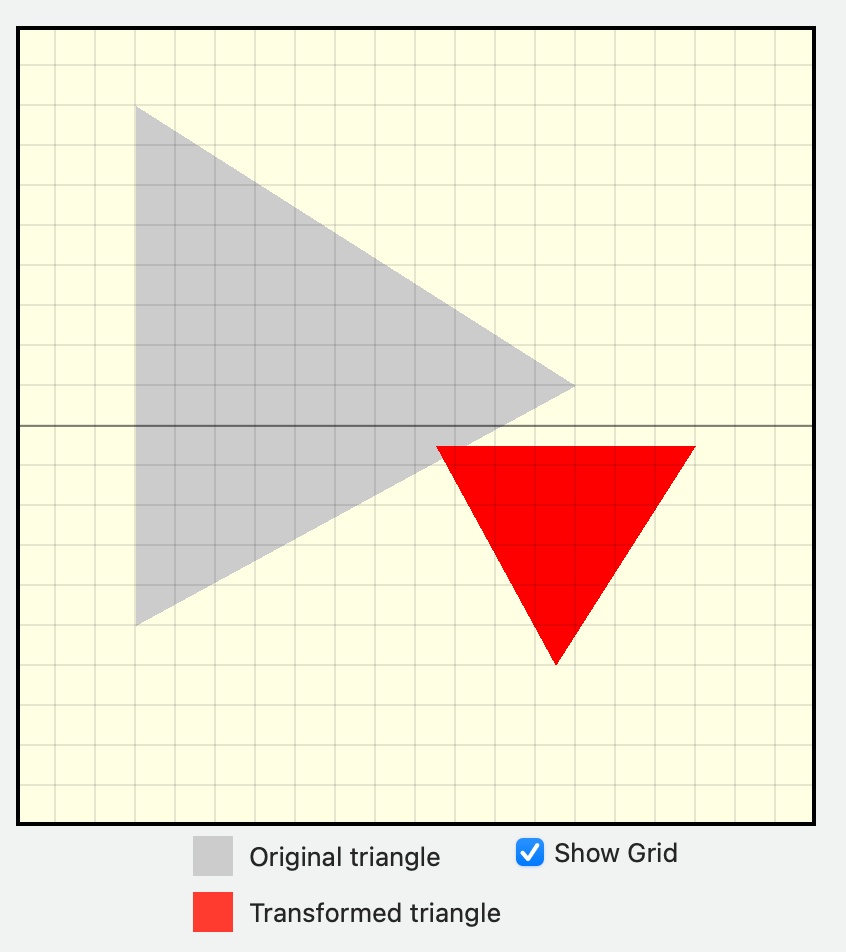
五、 组合
- scaleMatrix * rotationMatrix * translationMatrix
- translationMatrix * rotationMatrix * scaleMatrix
六、 Metal 变换总结(Key Points)
- 向量与矩阵:向量是只有一行或一列的矩阵。
- 组合变换:通过组合位移、旋转和缩放这三个矩阵,可以将模型定位在场景中的任何位置。
- 顶点函数:顶点函数负责接收这个组合变换矩阵,并通过矩阵乘法计算出每个顶点在裁剪空间中的最终位置。
- 数学基础:虽然 Metal API 抽象了大部分数学细节,但理解线性代数(特别是向量和矩阵的视觉意义)对于创造性地使用变换至关重要。
七、 Metal 与 OpenGL 变换概念对比
Metal 和 OpenGL 在实现 3D 变换时,核心数学原理(矩阵乘法)是相同的,但 API 级别上存在显著的工具和哲学差异。
| 概念 | Metal (SIMD, MSL) | OpenGL (GLM, GLSL) | 核心差异 |
|---|---|---|---|
| 数学库 | 依赖于 Apple 的 SIMD 框架 (如 matrix_float4x4)和 Metal Shading Language (MSL) 的内置类型。 |
依赖于第三方数学库,最常见的是 GLM (OpenGL Mathematics)。GLM 是专为 OpenGL 定制的头文件库,提供了矩阵和向量操作。 | Metal 自带数学类型;OpenGL 需要外部库。 |
| 矩阵定义 | 矩阵和向量类型在 Swift 和 MSL 中原生支持(例如 float4x4)。 |
GLSL 提供了 mat4 和 vec4 等类型。C++ 主程序通常使用 GLM 定义 glm::mat4。 |
|
| 矩阵传输 | 矩阵通常通过 renderEncoder.setVertexBytes 或作为 MTLBuffer 中的 Uniforms 结构体发送到着色器。 |
矩阵通过 Uniform 变量发送到 GLSL 着色器。需要使用如 glUniformMatrix4fv 这样的函数来发送数据。 |
|
| 矩阵乘法 | 在 MSL 顶点函数中执行乘法:float4 position = matrix * in.position。 |
在 GLSL 顶点着色器中执行乘法:gl_Position = transform * vec4(aPos, 1.0f)。 |
|
| 变换顺序 | 组合变换需要遵循正确的矩阵乘法顺序,通常是 T×R×ST \times R \times ST×R×S (如果顶点是从右向左乘)。 | OpenGL 中同样需要遵循矩阵乘法顺序,例如:projection * view * model。GLM 自动将连续的操作相乘,但开发者仍需注意函数调用的顺序。 |
|
| 渲染位置输出 | 顶点函数将最终结果输出到 VertexOut 结构体中的 [[position]] 属性。 |
顶点着色器将结果赋值给内置变量 gl_Position。 |
|
| NDC 空间 | Metal NDC 的 ZZZ 轴范围是 000 到 111。 | OpenGL NDC 的 X,Y,ZX, Y, ZX,Y,Z 轴范围都是 −1.0-1.0−1.0 到 1.01.01.0。 |