C# 基于halcon的视觉工作流-章38-单位转换
本章目标:
一、提取圆心点像素坐标;
二、image_points_to_world_plane将像素坐标转为世界坐标;
三、计算两点距离;
四、匹配批量计算;
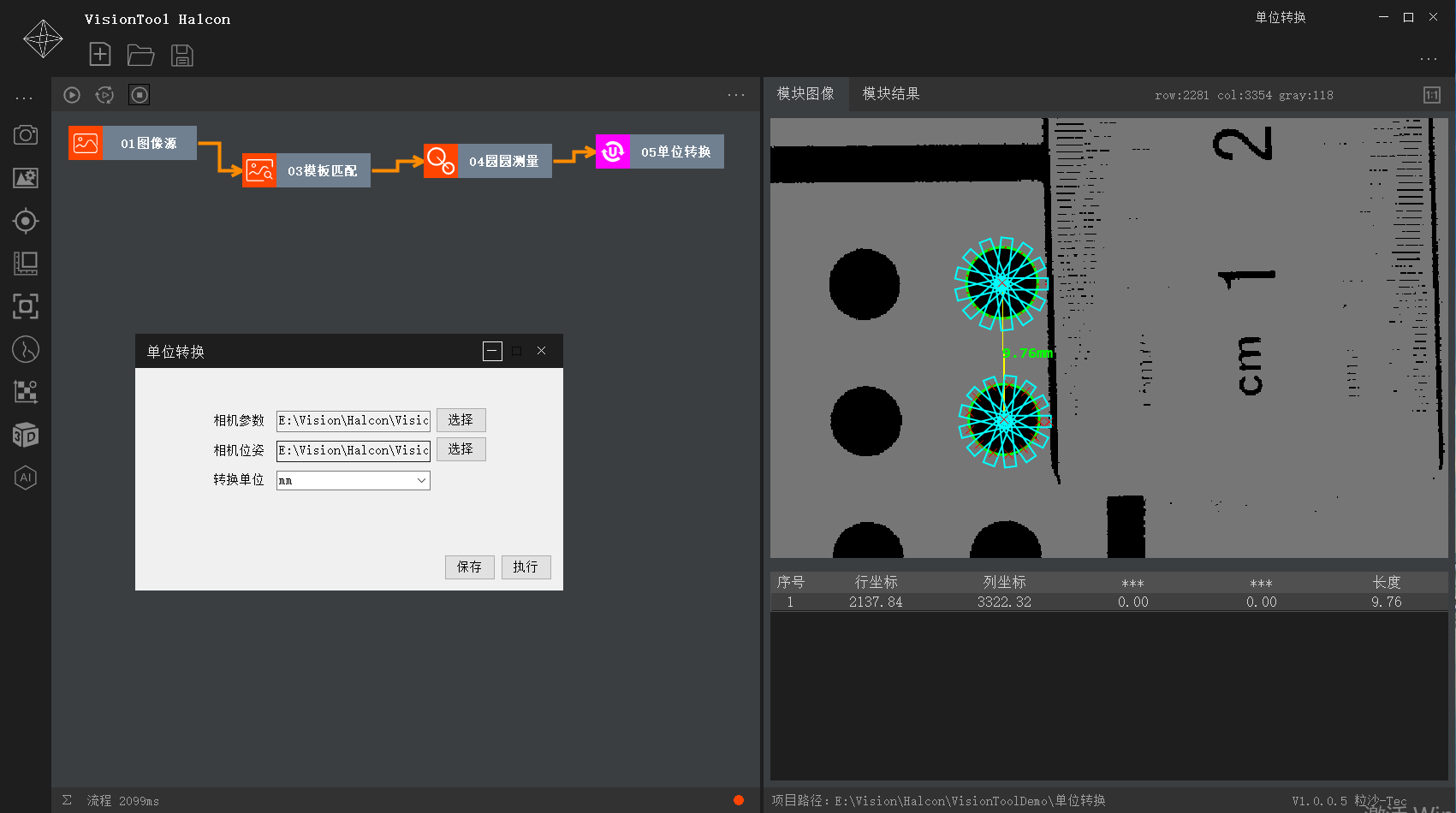
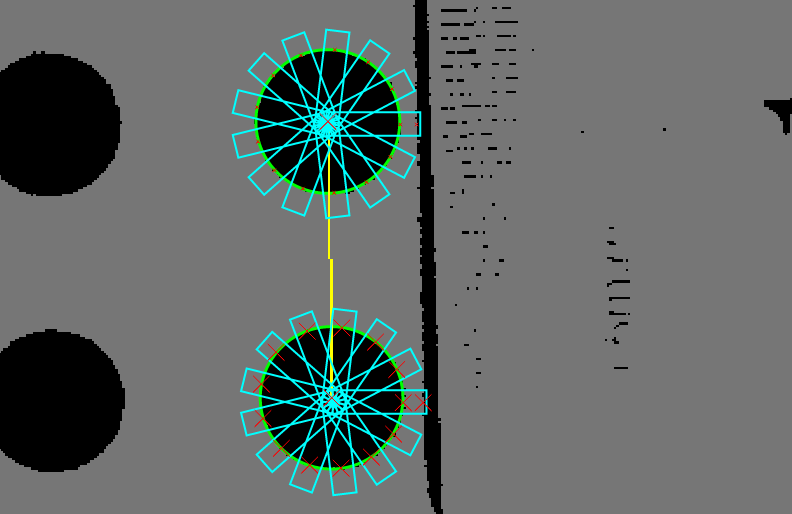
一、提取圆心点像素坐标
提取圆心点像素坐标在章23、章30已有描述,本文不再重复,效果如下图
二、image_points_to_world_plane将像素坐标转为世界坐标
算子需要输入相机内参及外参,才能将图像坐标转为世界坐标,关于相机内外参,涉及相机标定,后续章节会作出介绍
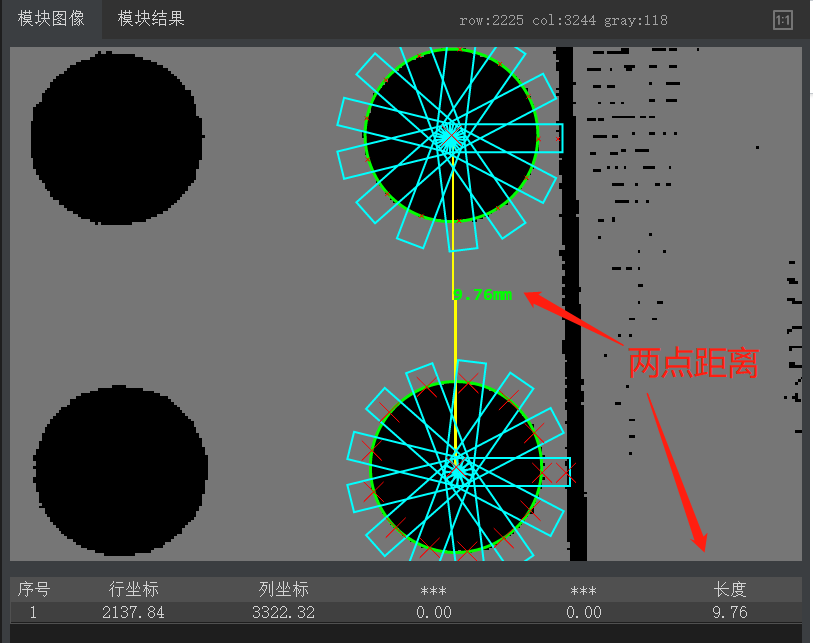
三、计算两点距离
将两点世界坐标进行距离计算,得出物理尺寸距离
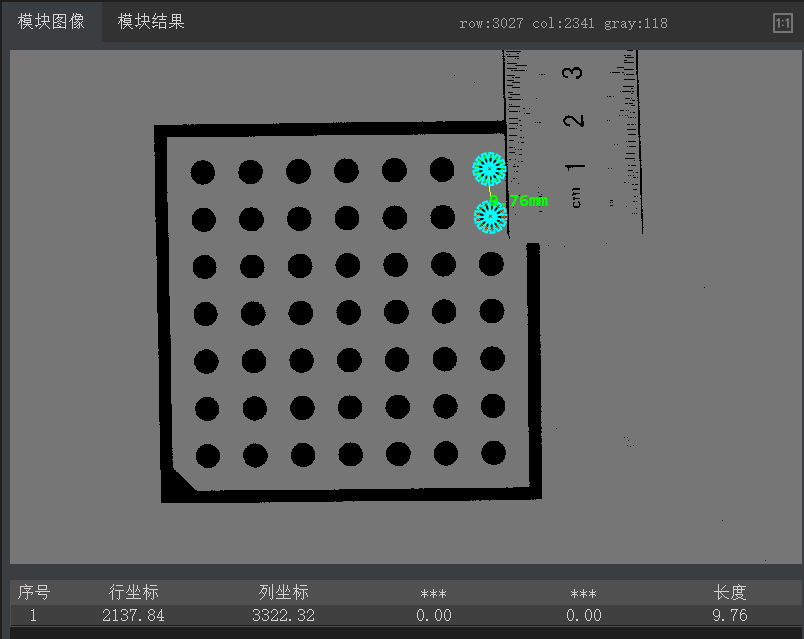
四、匹配批量计算
利用模板匹配,以匹配点找到ROI的检测区域,再进行计算
效果如下图,不论方向、角度如何,都能自动计算出相应尺寸
上述内容需要一定的技术功底,本章至此已结束,欢迎阅读下章,谢谢!