紫外UV相机在机器视觉检测方向的应用
- [🎯紫外 UV 相机5 大核心应用场景](#🎯紫外 UV 相机5 大核心应用场景)
-
- [🎯一、先明确:紫外 UV 相机,凭啥能解决 "可见光检测不了的问题"?](#🎯一、先明确:紫外 UV 相机,凭啥能解决 “可见光检测不了的问题”?)
- [🎯二、5 大核心应用场景:紫外 UV 相机在机器视觉检测中的具体落地](#🎯二、5 大核心应用场景:紫外 UV 相机在机器视觉检测中的具体落地)
-
- [💥1. 金属 / 复合材料隐性裂纹检测:提前发现 "疲劳隐患"](#💥1. 金属 / 复合材料隐性裂纹检测:提前发现 “疲劳隐患”)
- [💥2. 透明 / 半透明材质缺陷检测:告别 "反光干扰",看清内部问题](#💥2. 透明 / 半透明材质缺陷检测:告别 “反光干扰”,看清内部问题)
- [💥3. 电子元件焊接 / 封装质量检测:发现 "隐性虚焊"](#💥3. 电子元件焊接 / 封装质量检测:发现 “隐性虚焊”)
- [💥4. 食品 / 药品包装密封性检测:杜绝 "隐性漏封"](#💥4. 食品 / 药品包装密封性检测:杜绝 “隐性漏封”)
- [💥5. 工业产品 UV 隐形标记识别:实现 "全链路追溯"](#💥5. 工业产品 UV 隐形标记识别:实现 “全链路追溯”)
- [🎯三、UV 相机选型与落地避坑:3 个关键注意事项](#🎯三、UV 相机选型与落地避坑:3 个关键注意事项)
- [🎯总结:UV 相机不是 "替代普通相机",而是 "补全检测能力"](#🎯总结:UV 相机不是 “替代普通相机”,而是 “补全检测能力”)
🎯紫外 UV 相机5 大核心应用场景
在机器视觉检测中,普通可见光相机常 "束手无策":看不见零件表面的隐性裂纹、辨不出透明材质的细微划伤、找不到产品的隐形标记。而紫外 UV 相机,凭借对紫外光的特殊敏感性,能捕捉到 "人眼和普通相机看不到的信息",成为工业检测中的 "隐形缺陷猎手"。今天拆解紫外 UV 相机在机器视觉检测中的 5 大核心应用场景,帮你看清 "哪些检测难题,只有 UV 相机能解决"。
🎯一、先明确:紫外 UV 相机,凭啥能解决 "可见光检测不了的问题"?
紫外 UV 相机与普通可见光相机的核心区别,在于 "感光范围"------ 普通相机只能捕捉 400-760nm 的可见光,而 UV 相机能捕捉 200-400nm 的紫外光(分为 UVC、UVB、UVA 波段),这让它具备 3 个独特优势:
-
显形 "隐性缺陷":部分工业缺陷(如金属疲劳裂纹、塑料内部应力痕)在紫外光下会产生 "荧光反应" 或 "对比度差异",普通相机看不到,UV 相机能清晰捕捉;
-
穿透 "透明 / 半透明材质":紫外光对玻璃、塑料等透明材质的穿透性优于可见光,能检测透明件内部的杂质、气泡,或表面的细微划伤(普通相机易被透明材质的反光干扰);
-
识别 "隐形标记":工业产品常印 UV 隐形标记(如防伪码、追溯码),普通相机无法识别,UV 相机能精准捕捉,实现产品追溯。
简单说:普通相机解决 "看得见的缺陷",UV 相机解决 "看不见的隐性问题"。
🎯二、5 大核心应用场景:紫外 UV 相机在机器视觉检测中的具体落地
💥1. 金属 / 复合材料隐性裂纹检测:提前发现 "疲劳隐患"
场景痛点:航空航天零部件(如发动机叶片)、高压管道、风电法兰等金属 / 复合材料,在长期使用或加工中会产生 "隐性疲劳裂纹"(宽度<0.1mm),这些裂纹在可见光下几乎不可见,普通相机无法检测,一旦裂纹扩展会导致设备断裂,引发安全事故。
UV 相机解决方案:采用 "UV 激发 + 荧光渗透检测" 流程 ------ 先在零件表面涂覆 "紫外荧光渗透剂",渗透剂会渗入隐性裂纹;清洗表面多余渗透剂后,用 UVB/UVC 波段的 UV 相机照射,裂纹内的渗透剂会发出荧光,UV 相机能清晰捕捉到裂纹的形态和长度。
落地效果:
-
某航空发动机厂检测涡轮叶片:UV 相机能识别宽度 0.05mm 的隐性裂纹,检测准确率达 99.8%,比传统 "磁粉检测" 效率提升 3 倍(传统 1 件 / 20 分钟,UV 相机 1 件 / 5 分钟),避免因裂纹未发现导致的发动机故障;
-
某风电企业检测法兰:UV 相机搭配自动化检测平台,实现法兰全表面裂纹扫描,漏判率<0.01%,年减少因法兰断裂导致的停机损失超 500 万元。
适配产品:航空航天金属零件、高压管道、风电法兰、汽车曲轴。
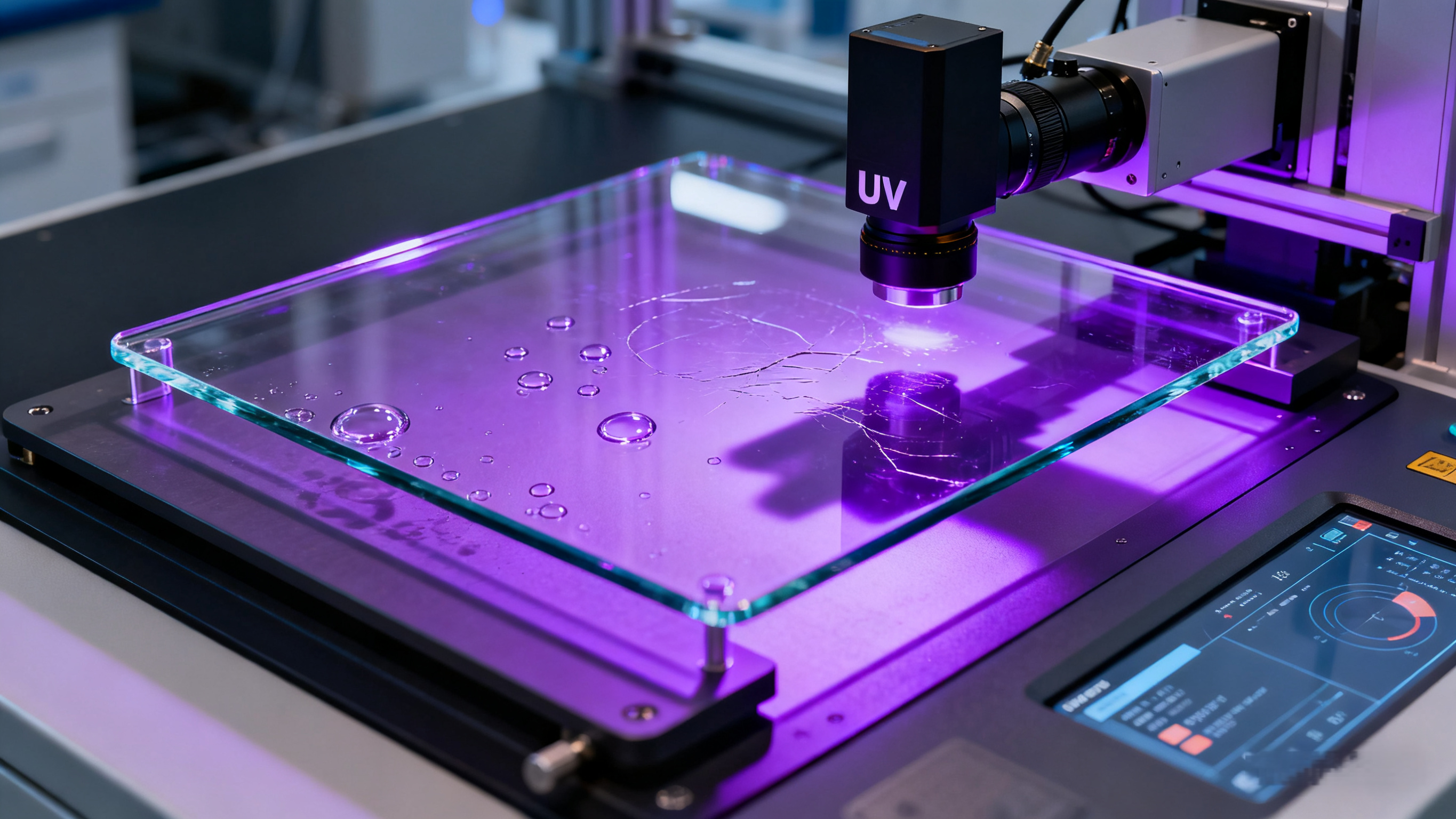
💥2. 透明 / 半透明材质缺陷检测:告别 "反光干扰",看清内部问题
场景痛点:玻璃盖板(如手机屏幕)、塑料薄膜、亚克力板材、光学镜片等透明 / 半透明材质,表面的细微划伤(深度<1μm)、内部的气泡 / 杂质(直径<0.1mm),在可见光下易被材质反光掩盖,普通相机要么漏判,要么误将反光当成缺陷。
UV 相机解决方案:选用 UVA 波段的 UV 相机,搭配 "紫外背光光源"------ 紫外光穿透透明材质时,内部气泡 / 杂质会对紫外光产生 "散射",表面划伤会产生 "反射差异",UV 相机能捕捉到这些差异,生成高对比度图像,轻松区分缺陷与反光。
落地效果:
-
某手机屏幕厂检测玻璃盖板:UV 相机能识别深度 0.5μm 的表面划伤、直径 0.08mm 的内部气泡,误判率从普通相机的 8% 降到 0.5%,检测速度达 60 片 / 分钟(普通相机 30 片 / 分钟);
-
某光学镜片厂检测镜头镜片:UV 相机避免了可见光下的反光干扰,内部杂质检测准确率提升到 99.5%,减少因镜片杂质导致的镜头成像模糊问题。
适配产品:手机玻璃盖板、光学镜片、塑料薄膜、亚克力板材、光伏玻璃。
💥3. 电子元件焊接 / 封装质量检测:发现 "隐性虚焊"
场景痛点:PCB 板焊接点(如芯片引脚、电阻焊点)、半导体封装胶体,常存在 "隐性虚焊"(焊锡未完全融合)、"封装气泡"(胶体内部气泡)等问题 ------ 虚焊在可见光下表现为 "焊点外观正常",但实际接触不良,会导致电子设备死机;封装气泡会影响半导体散热,缩短使用寿命,普通相机无法识别这些隐性问题。
UV 相机解决方案:针对焊接点,用 UV 相机搭配 "紫外环形光源",虚焊点的焊锡结晶结构与正常焊点不同,在紫外光下会呈现 "灰度差异",UV 相机能捕捉到这种差异;针对封装胶体,用 UV 相机穿透胶体,内部气泡会产生紫外光散射,形成暗点,清晰可辨。
落地效果:
-
某 PCB 厂检测芯片引脚焊接:UV 相机能识别 "隐性虚焊",准确率达 99.2%,比传统 "X 光检测" 成本降低 60%(X 光设备百万级,UV 相机十万级),检测速度达 120 片 / 小时;
-
某半导体厂检测封装胶体:UV 相机识别内部直径 0.05mm 的气泡,漏判率<0.1%,避免因封装气泡导致的芯片散热问题,产品合格率提升 2%。
适配产品:PCB 焊接点、半导体封装胶体、LED 灯珠封装、电池极耳焊接。
💥4. 食品 / 药品包装密封性检测:杜绝 "隐性漏封"
场景痛点:食品罐头、药品铝塑泡罩、输液袋等包装,需严格密封(防止氧化、污染),但常存在 "隐性漏封"(如罐头密封胶条局部未贴合、泡罩边缘微小缝隙)------ 这些漏封在可见光下难以察觉,普通相机无法检测,会导致食品变质、药品失效,引发安全事故。
UV 相机解决方案:采用 "UV 荧光示踪法"------ 在包装内注入 "紫外荧光剂",密封后挤压包装,若存在漏封,荧光剂会从缝隙渗出;用 UVA 波段的 UV 相机照射包装外部,渗出的荧光剂会发出荧光,UV 相机能精准定位漏封位置。
落地效果:
-
某食品厂检测罐头密封:UV 相机能识别宽度 0.02mm 的隐性漏封,检测准确率达 99.9%,比传统 "压力检测" 效率提升 5 倍(传统 1 罐 / 10 秒,UV 相机 1 罐 / 2 秒),避免因漏封导致的食品变质召回;
-
某药厂检测铝塑泡罩:UV 相机实现泡罩全自动化密封检测,漏判率<0.05%,符合药品 GMP 合规要求,年减少因包装漏封导致的药品报废损失超 100 万元。
适配产品:食品罐头、药品铝塑泡罩、输液袋、化妆品软管。
💥5. 工业产品 UV 隐形标记识别:实现 "全链路追溯"
场景痛点:汽车零部件、电子元件、奢侈品等产品,为防止假冒、实现追溯,会在表面印制 "UV 隐形标记"(如追溯码、防伪码)------ 这些标记在可见光下不可见,普通相机无法识别,导致产品追溯断链、假冒产品流入市场。
UV 相机解决方案:用 UVA 波段的 UV 相机搭配 "紫外点光源",照射产品表面,UV 隐形标记会吸收紫外光并发出可见光(或荧光),UV 相机能清晰捕捉标记图案,再通过 OCR / 条码识别算法,读取标记信息,实现产品追溯。
落地效果:
-
某汽车零部件厂追溯发动机零件:UV 相机识别零件表面的 UV 隐形追溯码,准确率达 99.5%,追溯速度达 30 件 / 分钟,实现 "从生产到售后" 的全链路追溯,杜绝假冒零件混入;
-
某电子厂追溯芯片:UV 相机识别芯片的 UV 隐形防伪码,避免假冒芯片流入生产线,年减少因芯片问题导致的设备故障损失超 200 万元。
适配产品:汽车零部件、电子芯片、奢侈品、医疗器械。
🎯三、UV 相机选型与落地避坑:3 个关键注意事项
-
选对 "紫外波段":不同场景适配不同波段
不是所有 UV 相机都通用,需按场景选波段:
-
隐性裂纹检测(荧光渗透):选 UVB/UVC 波段(200-320nm,激发荧光效果强);
-
透明材质检测、隐形标记识别:选 UVA 波段(320-400nm,穿透性好、对材质损伤小);
选错波段会导致检测失效(如用 UVA 检测荧光渗透裂纹,荧光亮度不足,无法识别)。
-
搭配 "专用紫外光源":避免 "光源不匹配"
UV 相机需搭配 "紫外专用光源"(如 UVLED 光源),不能用普通可见光光源 ------ 普通光源紫外光强度不足,会导致缺陷对比度低;且需根据检测场景选光源类型(如透明材质用背光、焊接点用环形光),光源与相机不匹配会大幅降低检测精度。
-
控制 "环境紫外干扰":避免 "误判 / 漏判"
工业车间若有阳光直射(阳光含紫外光)、紫外消毒灯等,会产生环境紫外干扰,导致 UV 相机误判(将环境紫外光当成缺陷荧光)------ 落地时需加 "紫外遮光罩",或在暗箱内检测,隔绝环境干扰。
🎯总结:UV 相机不是 "替代普通相机",而是 "补全检测能力"
在机器视觉检测中,紫外 UV 相机不是 "取代普通可见光相机",而是填补 "隐性缺陷、透明材质、隐形标记" 等检测空白,让工业检测从 "只能看表面" 升级为 "能看内部、看隐性"。无论是航空航天的安全检测,还是食品药品的合规检测,UV 相机都成为 "不可替代的检测工具"。