4 图
4.1 图的定义与存储
4.1.1 图的定义
-
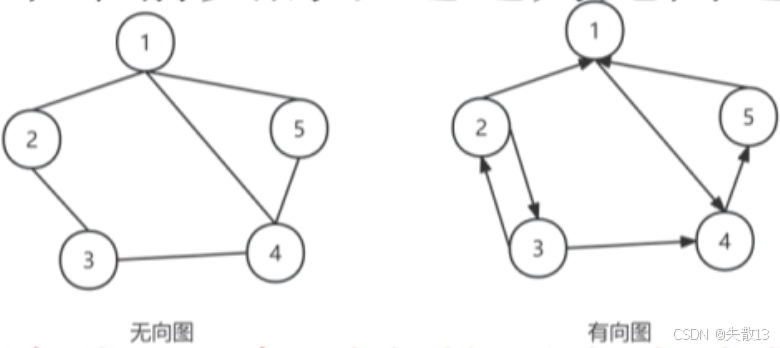
图是一种非线性结构,图中任意两个顶点之间都可能有直接关系,相关定义如下;
-
有向边和无向边:带箭头的单通道为有向边,不带箭头的双通道为无向边;
-
无向图:图中任意顶点之间均为无向边;
-
有向图:图中任意顶点之间均为有向边;
-
完全图:
- 无向完全图中,两两顶点之间均有连线,nnn 个顶点的无向完全图有 n(n−1)/2n(n - 1)/2n(n−1)/2 条边;
- 有向完全图中,两两顶点之间均有连线,nnn 个顶点的有向完全图有 n(n−1)n(n - 1)n(n−1) 条边;
-
度、出度和入度:进出某个顶点的边的数目;
- 其中进入该顶点的边数称为入度 ,从该顶点出去的边数称为出度;
- 在无向图中,不分入度和出度,有多少条连线就是多少度数;
- 在有向图中,顶点的度为出度和入度之和;
-
路径:存在一条通路,可以从一个顶点到达另一个顶点,有向图的路径也是有方向的;
-
连通图和连通分量 :针对无向图;
- 若从顶点 vvv 到顶点 u 之间是有路径的,则说明 vvv 和 uuu 之间是连通的;
- 若无向图中任意两个顶点之间都是连通的 ,则称为连通图;
- 无向图 GGG 的极大连通子图称为其连通分量;
-
强连通图和强连通分量 :针对有向图;
- 若有向图中任意两个顶点之间都相互存在路径 ,即存在顶点 vvv 到顶点 uuu,也存在顶点 uuu 到顶点 vvv 的路径,则称为强连通图;
- 有向图中的极大连通子图称为其强连通分量;
-
生成树 :一个连通图 的生成树就是该图的连通性不变(即任意两个顶点之间都存在路径),但没有环路的子图 。一个有 nnn 个顶点的生成树有且仅有 n−1n - 1n−1 条边;
-
网:边带权值的图称为网。
4.1.2 图的存储结构
-
邻接矩阵
-
nnn 个顶点的图可以用 n×nn \times nn×n 的邻接矩阵来表示;
-
若顶点 iii 到顶点 jjj 存在边,则矩阵元素 Ai,jAi,jAi,j 的值为 111,否则为 000。通过邻接矩阵可以清晰地反映出图中顶点之间的连接关系;
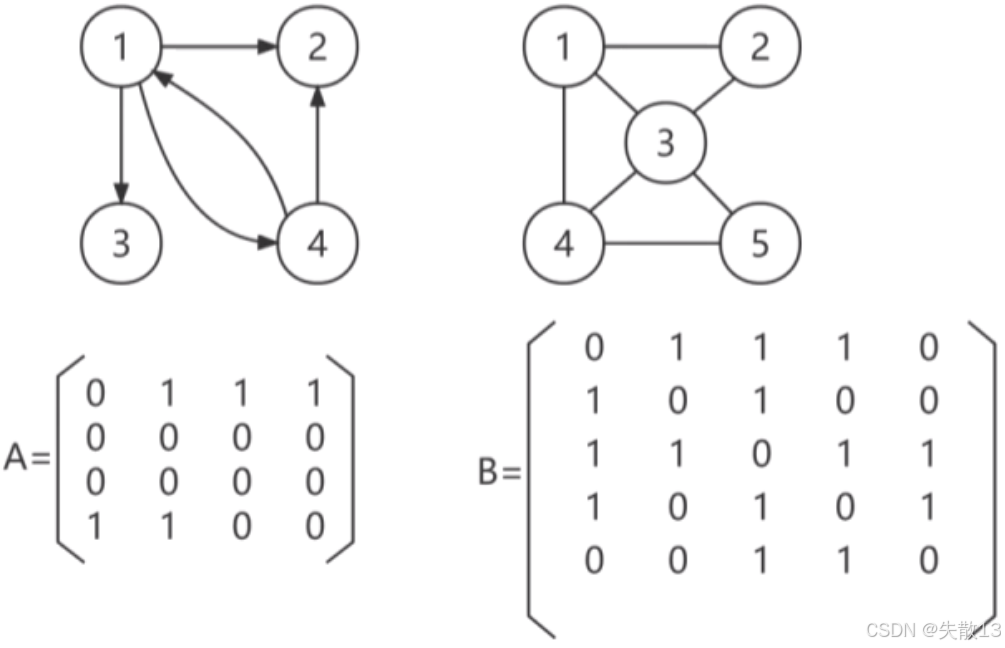
左图的邻接矩阵 AAA:
- 顶点数 n=4n = 4n=4,矩阵是 4×44 \times 44×4;
- 第一行(顶点 111 作为起点):
- A1,2=1A1,2 = 1A1,2=1:顶点 111 到顶点 222 有向边;
- A1,3=1A1,3 = 1A1,3=1:顶点 111 到顶点 333 有向边;
- A1,4=1A1,4 = 1A1,4=1:顶点 111 到顶点 444 有向边;
- 第二行(顶点 222 作为起点):所有元素为 000,说明顶点 222 到其他顶点无有向边;
- 第三行(顶点 333 作为起点):所有元素为 000,说明顶点 333 到其他顶点无有向边;
- 第四行(顶点 444 作为起点):
- A4,1=1A4,1 = 1A4,1=1:顶点 444 到顶点 111 有向边;
- A4,2=1A4,2 = 1A4,2=1:顶点 444 到顶点 222 有向边;
右图的邻接矩阵 BBB:
- 顶点数 n=5n = 5n=5,矩阵是 5\\times 5;
- 观察对称性(以主对角线为轴):
- B1,2=B2,1=1B1,2 = B2,1 = 1B1,2=B2,1=1:顶点 111 和 222 之间有无向边;
- B1,3=B3,1=1B1,3 = B3,1 = 1B1,3=B3,1=1:顶点 111 和 333 之间有无向边;
- B1,4=B4,1=1B1,4 = B4,1 = 1B1,4=B4,1=1:顶点 111 和 444 之间有无向边;
- B2,3=B3,2=1B2,3 = B3,2 = 1B2,3=B3,2=1:顶点 222 和 333 之间有无向边;
- B3,4=B4,3=1B3,4 = B4,3 = 1B3,4=B4,3=1:顶点 333 和 444 之间有无向边;
- B3,5=B5,3=1B3,5 = B5,3 = 1B3,5=B5,3=1:顶点 333 和 555 之间有无向边;
- B4,5=B5,4=1B4,5 = B5,4 = 1B4,5=B5,4=1:顶点 444 和 555 之间有无向边;
邻接矩阵通过二维数组直接表示顶点间的连接关系:
- 有向图的邻接矩阵不一定对称(因为边是单向的);
- 无向图的邻接矩阵关于主对角线对称(因为边是双向的);
-
-
邻接表
-
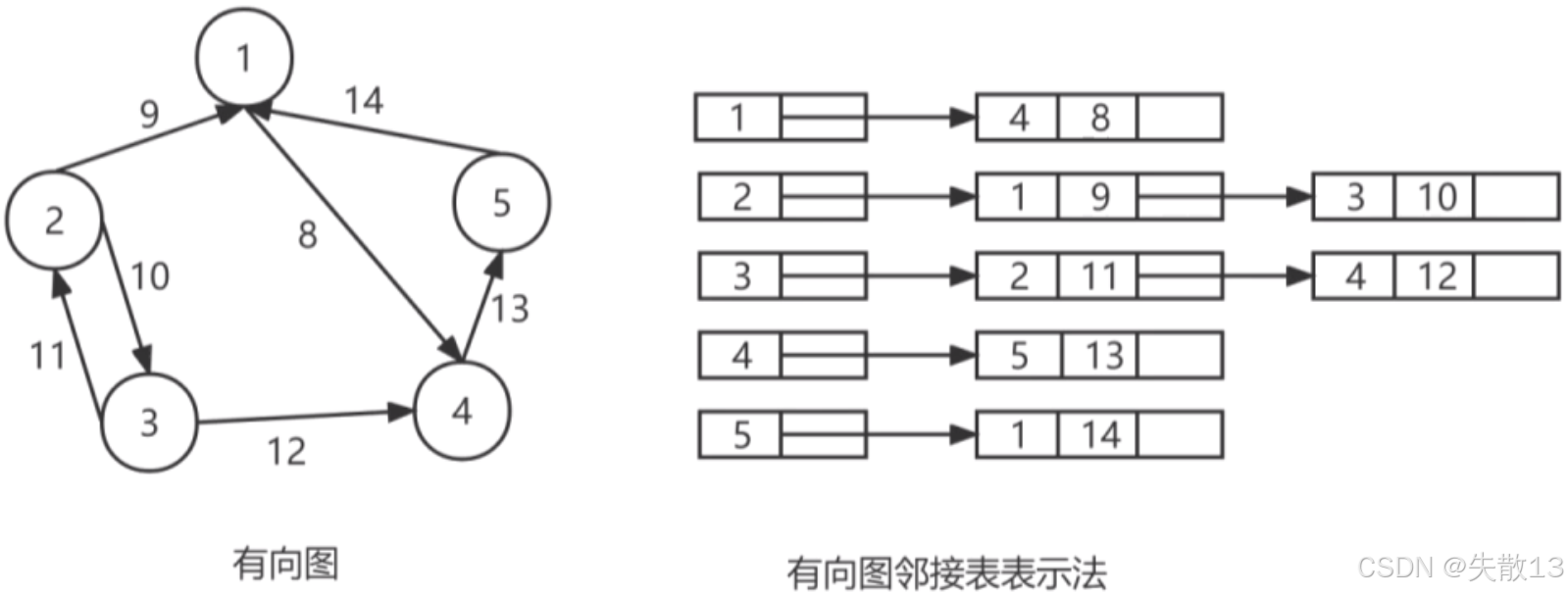
邻接表是链式存储结构;
-
用一个一维数组存储所有的顶点,对于数组中的每个顶点都生成一个链表;
-
链表中每个顶点(表节点)包括顶点号、顶点信息(如边的权值)、以及指向下一个顶点的指针。这种存储方式能够灵活地表示图的结构,尤其适合顶点数多但边数少的稀疏图;
-
4.1.3 练习
-
若无向图G有n个顶点e条边,则G采用邻接矩阵存储时,矩阵的大小为()。
- A.n∗en*en∗e
- B.n2n^2n2
- C.n2+e2n^2 + e^2n2+e2
- D.(n+e)2(n + e)^2(n+e)2
B
n个顶点的图可以用n∗nn*nn∗n的邻接矩阵来表示;
-
某图G的邻接表中共有奇数个表示边的表节点,则图G()。
- A.有奇数个顶点
- B.有偶数个顶点
- C.是无向图
- D.是有向图
D
在邻接表中,奇数个表示边的表节点说明在图中有奇数条边,无法说明顶点个数是奇数还是偶数,所以A、B选项都是错误的
由于无向图的边一定是对称存在的,所以表节点的个数一定是偶数,不满足题意,C选项也是错误的。只有D选项符合要求。
4.2 图的遍历
- 图的遍历是从图中的任意一个顶点出发,对图中的所有顶点访问一次且只访问一次。图的遍历分为深度优先搜索 和广度优先搜索两种方式。
4.2.1 深度优先搜索(DFS)
-
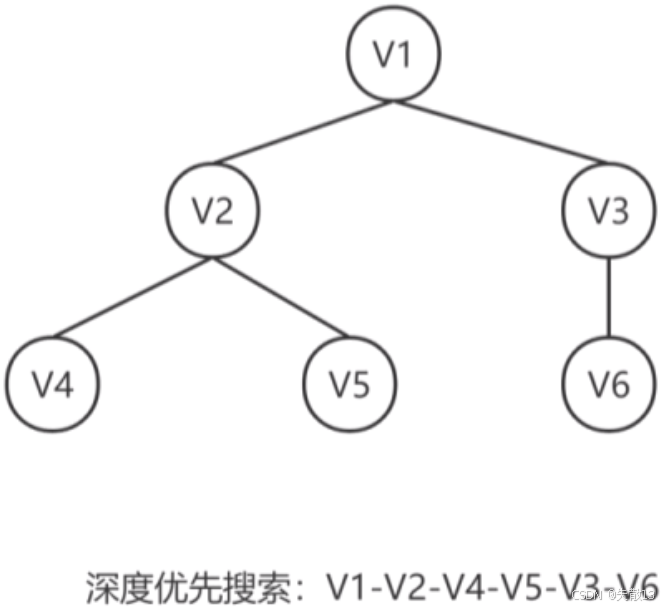
特点:类似于树的先根遍历(先访问根节点,再递归访问子树);
-
步骤:
- 访问一个顶点 VVV;
- 依次搜索顶点 VVV 的所有邻接顶点;
- 若邻接顶点未被访问,则对该邻接顶点进行深度优先搜索;若已被访问,则跳到顶点 VVV 的下一个邻接顶点,重复上述过程,直到所有顶点都被访问;
-
例:
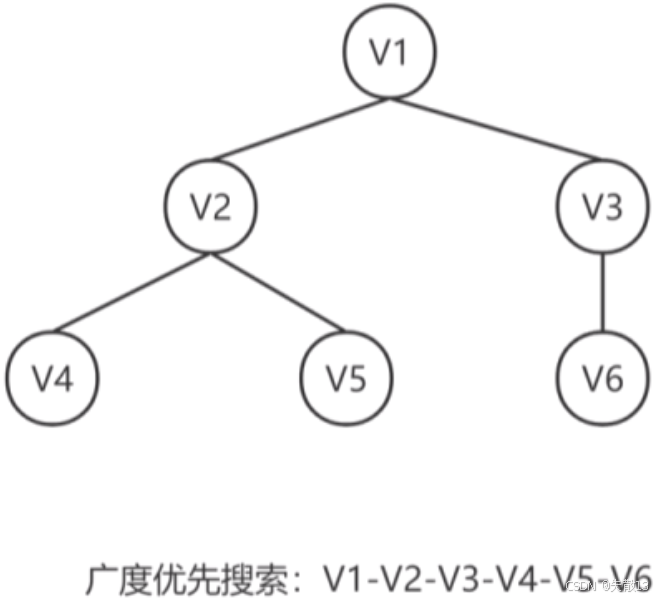
4.2.2 广度优先搜索(BFS)
-
特点:类似于树的层次遍历(按层依次访问节点),体现为"深度越小越优先被访问";
-
步骤:
- 访问一个顶点 VVV;
- 依次访问顶点 VVV 的所有未被访问的邻接点;
- 分别访问这些邻接点的未被访问的所有邻接点,重复此过程,直到所有顶点都被访问。
-
例:
4.2.3 时间复杂度
- 使用邻接矩阵 存储图时,两种优先搜索的时间复杂度均为 O(n2)O(n^2)O(n2)( n 为顶点个数,因为邻接矩阵需遍历每个顶点及对应的行/列判断邻接关系);
- 使用邻接表 存储图时,两种优先搜索的时间复杂度均为 O(n+e)O(n + e)O(n+e)(nnn 为顶点个数,eee 为边的个数,邻接表只需遍历每个顶点的邻接节点,总邻接节点数与边数相关)。
4.3 生成树和最小生成树
4.3.1 介绍
-
生成树 :一个连通图 的生成树是该图的连通性不变,但没有环路的子图 。一个有 n 个顶点的生成树有且仅有 n−1n - 1n−1 条边;
-
最小生成树:
-
包含连通图的所有顶点;
-
有且仅有 n−1n - 1n−1 条边;
以上两点就构成了一棵生成树;
-
这些边的权值总和最小;
-
注意:最小生成树是一棵树,不是图,且没有环路;
-
-
求连通带权无向图最小生成树的算法:
- 普里姆算法(Prim)
- 克鲁斯卡尔算法(Kruskal)
4.3.2 普里姆算法(Prim)
-
选择一条权值最小的边,并选中该边的顶点,从已选顶点中连接权值最小的边,直至连接所有顶点,且过程中不能出现环路;
-
时间复杂度:O(n2)O(n^2)O(n2)( n 为顶点个数);
-
适用场景:只与顶点相关,适用于求稠密图(边数较多的图)的最小生成树;
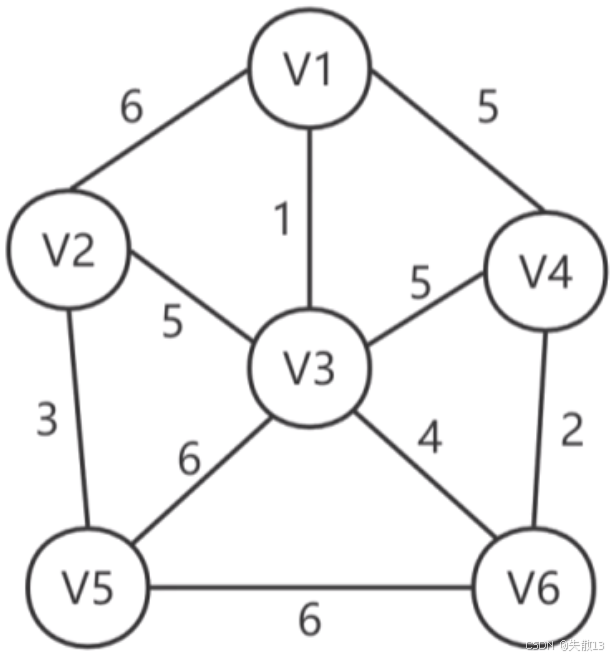
步骤1:初始化
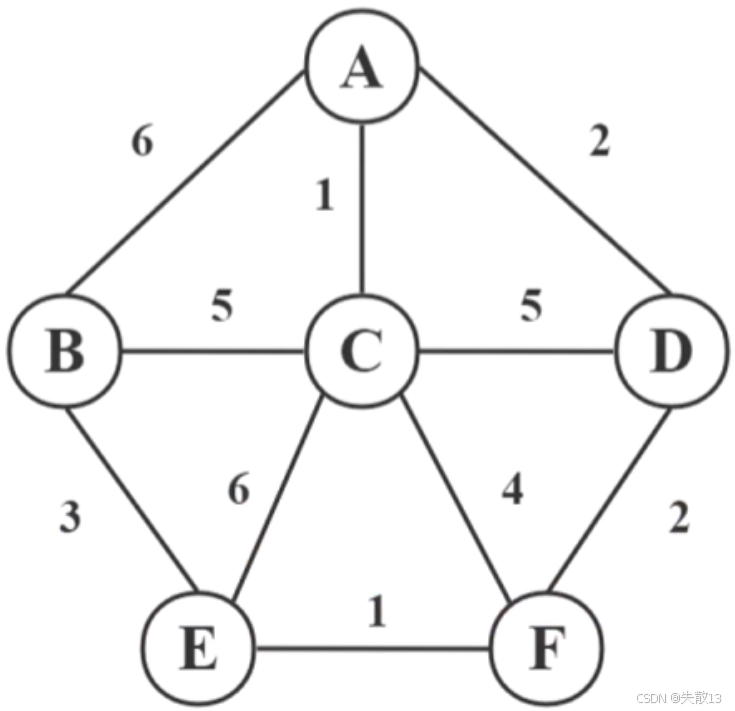
- 设:已选顶点集合 U ,未选顶点集合 V = {V_1, V_2, V_3, V_4, V_5, V_6} ;
- 从 VVV 中找出任意两个顶点之间存在的一条权值最小的边,其中权值最小的边是 V1−V3V_1 - V_3V1−V3(权值 111);
- 将 V1,V3V_1,V_3V1,V3 加入已选顶点集合 U={V1,V3}U = \{V_1, V_3\}U={V1,V3},从 VVV 中移除 V3V_3V3,V={V2,V4,V5,V6}V = \{V_2, V_4, V_5, V_6\}V={V2,V4,V5,V6},记录边 (V_1, V_3) 到最小生成树;
步骤2:第二次选边
- 找出从 U={V1,V3}U = \{V_1, V_3\}U={V1,V3} 到 V={V2,V4,V5,V6}V = \{V_2, V_4, V_5, V_6\}V={V2,V4,V5,V6} 的所有边。这些边有 V1−V2V_1 - V_2V1−V2(权值 666)、V1−V4V_1 - V_4V1−V4(权值 555)、V3−V2V_3 - V_2V3−V2(权值 555)、V3−V4V_3 - V_4V3−V4(权值 555)、V3−V5V_3 - V_5V3−V5(权值 666)、V3−V6V_3 - V_6V3−V6(权值 444)。其中权值最小的边是 V3−V6V_3 - V_6V3−V6(权值 444);
- 将 V6V_6V6 加入已选顶点集合 U={V1,V3,V6}U = \{V_1, V_3, V_6\}U={V1,V3,V6},从 VVV 中移除 V6V_6V6,V={V2,V4,V5}V = \{V_2, V_4, V_5\}V={V2,V4,V5},记录边 (V3,V6)(V_3, V_6)(V3,V6) 到最小生成树;
步骤3:第三次选边
- 找出从 U={V1,V3,V6}U = \{V_1, V_3, V_6\}U={V1,V3,V6} 到 V={V2,V4,V5}V = \{V_2, V_4, V_5\}V={V2,V4,V5} 的所有边。这些边有 V1−V2V_1 - V_2V1−V2(权值 666)、V1−V4V_1 - V_4V1−V4(权值 555)、V3−V2V_3 - V_2V3−V2(权值 555)、V3−V4V_3 - V_4V3−V4(权值 555)、V6−V4V_6 - V_4V6−V4(权值 222)、V6−V5V_6 - V_5V6−V5(权值 666)。其中权值最小的边是 V6−V4V_6 - V_4V6−V4(权值 222);
- 将 V4V_4V4 加入已选顶点集合 U={V1,V3,V6,V4}U = \{V_1, V_3, V_6, V_4\}U={V1,V3,V6,V4},从 VVV 中移除 V4V_4V4,V={V2,V5}V = \{V_2, V_5\}V={V2,V5},记录边 (V6,V4)(V_6, V_4)(V6,V4) 到最小生成树;
步骤4:第四次选边
- 找出从 U={V1,V3,V6,V4}U = \{V_1, V_3, V_6, V_4\}U={V1,V3,V6,V4} 到 V={V2,V5}V = \{V_2, V_5\}V={V2,V5} 的所有边。这些边有 V1−V2V_1 - V_2V1−V2(权值 666)、V3−V2V_3 - V_2V3−V2(权值 555)、V2−V5V_2 - V_5V2−V5(权值 333)、V3−V5V_3 - V_5V3−V5(权值 666)、V6−V5V_6 - V_5V6−V5(权值 666)。其中权值最小的边是 V2−V5V_2 - V_5V2−V5(权值 333);
- 将 V5V_5V5 加入已选顶点集合 U={V1,V3,V6,V4,V5}U = \{V_1, V_3, V_6, V_4, V_5\}U={V1,V3,V6,V4,V5},从 VVV 中移除 V5V_5V5,V={V2}V = \{V_2\}V={V2},记录边 (V2,V5)(V_2, V_5)(V2,V5) 到最小生成树;
步骤5:第五次选边
- 找出从 U={V1,V3,V6,V4,V5}U = \{V_1, V_3, V_6, V_4, V_5\}U={V1,V3,V6,V4,V5} 到 V={V2}V = \{V_2\}V={V2} 的所有边。这些边有 V1−V2V_1 - V_2V1−V2(权值 666)、V3−V2V_3 - V_2V3−V2(权值 555)。其中权值最小的边是 V3−V2V_3 - V_2V3−V2(权值 555);
- 将 V2V_2V2 加入已选顶点集合 U={V1,V3,V6,V4,V5,V2}U = \{V_1, V_3, V_6, V_4, V_5, V_2\}U={V1,V3,V6,V4,V5,V2},此时所有顶点都已被访问,记录边 (V3,V2)(V_3, V_2)(V3,V2) 到最小生成树;
最终,最小生成树的边为 (V_1, V_3) (权值 111)、(V3,V6)(V_3, V_6)(V3,V6)(权值 444)、(V6,V4)(V_6, V_4)(V6,V4)(权值 222)、(V2,V5)(V_2, V_5)(V2,V5)(权值 333)、(V3,V2)(V_3, V_2)(V3,V2)(权值 555),权值总和为 1+4+2+3+5=151 + 4 + 2 + 3 + 5 = 151+4+2+3+5=15;
4.3.3 克鲁斯卡尔算法(Kruskal)
-
核心思路:选择权值最小的边进行连接,直至连接所有的顶点,过程中不能出现环路(贪心思想);
-
时间复杂度:O(elog2e)O(e\log_2 e)O(elog2e)(eee 为边的个数);
-
适用场景:只与边相关,适用于求稀疏图(边数较少的图)的最小生成树;
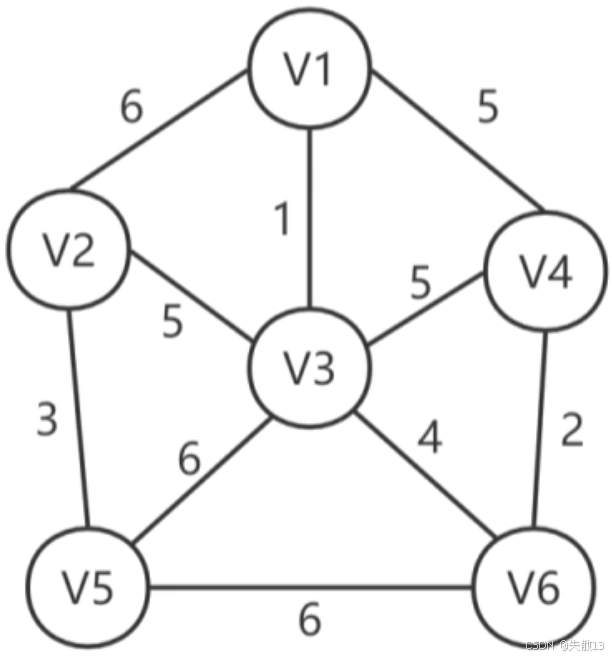
选择边 (V_1, V_3) (权值 111):此时生成树中的顶点为 V1,V3V_1, V_3V1,V3,无环路;
选择边 (V6,V4)(V_6, V_4)(V6,V4)(权值 222):生成树中的顶点为 V1,V3,V4,V6V_1, V_3, V_4, V_6V1,V3,V4,V6,无环路;
选择边 (V2,V5)(V_2, V_5)(V2,V5)(权值 333):生成树中的顶点为 V1,V3,V4,V6,V2,V5V_1, V_3, V_4, V_6, V_2, V_5V1,V3,V4,V6,V2,V5,无环路;
选择边 (V3,V6)(V_3, V_6)(V3,V6)(权值 444):生成树中的顶点为 V1,V3,V4,V6,V2,V5V_1, V_3, V_4, V_6, V_2, V_5V1,V3,V4,V6,V2,V5,无环路;
选择权值为 555 的边,可以发现有三条,但是要求选择后不能构成环路,所以只能选择边 (V2,V3)(V_2, V_3)(V2,V3);
最终,最小生成树的边为 (V_1, V_3) (权值 111)、(V6,V4)(V_6, V_4)(V6,V4)(权值 222)、(V2,V5)(V_2, V_5)(V2,V5)(权值 333)、(V3,V6)(V_3, V_6)(V3,V6)(权值 444)、(V3,V2)(V_3, V_2)(V3,V2)(权值 555),权值总和为 1+2+3+4+5=151 + 2 + 3 + 4 + 5 = 151+2+3+4+5=15。
4.4 拓扑排序和关键路径
4.4.1 AOV网和拓扑排序
-
AOV(Activity On Vertex NetWork)网定义:如果有向图的顶点表示活动 ,有向边表示活动之间的优先关系,则称这样的图为以顶点表示活动的网(AOV网);
-
拓扑排序
-
作用:对AOV网进行拓扑排序,若顶点全部输出,则可以证明AOV网不存在环路;若不能全部输出,则存在环路;
-
步骤:
-
在AOV网中选择入度为0的顶点并输出;
-
从网中删除该顶点及与该顶点有关的弧;
在有向图中,边也成为"弧";
-
重复前两步,直到网中不存在入度为0的顶点为止;
-
-
-
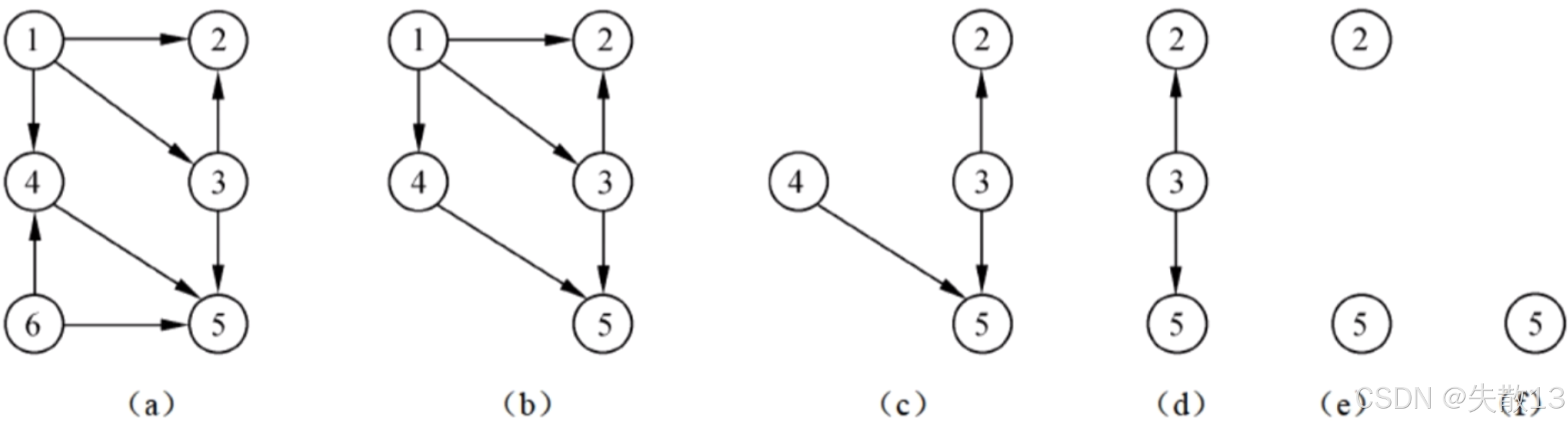
示例(结合图中拓扑排序过程图):
-
初始图(a)中,入度为0的顶点有1和6,此处选择输出顶点6,删除顶点6及相关弧,得到图(b);
也可以选择顶点1。这也体现出了拓扑排序最后输出的结果不是唯一的;
-
图(b)中入度为0的顶点是1,输出顶点1,删除顶点1及相关弧,得到图(c);
-
图(c)中入度为0的顶点是4,输出顶点4,删除顶点4及相关弧,得到图(d);
-
图(d)中入度为0的顶点是3,输出顶点3,删除顶点3及相关弧,得到图(e);
-
图(e)中入度为0的顶点是5,输出顶点5,删除顶点5及相关弧,得到图(f),所有顶点输出完毕,说明原AOV网无环路;
-
4.4.2 AOE网和关键路径
-
AOE(Activity On Edge Network)网定义:如果有向图的顶点表示事件,有向边表示活动,边的权值表示活动持续时间,则这种带权有向图称为以边表示活动的网(AOE网);
-
关键路径
-
定义:在从源点(起始事件顶点)到汇点(最终事件顶点)的路径中,长度最长的路径称为关键路径。关键路径上的所有活动均是关键活动;
-
意义:
- 如果任何一项关键活动没有按期完成,就会影响整个工程的进度;
- 缩短关键活动的工期通常可以缩短整个工程的工期;
- 关键路径上的长度就是完成整个工程项目的最短工期(因为关键路径是最长路径,工程需等最长路径上的活动都完成才能结束);
-
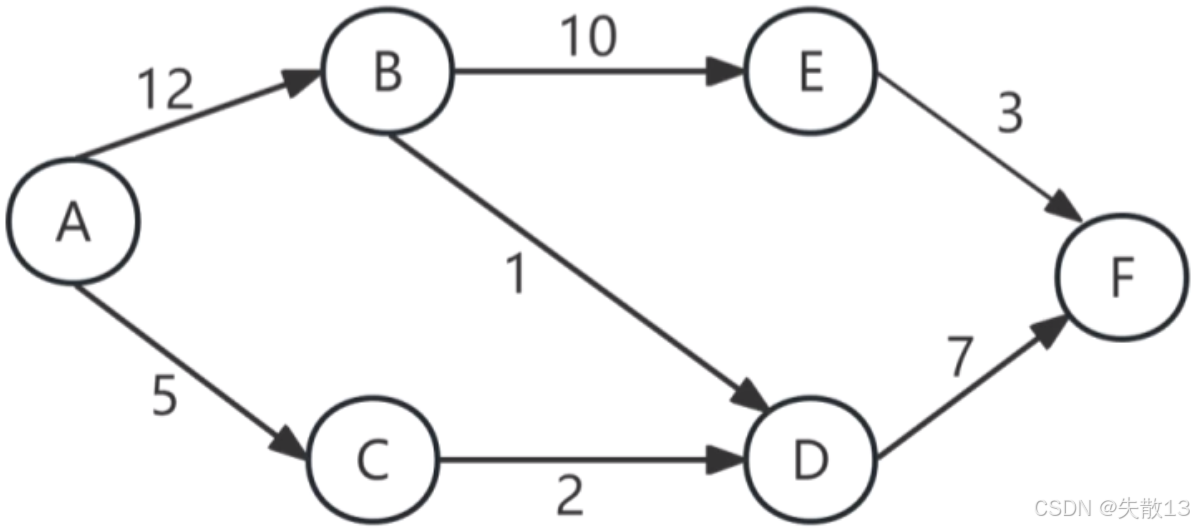
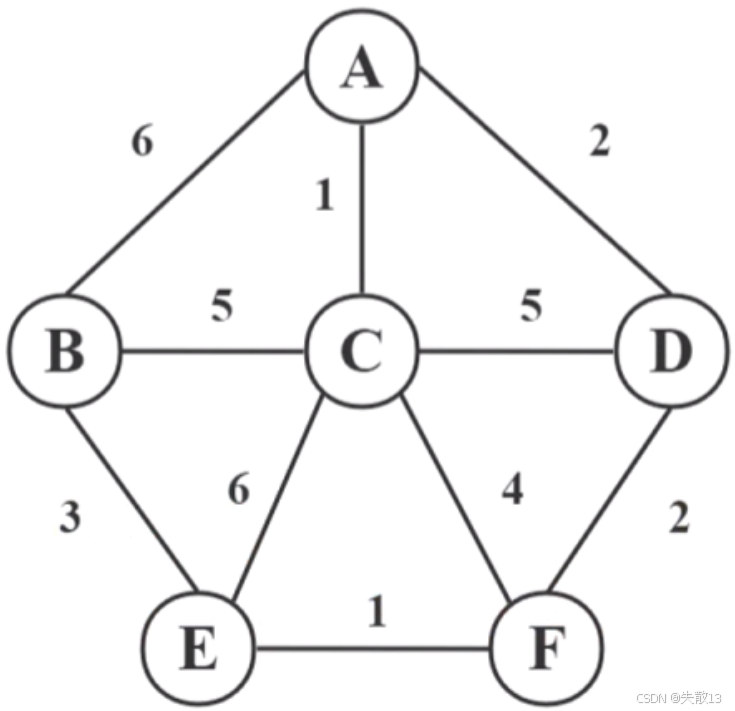
例:需要通过计算各路径的长度,找出最长的那条路径,即为关键路径;
- 路径 A→B→E→FA \to B \to E \to FA→B→E→F 的长度为 12+10+3=2512 + 10 + 3 = 2512+10+3=25;
- 路径 A→C→D→FA \to C \to D \to FA→C→D→F 的长度为 5+2+7=145 + 2 + 7 = 145+2+7=14;
- 路径 A→B→D→FA \to B \to D \to FA→B→D→F 的长度为 12+1+7=2012 + 1 + 7 = 2012+1+7=20;
- 经比较 A→B→E→FA \to B \to E \to FA→B→E→F 是长度最长的路径,即为关键路径,其长度 252525 就是该工程的最短工期;
-
4.4.3 练习
-
拓扑排序是将有向图中所有顶点排成一个线性序列的过程,并且该序列满足:若在AOV网中从顶点到有一条路径,则顶点必然在顶点之前。对于下面的有向图,()是其拓扑排序。
- A.1234576
- B.1235467
- C.2135476
- D.2134567
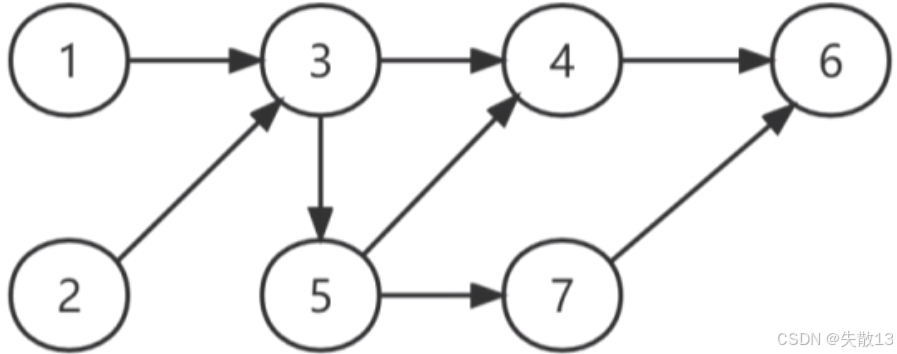
C
拓扑排序:①在AOV网中选择入度为0的顶点并输出 ②从网中删除该顶点及与该顶点有关的弧 ③重复前两步,直到网中不存在入度为0的顶点为止。
-
下图是一个软件项目的活动图,其中顶点表示项目里程碑,连接顶点的边表示包含的活动,则里程碑()在关键路径上,关键路径长度为()。
-
A.B
-
B.E
-
C.G
-
D.I
-
A.15
-
B.17
-
C.19
-
D.23
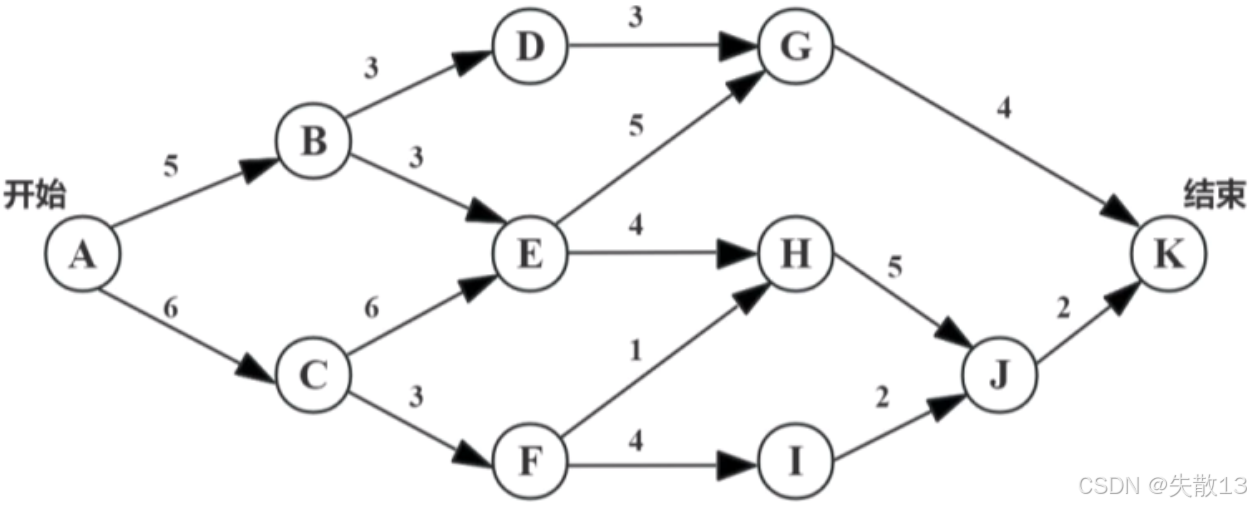
B D
关键路径:从开始顶点到结束顶点之间距离最长的一条路径。关键路径上的长度就是完成整个工程项目的最短工期。根据上述项目活动图,路径A - C - E - H - J - K是关键路径,故里程碑E在关键路径上。答案选B D。
-
4.5 最短路径
- 最短路径的定义:从源点到各顶点最短的路径为最短路径;
4.5.1 迪杰斯特拉(Dijkstra)算法
-
迪杰斯特拉(Dijkstra)算法 :使用贪心策略解决图的单源最短路径问题,这里的"单源"指的是从一个特定的源点出发,到其他所有顶点的最短路径,该算法属于贪心法范畴;
-
以下图为例:求解 A 到 F 的最短路径;
-
算法思想:从源点开始,逐步找到到各顶点的最短路径。初始时,源点到自身的距离为0,到其他顶点的距离为无穷大。然后每次选择一个未确定最短路径且距离源点最近的顶点,以该顶点为中间点,更新源点到其他未确定最短路径顶点的距离,直到所有顶点的最短路径都被确定;
-
初始化
-
源点为A,设置距离数组
dist,其中dist[A] = 0(源点到自身的距离为0),dist[B] = dist[C] = dist[D] = dist[E] = dist[F] = ∞(源点到其他顶点的距离为无穷大);distA distB distC distD distE distF 0 ∞ ∞ ∞ ∞ ∞ -
设置顶点是否已确定最短路径的标记数组
visited,初始时所有顶点的visited值为false;visitedA visitedB visitedC visitedD visitedE visitedF false false false false false false
-
-
第一次迭代
-
找到
visited为false且dist最小的顶点,即A(dist[A]=0); -
标记A为已访问(
visited[A] = true);visitedA visitedB visitedC visitedD visitedE visitedF true false false false false false -
以A为中间点 ,更新与A相邻顶点的
dist值:- A到B的直接距离是6,所以
dist[B] = min(∞, 0 + 6) = 6; - A到C的直接距离是1,所以
dist[C] = min(∞, 0 + 1) = 1; - A到D的直接距离是2,所以
dist[D] = min(∞, 0 + 2) = 2;
distA distB distC distD distE distF 0 6 1 2 ∞ ∞ - A到B的直接距离是6,所以
-
-
第二次迭代
-
找到
visited为false且dist最小的顶点,即C(dist[C]=1); -
标记C为已访问(
visited[C] = true);visitedA visitedB visitedC visitedD visitedE visitedF true false true false false false -
以C为中间点 ,更新与C相邻顶点的
dist值:- C到B的直接距离是5,当前
dist[B] = 6,1 + 5 = 6,不更新; - C到D的直接距离是5,当前
dist[D] = 2,1 + 5 = 6,不更新; - C到E的直接距离是6,当前
dist[E] = ∞,所以dist[E] = 1 + 6 = 7; - C到F的直接距离是4,当前
dist[F] = ∞,所以dist[F] = 1 + 4 = 5;
distA distB distC distD distE distF 0 6 1 2 7 5 - C到B的直接距离是5,当前
-
-
第三次迭代
-
找到
visited为false且dist最小的顶点,即D(dist[D]=2); -
标记D为已访问(
visited[D] = true);visitedA visitedB visitedC visitedD visitedE visitedF true false true true false false -
以D为中间点 ,更新与D相邻顶点的
dist值:- D到F的直接距离是2,当前
dist[F] = 5,2 + 2 = 4,所以dist[F] = min(5, 4) = 4;
distA distB distC distD distE distF 0 6 1 2 7 4 - D到F的直接距离是2,当前
-
-
第四次迭代
-
找到
visited为false且dist最小的顶点,即F(dist[F]=4);visitedA visitedB visitedC visitedD visitedE visitedF true false true true false true -
标记F为已访问(
visited[F] = true)。此时,A到F的最短路径长度已确定为4。
-
-
4.5.2 弗洛伊德(Floyd)算法
-
弗洛伊德(Floyd)算法 :使用动态规划的思想解决图的多源点之间最短路径的问题,即可以求出图中任意两个顶点之间的最短路径,该算法属于动态规划法范畴;
-
以下图为例:求解 A 到 F 的最短路径;
-
算法思想:通过动态规划,逐步考虑中间顶点,更新任意两个顶点之间的最短距离。定义一个距离矩阵
dist,其中dist[i][j]表示顶点i到顶点j的直接距离(若无边则为无穷大)。然后,对于每一个中间顶点k,检查dist[i][k] + dist[k][j]是否小于dist[i][j],如果是,则更新dist[i][j];意思就是说:如果从 i 到 k 的距离 + k 到 j 的距离 < i 到 j 的距离,就更新;
-
初始化距离矩阵 :设顶点A、B、C、D、E、F分别用0、1、2、3、4、5表示。初始距离矩阵
dist如下(∞表示无穷大):0(A) 1(B) 2(C) 3(D) 4(E) 5(F) 0(A) 0 6 1 2 ∞ ∞ 1(B) 6 0 5 ∞ 3 6 2(C) 1 5 0 5 6 4 3(D) 2 ∞ 5 0 ∞ 2 4(E) ∞ 3 6 ∞ 0 1 5(F) ∞ 6 4 2 1 0 -
考虑中间顶点k = 0(A) :对于每对顶点
i和j,检查dist[i][0] + dist[0][j]是否小于dist[i][j]。经检查,没有更短的路径,矩阵无更新; -
考虑中间顶点k = 1(B) :对于每对顶点
i和j,检查dist[i][1] + dist[1][j]是否小于dist[i][j]。例如:-
i = 0(A),j = 4(E):dist[0][1] + dist[1][4] = 6 + 3 = 9,而dist[0][4] = ∞,所以dist[0][4]更新为9;即原本
dist[0][4] = ∞(A到E的距离是∞),但是dist[0][1] + dist[1][4] = 6 + 3 = 9(A到B + B到E的距离是9),所以更新; -
其他顶点对经检查,无更短路径,矩阵部分更新;
0(A) 1(B) 2(C) 3(D) 4(E) 5(F) 0(A) 0 6 1 2 ∞ ∞ 1(B) 6 0 5 ∞ 3 6 2(C) 1 5 0 5 6 4 3(D) 2 ∞ 5 0 ∞ 2 4(E) 9 3 6 ∞ 0 1 5(F) ∞ 6 4 2 1 0 -
-
考虑中间顶点k = 2(C) :对于每对顶点
i和j,检查dist[i][2] + dist[2][j]是否小于dist[i][j]。例如:i = 0(A),j = 4(E):dist[0][2] + dist[2][4] = 1 + 6 = 7,比之前的9小,所以dist[0][4]更新为7;i = 0(A),j = 5(F):dist[0][2] + dist[2][5] = 1 + 4 = 5,dist[0][5]更新为5;- 其他顶点对经检查,进行相应更新;
0(A) 1(B) 2(C) 3(D) 4(E) 5(F) 0(A) 0 6 1 2 ∞ ∞ 1(B) 6 0 5 ∞ 3 6 2(C) 1 5 0 5 6 4 3(D) 2 ∞ 5 0 ∞ 2 4(E) 7 3 6 ∞ 0 1 5(F) 5 6 4 2 1 0 -
考虑中间顶点k = 3(D) :对于每对顶点
i和j,检查dist[i][3] + dist[3][j]是否小于dist[i][j]。例如:i = 0(A),j = 5(F):dist[0][3] + dist[3][5] = 2 + 2 = 4,比之前的5小,所以dist[0][5]更新为4;
0(A) 1(B) 2(C) 3(D) 4(E) 5(F) 0(A) 0 6 1 2 ∞ ∞ 1(B) 6 0 5 ∞ 3 6 2(C) 1 5 0 5 6 4 3(D) 2 ∞ 5 0 ∞ 2 4(E) 7 3 6 ∞ 0 1 5(F) 4 6 4 2 1 0 -
考虑中间顶点k = 4(E) :对于每对顶点
i和j,检查dist[i][4] + dist[4][j]是否小于dist[i][j]。经检查,无更短路径,矩阵无更新; -
考虑中间顶点k = 5(F) :对于每对顶点
i和j,检查dist[i][5] + dist[5][j]是否小于dist[i][j]。经检查,无更短路径,矩阵无更新; -
最终,通过Floyd算法得到A(0)到F(5)的最短路径长度为4。
-
5 查找
5.1 顺序查找
-
基本思想:从表的一端开始,逐个把表中记录的关键字和给定值做比较。要是有相等的情况,就说明查找成功;要是整个表的记录关键字都和给定值不相等,那查找就失败了;
-
平均查找长度:
- 公式为 ASL=∑i=1nPiCi=1n(1+2+⋯+n)=n+12ASL = \sum_{i = 1}^{n} P_{i}C_{i} = \frac{1}{n}(1 + 2 + \cdots + n) = \frac{n + 1}{2}ASL=∑i=1nPiCi=n1(1+2+⋯+n)=2n+1,这里的 n 是表中记录的个数;
- 它表示在顺序查找中,平均需要比较的关键字次数,反映了查找的平均效率;
-
优点:算法很简单,适用范围也广,对表的结构没有要求,表中的记录也不需要是有序的;
-
缺点:当 n 的值比较大的时候,平均查找长度会比较大,查找的效率就比较低。
-
例:假设有一个整数列表
num_list = [5, 12, 3, 9, 18],现在要查找数字9是否在这个列表中;-
查找过程:
-
从列表的第一个元素开始,也就是
5,将5与要查找的目标值9进行比较,5 != 9,继续查找; -
接着看第二个元素
12,12 != 9,继续下一个; -
再看第三个元素
3,3 != 9,继续查找。; -
然后到第四个元素
9,9 == 9,此时查找成功,找到了目标值在列表中的位置(索引为3的位置) ;
-
-
平均查找长度示例:如果列表
num_list = [5, 12, 3, 9, 18]中每个元素被查找的概率相等,都是 15\frac{1}{5}51;-
查找第一个元素
5时,比较了1次; -
查找第二个元素
12时,比较了2次; -
查找第三个元素
3时,比较了3次; -
查找第四个元素
9时,比较了4次; -
查找第五个元素
18时,比较了5次;
-
-
根据平均查找长度公式 ASL=∑i=1nPiCi=1n(1+2+⋯+n)=n+12ASL = \sum_{i = 1}^{n} P_{i}C_{i} = \frac{1}{n}(1 + 2 + \cdots + n) = \frac{n + 1}{2}ASL=∑i=1nPiCi=n1(1+2+⋯+n)=2n+1 ,这里 n=5n = 5n=5 ,那么 ASL=5+12=3ASL = \frac{5 + 1}{2} = 3ASL=25+1=3 ,意味着平均需要比较3次才能找到目标元素;
-
如果列表中元素数量增多,比如有
100个元素,按照公式计算平均查找长度 ASL=100+12=50.5ASL = \frac{100 + 1}{2} = 50.5ASL=2100+1=50.5 ,也就是平均要比较50.5次才能找到目标元素,由此可见,当 nnn 值较大时,顺序查找效率会变低,这也体现了顺序查找的缺点。
-
5.2 折半(二分)查找
-
折半查找要求表中的元素存储在一维数组(如r1,⋯ ,nr1,\\cdots,nr1,⋯,n)中,并且表中元素按递增方式排序。其核心思想是:将给定值 key 与表中中间位置元素与表中中间位置元素与表中中间位置元素r\[mid\]进行比较;
-
若key==rmidkey == rmidkey==rmid,则查找成功;
-
若key>rmidkey > rmidkey>rmid,说明给定值 key 在后半个子表在后半个子表在后半个子表r\[mid + 1,\\cdots,n\]中,继续对该子表进行折半查找;
-
若key<rmidkey < rmidkey<rmid,说明给定值 key 在前半个子表在前半个子表在前半个子表r\[1,\\cdots,mid - 1\]中,继续对该子表进行折半查找;
-
如此递归,直到查找成功或者子表为空(查找失败);
-
-
平均查找长度:公式为ASL=∑i=1nPiCi=1n∑j=1nj×2j−1≈log2(n+1)−1ASL = \sum_{i = 1}^{n} P_{i}C_{i} = \frac{1}{n}\sum_{j = 1}^{n} j\times 2^{j - 1} \approx \log_{2}(n + 1) - 1ASL=∑i=1nPiCi=n1∑j=1nj×2j−1≈log2(n+1)−1,其中nnn为表中记录的个数;
- 对数函数增长缓慢,所以折半查找平均效率较高;
-
优点:查找效率较高,相比顺序查找,在数据量较大时能大幅减少比较次数;
-
缺点:
-
要求表采用顺序存储结构,因为折半查找需要通过索引快速定位中间元素,链式存储不便于这样操作;
-
表中元素必须有序排列,若元素无序,需要先进行排序,而排序本身是有代价的;
-
插入和删除操作需要移动大量元素,因为要保持元素的有序性,插入或删除一个元素后,可能需要调整其前后元素的位置,当数据量较大时,这会带来较大的开销;
-
-
折半查找的非递归实现:
c// 接收数组r、查找范围的下界low、上界high以及目标值key int Bsearch(int r[], int low, int high, int key) { int mid; while (low <= high) { // 计算中间位置 mid = (low + high) / 2; // 找到目标值 if (key == r[mid]) return mid; // 目标值在右半部分,将low更新为mid + 1 else if (key > r[mid]) low = mid + 1; // 目标值在左半部分,将high更新为mid - 1 else high = mid - 1; } // 直到low > high,查找失败 return -1; } -
折半查找的递归实现:
Cint BsearchRecursive(int r[], int low, int high, int key) { // 递归终止条件:查找范围为空,查找失败 if (low > high) { return -1; } // 计算中间位置 int mid = (low + high) / 2; if (key == r[mid]) { // 查找成功,返回位置 return mid; } else if (key > r[mid]) { // 目标值在右半部分,递归查找右半部分 return BsearchRecursive(r, mid + 1, high, key); } else { // 目标值在左半部分,递归查找左半部分 return BsearchRecursive(r, low, mid - 1, key); } } -
练习:对某有序顺序表进行折半查找(二分查找)时,进行比较的关键字序列不可能是()。
- A.42,61,90,85,77
- B.42,90,85,61,77
- C.90,85,61,77,42
- D.90,85,77,61,42
C
分析选项C
-
先与 90 比较,然后再与 85 比较,说明要查找的数比 90 小。此时看看后面的数有没有比 90 大的;
-
再与 61 比较,说明要查找的数比 85 小。此时看看后面的数有没有比 85 大的;
-
再与 77 比较,说明要查找的数比 61 大。。此时看看后面的数有没有比 61 小的。有,是42
-
所以,进行比较的关键字序列不可能是选项C。
5.3 分块查找
-
分块查找又称索引顺序查找,是对顺序查找方法的一种改进,查找效率介于顺序查找和折半查找之间;
-
表的结构:
- 首先将表分成若干块,每一块内部的关键字不一定有序,但块与块之间是有序的;
- 另外还建立了一个索引表,索引表按关键字有序排列。每一项包含两部分,一部分是对应块的最大关键字,另一部分是该块在原数据中的起始地址;
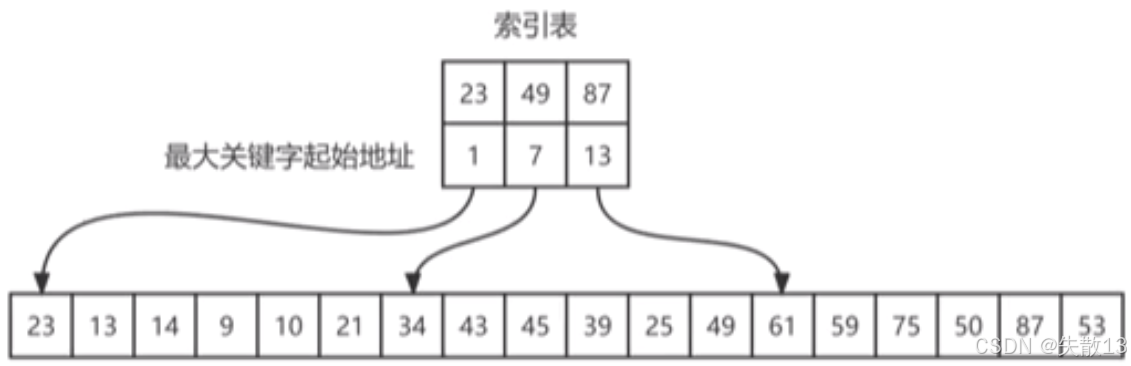
分块情况:
- 整个数据被分成了3块;
- 第一块包含的数据是
23、13、14、9、10、21,这一块内部的关键字是无序的,但块与块之间是有序的,即第一块中的最大关键字(23)小于第二块中的最大关键字(49),第二块中的最大关键字(49)小于第三块中的最大关键字(87); - 第二块包含的数据是
34、43、45、39、25、49,内部无序,最大关键字49; - 第三块包含的数据是
61、59、75、50、87、53,内部无序,最大关键字87;
索引表:
- 第一行的
23、49、87分别是三块的最大关键字; - 第二行的
1、7、13分别是三块在原数据中的起始位置(从1开始计数); - 比如第一块从位置1开始,包含6个元素(到位置6);第二块从位置7开始,包含6个元素(到位置12);第三块从位置13开始,包含6个元素(到位置18);
-
基本思想:
- 第一步,在索引表中确定给定值所在的块;
- 第二步,在确定的块内进行顺序查找;
-
例 :查找目标:
45-
在索引表中查找,目标是找到第一个最大关键字大于或等于
45的块;可用顺序查找或折半查找,此处选择顺序查找;
- **与第一个索引项比较:**因为
45 > 23,所以45不可能在第一块,继续查找下一个块; - 与第二个索引项比较:因为
45 < 49,这说明45可能在第二块中。查找停止,此时确定了要查找的范围是第二块 ,其起始地址是7;
- **与第一个索引项比较:**因为
-
现在知道
45可能在地址7开始的第二块中,只需要在这个块的范围内进行查找;- 查找地址7的元素:
34。34 != 45,继续; - 查找地址8的元素:
43。43 != 45,继续; - 查找地址9的元素:
45。45 == 45,查找成功;
- 查找地址7的元素:
-
-
平均查找长度:
- 公式为 ASL=1b∑j=1bj+1s∑i=1si=b+12+s+12=12(ns+s)+1ASL = \frac{1}{b}\sum_{j = 1}^{b} j + \frac{1}{s}\sum_{i = 1}^{s} i = \frac{b + 1}{2} + \frac{s + 1}{2} = \frac{1}{2}(\frac{n}{s} + s) + 1ASL=b1∑j=1bj+s1∑i=1si=2b+1+2s+1=21(sn+s)+1,其中 bbb 为索引表的大小, sss 为每块记录的个数,表中记录的个数 n=b×sn = b \times sn=b×s;
- 当 sss 取 n\sqrt{n}n 时, ASLmin=n+1ASL_{min} = \sqrt{n} + 1ASLmin=n +1,此时平均查找长度达到最小值;
在查找
45的例子中:- 总数据量 nnn :原数据表共有 181818 个元素;
- 块的数量 bbb :数据被分成了 333 块;
- 每块元素数 sss :因为 n=b×sn = b \times sn=b×s,所以 s=nb=183=6s = \frac{n}{b} = \frac{18}{3} = 6s=bn=318=6(每块有 666 个元素);
索引表查找的平均长度 1b∑j=1bj\frac{1}{b}\sum_{j = 1}^{b} jb1∑j=1bj:
- 若目标在第 111 块,需比较 111 次;
- 若目标在第 2 块,需比较 2 次;
- 若目标在第 3 块,需比较 3 次;
- 平均下来,索引表查找的平均长度为 1+2+33=3+12=2\frac{1 + 2 + 3}{3} = \frac{3 + 1}{2} = 231+2+3=23+1=2(对应公式 b+12\frac{b + 1}{2}2b+1,b=3b = 3b=3 时,3+12=2\frac{3 + 1}{2} = 223+1=2);
块内查找的平均长度 \\frac{1}{s}\\sum_{i = 1}\^{s} i
- 若目标是块内第 111 个元素,需比较 111 次;
- 若目标是块内第 2 个元素,需比较 2 次;
- ......
- 若目标是块内第 666 个元素,需比较 666 次;
- 平均下来,块内查找的平均长度为 1+2+⋯+66=6+12=3.5\frac{1 + 2 + \cdots + 6}{6} = \frac{6 + 1}{2} = 3.561+2+⋯+6=26+1=3.5(对应公式 s+12\frac{s + 1}{2}2s+1,s = 6 时,时,时,\\frac{6 + 1}{2} = 3.5);
总平均查找长度 ASLASLASL
-
将两部分相加,总平均查找长度为:
ASL=索引表平均长度+块内平均长度=2+3.5=5.5 ASL = \text{索引表平均长度} + \text{块内平均长度} = 2 + 3.5 = 5.5 ASL=索引表平均长度+块内平均长度=2+3.5=5.5 -
用公式计算验证:
ASL=12(ns+s)+1=12(186+6)+1=12(3+6)+1=4.5+1=5.5 ASL = \frac{1}{2}\left( \frac{n}{s} + s \right) + 1 = \frac{1}{2}\left( \frac{18}{6} + 6 \right) + 1 = \frac{1}{2}(3 + 6) + 1 = 4.5 + 1 = 5.5 ASL=21(sn+s)+1=21(618+6)+1=21(3+6)+1=4.5+1=5.5 -
结果一致;
最小平均查找长度
-
当 s = \\sqrt{n} 时,ASLASLASL 达到最小值 \\sqrt{n} + 1 ;
-
在例子中,n=18n = 18n=18,则 18≈4.24\sqrt{18} \approx 4.2418 ≈4.24。若每块元素数 sss 取 444 或 555(接近 18\sqrt{18}18 ),重新分块后,平均查找长度会比当前 5.55.55.5 更小。
总结:分块查找的平均查找长度,是"索引表查找的平均次数"与"块内查找的平均次数"之和,且可通过调整每块元素数 sss 来优化总效率;
-
优点:查找效率好于顺序查找,能够通过索引表快速确定给定值所在的块;
-
缺点:查找效率不及折半查找。
5.4 哈希表
5.4.1 介绍
-
前面的顺序查找、折半查找、分块查找都是以关键字比较为基础,而哈希表(也称为散列表)不同,它通过计算以记录的关键字为自变量的函数(哈希函数)来得到该记录的存储地址。在查找操作时,用同一哈希函数 H(key) 计算待查记录的存储地址,到相应的存储单元中匹配信息来判定是否查找成功;
-
哈希函数的构造方法:有直接定址法、数字分析法、平方取中法、折叠法、随机数法、除留余数法等;
直接定址法
-
取关键字或关键字的某个线性函数值为哈希地址,即 H(key)=a×key+bH(key)=a \times key + bH(key)=a×key+b( a 、、、b 为常数);
-
示例 :假设要对一个小型的学生成绩管理系统中的学生成绩进行哈希存储,学生的学号是从 1000−10991000 - 10991000−1099,我们可以直接把学号作为哈希地址,即 H(key)=keyH(key) = keyH(key)=key 。比如学号为 102310231023 的学生成绩,就直接存放在哈希表的第 102310231023 个位置;
数字分析法
-
数字分析法是对关键字进行分析,找出其中分布均匀的若干位作为哈希地址;
-
示例 :假设有一组关键字是 10 位的号码,如 881234567888123456788812345678、882345678988234567898823456789 、883456789088345678908834567890 等,前两位都是 888888 ,最后两位分布也不均匀,而中间的 123412341234、234523452345、345634563456 等分布相对均匀,就可以取中间的 444 位作为哈希地址。比如对于 881234567888123456788812345678 ,其哈希地址 H(key)=1234H(key) = 1234H(key)=1234 ;
平方取中法
-
先求出关键字的平方值,然后按需要取平方值的中间若干位作为哈希地址;
-
示例 :假设关键字 key=43key = 43key=43 ,先计算 432=184943^2 = 1849432=1849 ,如果需要一个两位的哈希地址,就取中间的 848484 ,即 H(key)=84H(key)=84H(key)=84 ;
折叠法
-
将关键字分割成位数相同的几部分(最后一部分的位数可以不同),然后取这几部分的叠加和(舍去进位)作为哈希地址;
-
示例 :假设关键字 key=1234567890key = 1234567890key=1234567890 ,把它分成 123123123、456456456、789789789、000 这几部分 ,然后计算 123+456+789+0=1368123 + 456 + 789 + 0 = 1368123+456+789+0=1368 ,舍去进位后,取 368368368 作为哈希地址,即 H(key)=368H(key)=368H(key)=368 ;
随机数法
-
选择一个随机函数,取关键字的随机函数值为它的哈希地址,即 H(key)=random(key)H(key) = random(key)H(key)=random(key) ,其中 randomrandomrandom 为随机函数;
-
示例 :在一个需要对游戏角色ID进行哈希存储的场景中,可以使用编程语言自带的随机函数库来实现。假设游戏角色ID是从 1 - 10000 ,在Python中使用
random库,如import random,然后定义 H(key) = random.randint(0, 999) (这里假设哈希表大小为 1000 ),比如角色ID为 345634563456 ,通过这个哈希函数可能得到的哈希地址是 123123123 (每次运行结果会不同,因为是随机的);
除留余数法
- 取关键字被某个不大于哈希表表长 mmm 的数 ppp 除后所得的余数为哈希地址,即 H(key)=key%pH(key)=key \% pH(key)=key%p ,p≤mp\leq mp≤m ,并且 ppp 应尽量取质数;
- 示例 :假设哈希表表长 m=11m = 11m=11 ,要对一组整数关键字进行哈希存储,对于关键字 key=25key = 25key=25 ,则 H(key)=25%11=3H(key)=25 \% 11 = 3H(key)=25%11=3 ;对于关键字 key=37key = 37key=37 ,则 H(key)=37%11=4H(key)=37 \% 11 = 4H(key)=37%11=4 ;
-
-
处理冲突的方法:对于不同的关键字,却有相同的哈希函数值,这种情况称为冲突。解决冲突就是为出现冲突的关键字找到另一个尚未使用的哈希地址。常见的处理冲突的方法有:
- 开放定址法
- 链地址法
5.4.2 开放定址法
-
公式为Hi=(H(key)+di)%m,i=1,2,⋯ ,k(k≤m−1)H_{i}=(H(key)+d_{i})\%m, i = 1,2,\cdots,k(k\leq m - 1)Hi=(H(key)+di)%m,i=1,2,⋯,k(k≤m−1),其中HiH_{i}Hi为哈希地址,H(key)H(key)H(key)为哈希函数,mmm为哈希表表长,did_{i}di为增量序列;
-
常见的增量序列有以下三种:
-
di=1,2,⋯ ,m−1d_{i}=1,2,\cdots,m - 1di=1,2,⋯,m−1,称为线性探测再散列;
-
di=12,−12,22,−22,⋯ ,±k2(k≤m2)d_{i}=1^{2},-1^{2},2^{2},-2^{2},\cdots,\pm k^{2}(k\leq\frac{m}{2})di=12,−12,22,−22,⋯,±k2(k≤2m),称为二次探测再散列;
-
did_{i}di为伪随机数序列,称为随机探测再散列;
例:假设哈希表表长 m=11m = 11m=11,哈希函数 H(key)=key%11H(key) = key \% 11H(key)=key%11,现在要插入关键字 key=12key = 12key=12,计算初始哈希地址 H(12)=12%11=1H(12) = 12 \% 11 = 1H(12)=12%11=1,但地址 111 已经被占用(比如已存有关键字 111),此时需要用开放定址法解决冲突;
线性探测再散列(di=1,2,⋯ ,m−1d_i = 1,2,\cdots,m - 1di=1,2,⋯,m−1)
- 当第一次计算的哈希地址 H0=1H_0 = 1H0=1 被占用时,按照线性探测再散列的规则,增量 d1=1d_1 = 1d1=1,计算下一个哈希地址 H1=(H(12)+d1)%m=(1+1)%11=2H_1=(H(12)+d_1)\%m=(1 + 1)\%11 = 2H1=(H(12)+d1)%m=(1+1)%11=2;
- 如果地址 222 仍被占用,增量 d2=2d_2 = 2d2=2,计算 H2=(1+2)%11=3H_2=(1 + 2)\%11 = 3H2=(1+2)%11=3,以此类推,直到找到一个空闲的地址;
二次探测再散列(di=12,−12,22,−22,⋯ ,±k2(k≤m2)d_i = 1^2,-1^2,2^2,-2^2,\cdots,\pm k^2(k\leq\frac{m}{2})di=12,−12,22,−22,⋯,±k2(k≤2m))
- 同样初始哈希地址 H0=1H_0 = 1H0=1 被占用,首先取 d1=12=1d_1 = 1^2 = 1d1=12=1,计算 H1=(1+1)%11=2H_1=(1 + 1)\%11 = 2H1=(1+1)%11=2;
- 若地址 222 被占用,取 d2=−12=−1d_2 = -1^2 = -1d2=−12=−1,计算 H2=(1−1)%11=0H_2=(1 - 1)\%11 = 0H2=(1−1)%11=0;
- 若地址 000 被占用,取 d3=22=4d_3 = 2^2 = 4d3=22=4,计算 H3=(1+4)%11=5H_3=(1 + 4)\%11 = 5H3=(1+4)%11=5;
- 若地址 555 被占用,取 d4=−22=−4d_4 = -2^2 = -4d4=−22=−4,计算 H4=(1−4)%11=8H_4=(1 - 4)\%11 = 8H4=(1−4)%11=8(因为 (1−4)=−3(1 - 4) = -3(1−4)=−3,−3%11=8-3 \% 11 = 8−3%11=8,在取模运算中,负数取模结果为正数,等于模数加上该负数对模数取余的结果),依此类推,直到找到空闲地址;
随机探测再散列(did_idi 为伪随机数序列)
- 假设有一个伪随机数生成器,生成的伪随机数序列为 3,5,2,⋯3, 5, 2, \cdots3,5,2,⋯
- 初始哈希地址 H0=1H_0 = 1H0=1 被占用,取第一个伪随机数 d1=3d_1 = 3d1=3,计算 H1=(1+3)%11=4H_1=(1 + 3)\%11 = 4H1=(1+3)%11=4;
- 若地址 444 被占用,取第二个伪随机数 d_2 = 5 ,计算 H_2=(1 + 5)%11 = 6 ;
- 若地址 666 被占用,取第三个伪随机数 d_3 = 2 ,计算 H_3=(1 + 2)%11 = 3 ,以此类推,直到找到空闲地址;
-
-
练习:

-
哈希函数为 Hash(key)=keymod 11Hash(key) = key \mod 11Hash(key)=keymod11,计算每个关键字的初始哈希地址:
关键字 keymod 11key \mod 11keymod11 初始哈希地址 47 47mod 11=347 \mod 11 = 347mod11=3 3 34 34mod 11=134 \mod 11 = 134mod11=1 1 13 13mod 11=213 \mod 11 = 213mod11=2 2 12 12mod 11=112 \mod 11 = 112mod11=1 1 52 52mod 11=852 \mod 11 = 852mod11=8 8 38 38mod 11=538 \mod 11 = 538mod11=5 5 33 33mod 11=033 \mod 11 = 033mod11=0 0 27 27mod 11=527 \mod 11 = 527mod11=5 5 3 3mod 11=33 \mod 11 = 33mod11=3 3 -
用线性探测再散列解决冲突,构造哈希表
-
插入 47。初始地址 333 为空,直接插入。哈希表地址 333:关键字 47 ,查找次数 111。
-
插入 34。初始地址 111 为空,直接插入。哈希表地址 111:关键字 34 ,查找次数 111;
-
插入 13。初始地址 222 为空,直接插入。哈希表地址 222:关键字 13 ,查找次数 111;
-
插入 12
- 初始地址 111 已被 343434 占用(冲突),探测下一个地址 (1+1)mod 11=2(1 + 1) \mod 11 = 2(1+1)mod11=2,地址 222 已被 131313 占用(冲突),继续探测下一个地址 (1+2)mod 11=3(1 + 2) \mod 11 = 3(1+2)mod11=3,地址 333 已被 474747 占用(冲突),继续探测下一个地址 (1+3)mod 11=4(1 + 3) \mod 11 = 4(1+3)mod11=4,地址 444 为空,插入;
- 哈希表地址 444:关键字 121212,查找次数 444(探测了 1,2,3,41,2,3,41,2,3,4,共 444 次);
-
插入 5。初始地址 888 为空,直接插入。哈希表地址 888:关键字 525252,查找次数 111;
-
插入 38。初始地址 555 为空,直接插入。哈希表地址 555:关键字 383838,查找次数 111;
-
插入 33。初始地址 000 为空,直接插入。哈希表地址 000:关键字 333333,查找次数 111;
-
插入 27
-
初始地址 555 已被 383838 占用(冲突),探测下一个地址 (5+1)mod 11=6(5 + 1) \mod 11 = 6(5+1)mod11=6,地址 666 为空,插入;
-
哈希表地址 666:关键字 27 ,查找次数 222(探测了 5,6 ,共 222 次);
-
-
插入 3
-
初始地址 333 已被 474747 占用(冲突),探测下一个地址 (3+1)mod 11=4(3 + 1) \mod 11 = 4(3+1)mod11=4,地址 444 已被 121212 占用(冲突),继续探测下一个地址 (3+2)mod 11=5(3 + 2) \mod 11 = 5(3+2)mod11=5,地址 555 已被 383838 占用(冲突),继续探测下一个地址 (3+3)mod 11=6(3 + 3) \mod 11 = 6(3+3)mod11=6,地址 666 已被 272727 占用(冲突),继续探测下一个地址 (3+4)mod 11=7(3 + 4) \mod 11 = 7(3+4)mod11=7,地址 777 为空,插入;
-
哈希表地址 777:关键字 333,查找次数 555(探测了 3,4,5,6,73,4,5,6,73,4,5,6,7,共 555 次);
-
-
-
构造最终的哈希表
哈希地址 0 1 2 3 4 5 6 7 8 9 10 关键字 33 34 13 47 12 38 27 3 52 空 空 -
计算平均查找长度(ASL)
-
平均查找长度 ASL=总查找次数关键字个数ASL = \frac{\text{总查找次数}}{\text{关键字个数}}ASL=关键字个数总查找次数;
-
总查找次数为:1+1+1+4+1+1+2+5=161 + 1 + 1 + 4 + 1 + 1 + 2 + 5 = 161+1+1+4+1+1+2+5=16(每个关键字的查找次数相加);
-
关键字个数为 999;
-
因此,ASL=169≈1.78ASL = \frac{16}{9} \approx 1.78ASL=916≈1.78。
-
-
5.4.3 链地址法
-
将冲突的元素存放在一个链表中,通过链表查找冲突的数据元素;
-
以上一节的练习为例:
- 哈希地址为111的位置,有343434和121212两个元素冲突,就通过链表将它们连接起来;
- 哈希地址为333的位置,474747和333冲突,也通过链表连接;
- 哈希地址为555的位置,383838和272727冲突,同样用链表连接;
哈希地址 指针 哈希地址0 33 哈希地址1 34 12 哈希地址2 13 哈希地址3 47 3 哈希地址4 哈希地址5 38 27 哈希地址6 哈希地址7 哈希地址8 52 哈希地址9 哈希地址10
-
其它处理哈希冲突的方法:
-
再哈希法
-
建立一个公共溢出区
-
6 排序
-
排序的定义 :将任意排列的一组元素变成一组有序排列(递增或递减)的元素;
-
排序的分类:
-
稳定排序与不稳定排序:待排元素中的相同值在排序后的次序关系不变,这样的排序称为稳定排序,否则为不稳定排序;
比如
9 7 5 6 5排序后变成5 5 6 7 9;排序前在前面的5在排序后仍在前面,排序后在后面的5仍在后面,就是稳定排序;
-
内排序和外排序:排序在内存中进行的称为内排序,在外存中进行的称为外排序。
-
6.1 直接插入排序
- 将待排元素插入到有序序列 的合适位置中,是一种稳定的排序方法;
- 排序步骤 :在插入第iii个记录时,R1,R2,⋯ ,Ri−1R_1, R_2, \cdots, R_{i - 1}R1,R2,⋯,Ri−1均已排好序,此时将第iii个记录依次与Ri−1,⋯ ,R2,R1R_{i - 1}, \cdots, R_2, R_1Ri−1,⋯,R2,R1进行比较,找到合适的位置插入,插入位置及其之后的记录依次向后移动;
- 时间复杂度 :
- 最好情况:元素已经是正序排列,此时每次插入只需要比较111次,时间复杂度为O(n)O(n)O(n);
- 最坏情况:元素是逆序排列,此时每次插入需要比较iii次(iii从222到nnn),时间复杂度为O(n2)O(n^2)O(n2);
- 空间复杂度 :只需要一个临时变量记录待排元素的值(哨兵),空间复杂度为O(1)O(1)O(1)。
6.2 希尔排序
-
希尔排序是对直接插入排序的改进,本质是一种分组插入排序 ,是一种不稳定的排序方法;
-
基本思想:将待排元素按一定"增量"进行分组,然后对每个分组分别进行直接插入排序;随着增量的减小,一直到增量为111,从而使整个序列变得有序;
-
增量的取值:增量序列通常取d1=n/2,d2=d1/2,d3=d2/2,⋯ ,di=1d_1 = n/2, d_2 = d_1/2, d_3 = d_2/2, \cdots, d_i = 1d1=n/2,d2=d1/2,d3=d2/2,⋯,di=1(nnn为待排序元素个数);
-
时间复杂度:约为O(n1.3)O(n^{1.3})O(n1.3),相比直接插入排序,在数据量较大时,效率有明显提升;
-
空间复杂度:仅需要一个元素的辅助空间,空间复杂度为O(1)O(1)O(1);
-
例:将下面的数据通过希尔排序,得到一个从小到大排列的序列
49 38 65 97 76 13 -
第1趟希尔排序(增量d1=6/2=3d_1 = 6/2 = 3d1=6/2=3):
- 按增量333分组,将元素分为333组,每组元素下标相差333:
- 第1组:
49(下标000)、97(下标333); - 第2组:
38(下标 1 )、'76'(下标)、\`76\`(下标)、'76'(下标 4 ); - 第3组:
65(下标222)、13(下标555);
- 第1组:
- 对每组分别进行直接插入排序:
- 第1组
49、97,已有序,无需调整; - 第2组
38、76,已有序,无需调整; - 第3组
65、13,排序后变为13、65;
- 第1组
- 此时序列变为
49、38、13、97、76、65;
- 按增量333分组,将元素分为333组,每组元素下标相差333:
-
第2趟希尔排序(增量d_2 = 3/2 = 2 ):
- 按增量 2 分组,将元素分为分组,将元素分为分组,将元素分为 2 组,每组元素下标相差组,每组元素下标相差组,每组元素下标相差 2 :
- 第1组:
49(下标 0 )、'13'(下标)、\`13\`(下标)、'13'(下标 2 )、'76'(下标)、\`76\`(下标)、'76'(下标 4 ); - 第2组:
38(下标111)、97(下标333)、65(下标555);
- 第1组:
- 对每组分别进行直接插入排序:
- 第1组
49、13、76,排序后变为13、49、76; - 第2组
38、97、65,排序后变为38、65、97;
- 第1组
- 此时序列变为
13、38、49、65、76、97;
- 按增量 2 分组,将元素分为分组,将元素分为分组,将元素分为 2 组,每组元素下标相差组,每组元素下标相差组,每组元素下标相差 2 :
-
第3趟希尔排序(增量d_3 = 2/2 = 1 ) :增量为111,此时整个序列作为一组,进行直接插入排序。由于经过前两趟排序,序列已基本有序,直接插入排序效率很高,最终得到有序序列
13、38、49、65、76、97。
-
6.3 冒泡排序
-
冒泡排序是交换排序的一种,是一种稳定的排序方法;
-
基本思想:两两比较待排元素,若次序相反,则交换位置,直到整个序列没有反序。它是通过相邻元素之间的比较和交换,将最大元素(或最小元素)交换到顶层的位置上;
-
时间复杂度:为O(n2)O(n^2)O(n2),其中nnn是待排序元素的个数,在最坏情况下(元素完全逆序),需要进行n−1n - 1n−1趟排序,每趟进行 n - i 次比较(次比较(次比较(i为趟数);
-
空间复杂度:仅需要一个元素的辅助空间用于交换元素,空间复杂度为O(1)O(1)O(1);
-
例:将序列
49、38、65、97、76、13从小到大排序-
第1趟冒泡排序:
- 从第一个元素开始,依次比较相邻的两个元素:
- 比较
49和38,因为 49 \> 38 ,次序相反,交换它们的位置,序列变为38、49、65、97、76、13; - 接着比较
49和65,49<6549 < 6549<65,次序正确,不交换; - 比较
65和97,65<9765 < 9765<97,次序正确,不交换; - 比较
97和76,97>7697 > 7697>76,次序相反,交换位置,序列变为38、49、65、76、97、13; - 比较
97和13,97>1397 > 1397>13,次序相反,交换位置,序列变为38、49、65、76、13、97;
- 比较
- 经过第1趟排序,最大的元素
97被交换到了最后一位(顶层位置);
- 从第一个元素开始,依次比较相邻的两个元素:
-
第2趟冒泡排序:
- 此时待排序的元素是前 5 个(
38、49、65、76、13),继续从第一个元素开始相邻比较:- 比较
38和49, 38 \< 49 ,次序正确,不交换; - 比较
49和65, 49 \< 65 ,次序正确,不交换; - 比较
65和76, 65 \< 76 ,次序正确,不交换; - 比较
76和13, 76 \> 13 ,次序相反,交换位置,序列变为38、49、65、13、76、97;
- 比较
- 这一趟排序后,第二大的元素
76被交换到了倒数第二位;
- 此时待排序的元素是前 5 个(
-
后续趟数(补充完整过程):
- 第3趟冒泡排序 :待排序元素为前444个(
38、49、65、13)。经过比较交换,会将65交换到倒数第三位,序列变为38、49、13、65、76、97; - 第4趟冒泡排序 :待排序元素为前333个(
38、49、13)。经过比较交换,会将49交换到倒数第四位,序列变为38、13、49、65、76、97; - 第5趟冒泡排序 :待排序元素为前222个(
38、13)。比较后交换,得到13、38、49、65、76、97,此时整个序列有序;
- 第3趟冒泡排序 :待排序元素为前444个(
-
通过多趟相邻元素的比较与交换,逐步将大的元素"冒泡"到序列的末尾,最终使整个序列有序;
-
-
代码:
cvoid BubbleSort(int arr[], int n) { // 外层循环控制排序趟数,共需 n-1 趟 for (int i = 0; i < n - 1; i++) { // 内层循环负责每趟比较和交换 for (int j = 0; j < n - 1 - i; j++) { // 每次比较相邻元素 if (arr[j] > arr[j + 1]) { // 若逆序则交换 int temp = arr[j]; arr[j] = arr[j + 1]; arr[j + 1] = temp; } } } } -
优化代码:增加 swapped 标志位,检测是否发生交换。若某趟排序未发生任何交换,说明数组已完全有序,可提前终止循环
cvoid BubbleSortOptimized(int arr[], int n) { int swapped; for (int i = 0; i < n - 1; i++) { swapped = 0; // 标志位,初始化为未交换 for (int j = 0; j < n - 1 - i; j++) { if (arr[j] > arr[j + 1]) { // 交换相邻元素 int temp = arr[j]; arr[j] = arr[j + 1]; arr[j + 1] = temp; swapped = 1; // 发生交换,置标志位 } } // 若一趟排序未发生任何交换,说明已完全有序 if (swapped == 0) { break; } } }
6.4 快速排序
-
快速排序是对冒泡排序的一种改进,是一种不稳定的排序方法;
-
基本思想:通过一趟排序将要排序的数据分成独立的两个部分,其中一部分的所有数据都比另外一部分的所有数据要小,然后再分别对这两个部分进行快速排序,整个排序过程可以递归进行,从而使整个序列有序;
-
排序步骤
- 在待排元素中任选一数据元素,以该元素为基准,将待排元素分为两部分,一部分小于该元素,一部分大于该元素;
- 采用相同的方法对上一步的两部分分别进行快速排序;
-
时间复杂度
-
平均情况:O(nlog2n)O(n\log_{2}n)O(nlog2n);
-
最坏情况:即初始序列按关键字有序或基本有序时,快速排序的时间复杂度为O(n2)O(n^{2})O(n2);
-
-
空间复杂度:需要栈空间来实现递归,栈空间最大深度为log2n+1\log_{2}n + 1log2n+1,则空间复杂度为O(log2n)O(\log_{2}n)O(log2n);
-
例:将序列
49、38、65、97、76、13、27从小到大排序-
第1趟快排(基准取第一个元素,
pivot = 49,即经过第一趟快排后,要使得左边的数都<49,右边的数都>49):从
low开始向右边找第一个大于 pivot 的元素,若找到则和high位置交换,即要将小的数放到low同时high指针左移一位;从
high开始向左找第一个小于 pivot 的元素,若找到则和low位置交换,同时low指针右移一位;重复直到
low == high,最后把基准放到这个位置;通俗理解:
- 要将小的数放到
low这一边,要将大的数放到high这一边; - 交换到哪一边,哪一边就要移动指针。即小的数被放到
low这一边,low就要移动指针。大的数被放到high这一边,high就要移动指针; - 可以通过此视频来辅助理解
high和low指针的移动方式:https://v.douyin.com/wGLT0VMe9Q8/;
-
初始时,
low = 0(指向49),high = 6(指向27);地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 low high -
比较
low = 0(指向49)和high = 6(指向27)所指向的值,49 > 27,将二者指向的值交换。low右移一位(low = 1),继续找比49大的元素;地址 0 1 2 3 4 5 6 数据 27 38 65 97 76 13 49 low high -
比较
low = 1(指向38)和high = 6(指向49)所指向的值,38 < 49,小于49的数在49的左边,符合排序规则,不交换。low右移一位(low = 2),继续找比49大的元素;地址 0 1 2 3 4 5 6 数据 27 38 65 97 76 13 49 low high -
比较
low = 2(指向65)和high = 6(指向49)所指向的值,65 > 49,将二者指向的值交换。high左移一位(high = 5),继续找比49小的元素;地址 0 1 2 3 4 5 6 数据 27 38 49 97 76 13 65 low high -
比较
low = 2(指向49)和high = 5(指向13)所指向的值,49 > 13,将二者指向的值交换。low右移一位(low = 3),继续找比49大的元素;地址 0 1 2 3 4 5 6 数据 27 38 13 97 76 49 65 low high -
比较
low = 3(指向97)和high = 5(指向49)所指向的值,97 > 49,将二者指向的值交换。high左移一位(high = 4),继续找比49小的元素;地址 0 1 2 3 4 5 6 数据 27 38 13 49 76 97 65 low high -
比较
low = 3(指向49)和high = 4(指向76)所指向的值,49 < 76,大于49的数在49的右边,符合排序规则,不交换。high左移一位(high= 3),继续找比49小的元素;地址 0 1 2 3 4 5 6 数据 27 38 13 49 76 97 65 low high -
low = high = 3,第一趟快排结束。此时49的左边都是小于49的数,49的右边都是大于49的数;
- 要将小的数放到
-
第2趟快排(对基准
49左边的子序列27、38、13进行快速排序,基准取第一个元素,pivot = 27): -
第3趟快排(对基准
49右边的子序列76、97、65进行快速排序,基准取第一个元素,pivot = 76):
-
-
代码:
C#include <iostream> using namespace std; const int N = 1e6 + 10; int n; int q[N]; void quick_sort(int q[], int l, int r) { // 当左指针大于等于右指针时,就直接退出 if (l >= r) return; // 以最左边的数为分界点,i和j指针的初值分别指向数组的左右边界之外 int x = q[l], i = l - 1, j = r + 1; while (i < j) { // 先让i指针往中间方向移动一个位置,当i指针所指向的元素小于分界点时,就循环执行i++ do i++; while (q[i] < x); // 先让j指针往中间方向移动一个位置,当j指针所指向的元素大于分界点时,就循环执行j++ do j--; while (q[j] > x); // 当i指针和j指针都停止,且i指针还在j指针左边时,交换两个指针指向的元素 if (i < j) swap(q[i], q[j]); } // 先递归的排序左区间 quick_sort(q, l, j); // 再递归的排序右区间 quick_sort(q, j + 1, r); } int main() { scanf("%d", &n); for (int i = 0; i < n; i++) scanf("%d", &q[i]); // 传入q数组,和数组的左右边界索引 quick_sort(q, 0, n - 1); for (int i = 0; i < n; i++) printf("%d ", q[i]); return 0; }
6.5 简单选择排序
-
简单选择排序属于选择排序的一种,其基本思想是:从待排元素里选出最小的元素,把它放在已排序序列的末尾(通过和末尾后的第一个元素交换位置来实现),不断重复这个过程。并且,它是一种不稳定的排序方法;
-
时间复杂度 :为 O(n2)O(n^2)O(n2)。这是因为在排序过程中,需要进行两层循环操作,外层循环控制排序的趟数,大约 nnn 次;内层循环用于在每一趟中寻找最小元素,大约 nnn 次,所以总的操作次数是 n×nn\times nn×n 量级,时间复杂度为 O(n2)O(n^2)O(n2)。
-
空间复杂度 :仅需要一个元素的辅助空间来进行元素交换等操作,所以空间复杂度为 O(1)O(1)O(1);
-
例:将序列
49、38、65、97、76、13、27从小到大排序-
第1趟排序
-
初始数据为:地址0到6对应的数据依次是49、38、65、97、76、13、27。要选择最小的元素放在位置0;
-
首先,i 指向要将最小的元素放置的位置(初始默认是位置0),min 指向当前最小的元素(初始默认是49),j 指向指向(初始默认是位置1);
地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 min i j -
将 j 指向的元素的值与 min 指向的元素的值比较,发现 38 < 49,则将 min 指向 38,同时 j 后移一位;
地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 i min j -
将 j 指向的元素的值与 min 指向的元素的值比较,发现 65 > 38,min 指针不动,同时 j 后移一位;
地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 i min j -
将 j 指向的元素的值与 min 指向的元素的值比较,发现 97 > 38,min 指针不动,同时 j 后移一位;
地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 i min j -
将 j 指向的元素的值与 min 指向的元素的值比较,发现 76 > 38,min 指针不动,同时 j 后移一位;
地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 i min j -
将 j 指向的元素的值与 min 指向的元素的值比较,发现 13 < 38,则将 min 指向 13,同时 j 后移一位;
地址 0 1 2 3 4 5 6 数据 49 38 65 97 76 13 27 i min j -
将 j 指向的元素的值与 min 指向的元素的值比较,发现 27 > 13,min 指针不动,同时 j 后移一位。此时 j 已经超出数组范围,第一趟排序结束;
- 将 min 的值与 i 的值交换;
- i 指向下一个要将最小的元素放置的位置(位置1);
- min 和 i 指向同一个位置(位置1);
- j 指向 i 的下一个位置(位置2)
地址 0 1 2 3 4 5 6 数据 13 38 65 97 76 49 27 i min j
-
-
第2趟排序
-
现在数据变为:地址0到6对应的数据依次是13、38、65、97、76、49、27。接下来要选择最小的元素放在位置1;
地址 0 1 2 3 4 5 6 数据 13 38 65 97 76 49 27 i min j -
......
-
-
6.6 堆排序
-
堆排序是选择排序的一种。堆是特殊的完全二叉树,堆顶元素(根结点)是堆中的最大值(大根堆)或最小值(小根堆),且任何一颗子树也都是堆;
完全二叉树:一棵深度为 kkk、有 nnn 个节点的二叉树,按从上至下、从左到右 的顺序对节点编号。若编号为 i(1 \\leq i \\leq n) 的节点,与满二叉树中编号为 iii 的节点在二叉树中的位置相同,这棵二叉树就是完全二叉树;
-
基本思想
-
将待排元素建立一个初始堆;
-
输出堆顶的元素,即最大值(大根堆)或最小值(小根堆);
-
将剩余待排元素重新建立一个新的堆,重复上述步骤,直到所有元素排序完成;
-
-
建立初始堆的步骤
-
对待排元素按层次遍历,构建一棵完全二叉树;
-
从最后一个非叶子节点开始,按照堆的定义进行调整,使得父节点的值满足大根堆(父节点值大于子节点值)或小根堆(父节点值小于子节点值)的要求;
-
-
时间复杂度 :O(nlog2n)O(n\log_2 n)O(nlog2n)。建堆过程的时间复杂度为 O(n)O(n)O(n),每次调整堆的时间复杂度为 O(log2n)O(\log_2 n)O(log2n),总共需要 nnn 次调整,所以总体时间复杂度为 O(nlog2n)O(n\log_2 n)O(nlog2n);
-
空间复杂度 :仅需要一个元素的辅助空间用于元素交换等操作,空间复杂度为 O(1)O(1)O(1);
-
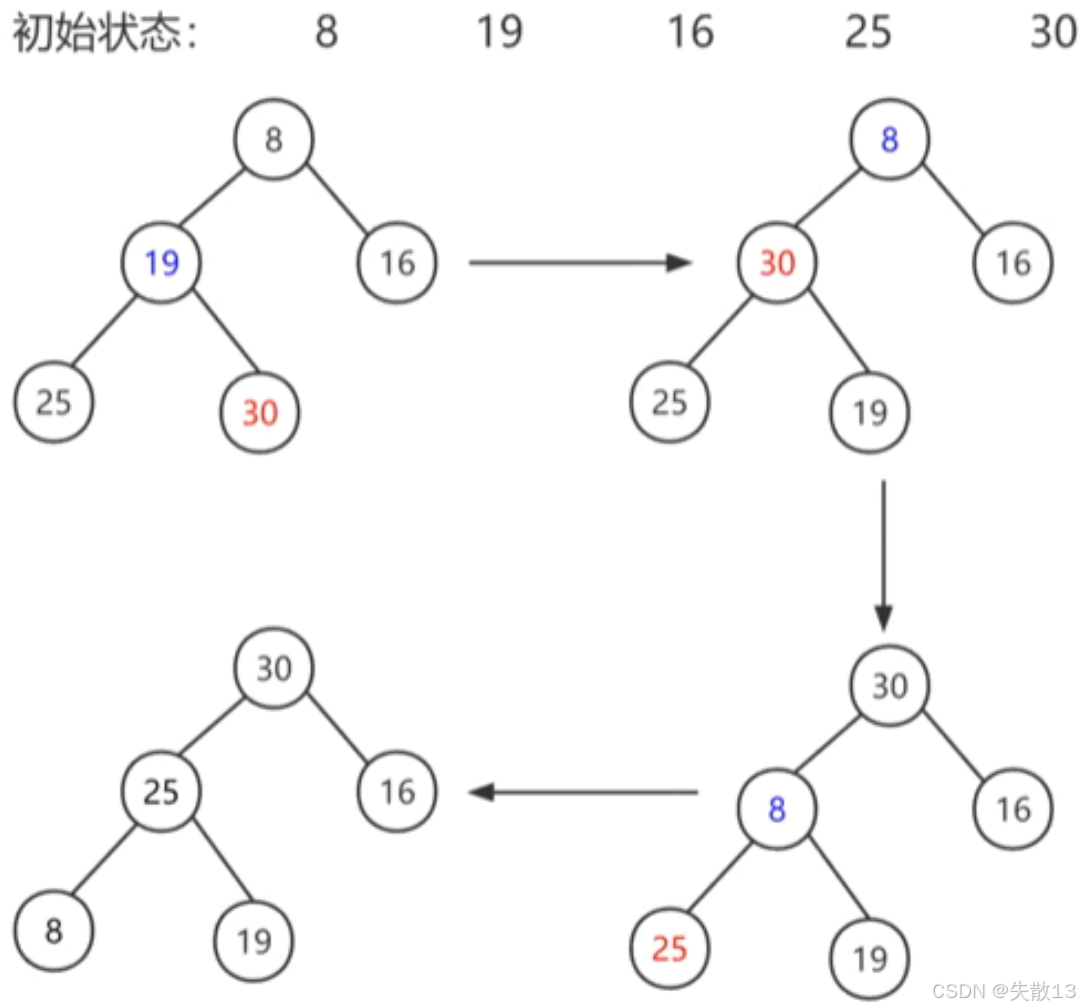
例:将序列
8、19、16、25、30构建成大根堆- 首先按层次遍历构建完全二叉树(左上角图)
- 从最后一个非叶子节点(值为19的节点)开始调整。比较19与其子节点25和30,30是最大的,所以19和30交换位置(右上角图);
- 接着调整根节点8,比较8与其子节点30和16,30最大,8和30交换位置(右下角图);
- 以8为根节点的子树此时不是大根堆,所以再次调整,8和25交换位置(左下角图);
6.7 归并排序
-
归并排序的基本思想是将两个有序序列合并为一个有序序列,它采用分治法的策略,并且是一种稳定的排序方法;
-
时间复杂度 :为 O(nlog2n)O(n\log_2 n)O(nlog2n)。因为归并排序需要不断将序列分成两半,然后再合并,分的过程时间复杂度是 O(log2n)O(\log_2 n)O(log2n),合并的过程时间复杂度是 O(n)O(n)O(n),所以总的时间复杂度是 O(nlog2n)O(n\log_2 n)O(nlog2n);
-
空间复杂度 :需要 nnn 个元素的辅助空间来存储合并后的序列,所以空间复杂度为 O(n)O(n)O(n);
-
例:初始序列为6、8、7、9、0、1、3、2、4、5
-
分组与初步合并
-
首先将序列两两分组,得到6,86,86,8、7,97,97,9、0,10,10,1、3,23,23,2、4,54,54,5这几个小组;
6 8 7 9 0 1 3 2 4 5 -
对每个小组内部进行排序合并,因为每个小组只有两个元素,比较后即可得到有序的小组:6,86,86,8(6和8已有序)、7,97,97,9(7和9已有序)、0,10,10,1(0和1已有序)、2,32,32,3(3和2比较后交换得到)、4,54,54,5(4和5已有序);
6 8 7 9 0 1 3 2 4 5 \ / \ / \ / \ / \ / 68 79 01 23 45
-
-
进一步合并:接着将这些长度为2的有序子序列两两合并;
-
6,86,86,8和7,97,97,9合并,比较6与7,6小先放入。然后8与7比较,7小放入。接着8与9比较,8小放入,最后放入9,得到6,7,8,96,7,8,96,7,8,9;
-
0,10,10,1和2,32,32,3合并,0最小先放入,然后1、2、3依次放入,得到0,1,2,30,1,2,30,1,2,3;
-
4,54,54,5暂时等待后续合并;
6 8 7 9 0 1 3 2 4 5 \ / \ / \ / \ / \ / 68 79 01 23 45 \ / \ / | 6789 0123 45
-
-
最终合并
-
然后将6,7,8,96,7,8,96,7,8,9和0,1,2,30,1,2,30,1,2,3合并,从两个子序列的第一个元素开始比较,0最小先放入临时数组,接着1、2、3、6、7、8、9依次放入,得到0,1,2,3,6,7,8,90,1,2,3,6,7,8,90,1,2,3,6,7,8,9;
6 8 7 9 0 1 3 2 4 5 \ / \ / \ / \ / \ / 68 79 01 23 45 \ / \ / | 6789 0123 45 \ / | 01236789 45 -
最后将这个长度为8的有序序列与4,54,54,5合并,4和5比前面序列的前几个元素大,所以在合适的位置插入,最终得到完全有序的序列0,1,2,3,4,5,6,7,8,90,1,2,3,4,5,6,7,8,90,1,2,3,4,5,6,7,8,9;
6 8 7 9 0 1 3 2 4 5 \ / \ / \ / \ / \ / 68 79 01 23 45 \ / \ / | 6789 0123 45 \ / / \ / / \ / / \______/ / 01236789 / \ / \________/ 0123456789
-
-
6.8 基数排序
-
基数排序的基本思想是按组成关键字的各个数位的值进行排序,它属于分配排序的一种,并且是一种稳定的排序方法;
-
时间复杂度 :为 O(d(n+r))O(d(n + r))O(d(n+r)),其中 nnn 是待排元素的个数,ddd 是关键字的位数,rrr 是进制基数(比如十进制中 r=10r = 10r=10)。这是因为需要对每个数位进行排序,每个数位的排序操作涉及 nnn 个元素的分配等操作,共 ddd 个数位,所以时间复杂度与 ddd、nnn、rrr 相关;
-
空间复杂度 :为 O(rd)O(rd)O(rd),需要额外的空间来存储各个数位排序过程中的中间数据等;
-
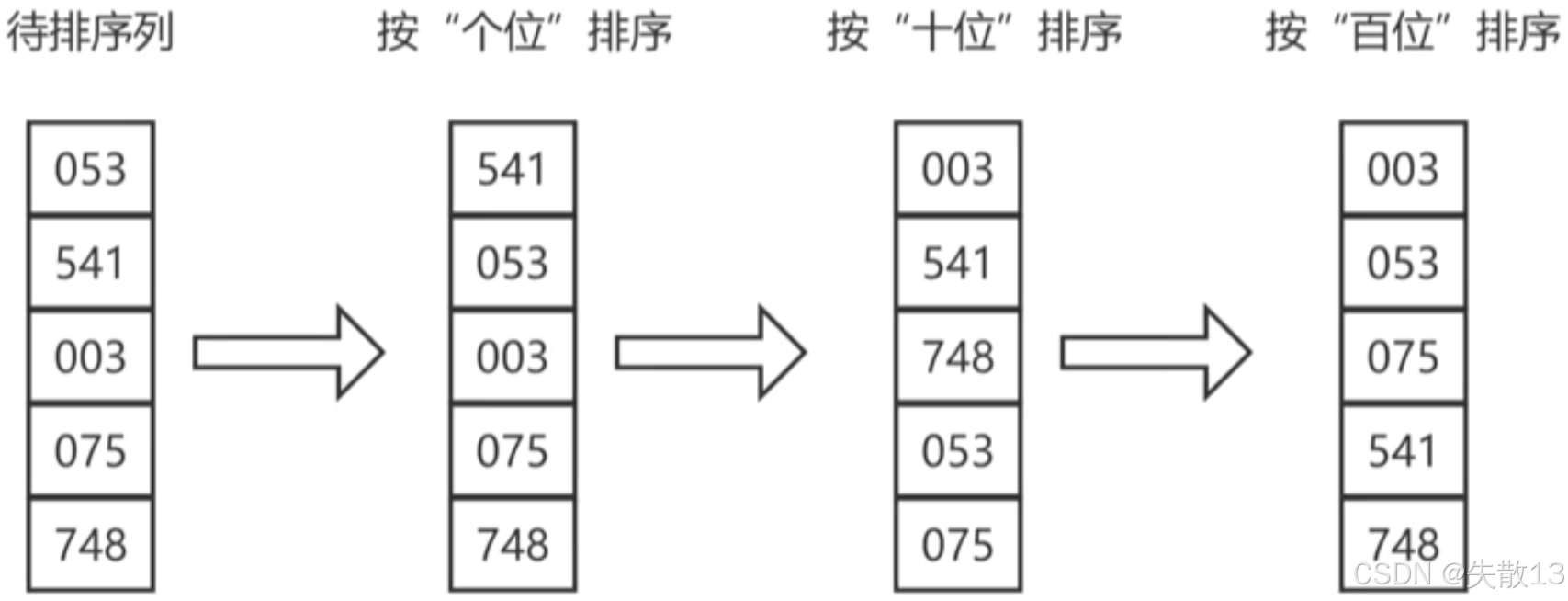
例:待排序列为053、541、003、075、748
-
按"个位"排序:取出每个数的个位数字,分别是3(053)、1(541)、3(003)、5(075)、8(748)。根据个位数字的大小对原数进行排序,得到541(个位1)、053(个位3)、003(个位3)、075(个位5)、748(个位8);
-
按"十位"排序:在按个位排序后的序列基础上,取出每个数的十位数字,分别是4(541)、5(053)、0(003)、7(075)、4(748)。根据十位数字的大小对序列进行排序,得到003(十位0)、541(十位4)、748(十位4)、053(十位5)、075(十位7);
-
按"百位"排序:在按十位排序后的序列基础上,取出每个数的百位数字,分别是0(003)、0(541)、0(748)、0(053)、0(075)。因为百位数字都为0,所以序列顺序保持按十位排序后的结果,最终得到有序序列003、053、075、541、748;
-
6.9 小结
| 排序方法 | 时间复杂度 | 空间复杂度 | 稳定性 |
|---|---|---|---|
| 直接插入排序 | O(n2)O(n^2)O(n2) | O(1)O(1)O(1) | 稳定 |
| 简单选择排序 | O(n2)O(n^2)O(n2) | O(1)O(1)O(1) | 不稳定 |
| 冒泡排序 | O(n2)O(n^2)O(n2) | O(1)O(1)O(1) | 稳定 |
| 希尔排序 | O(n1.3)O(n^{1.3})O(n1.3) | O(1)O(1)O(1) | 不稳定 |
| 快速排序 | O(nlog2n)O(n\log_2 n)O(nlog2n) | O(log2n)O(\log_2 n)O(log2n) | 不稳定 |
| 堆排序 | O(nlog2n)O(n\log_2 n)O(nlog2n) | O(1)O(1)O(1) | 不稳定 |
| 归并排序 | O(nlog2n)O(n\log_2 n)O(nlog2n) | O(n)O(n)O(n) | 稳定 |
| 基数排序 | O(d(n+r))O(d(n + r))O(d(n+r)) | O(rd)O(rd)O(rd) | 稳定 |