基于物理信息神经网络(PINN)求解二维稳态对流-扩散方程的MATLAB实现。以下是对代码的全面分析:
一、主要功能
- 方程求解:求解二维稳态对流-扩散方程:U·∂C/∂x + V·∂C/∂y = D·(∂²C/∂x² + ∂²C/∂y²)
- 多源数据融合:同时利用边界条件、测量数据和物理方程约束
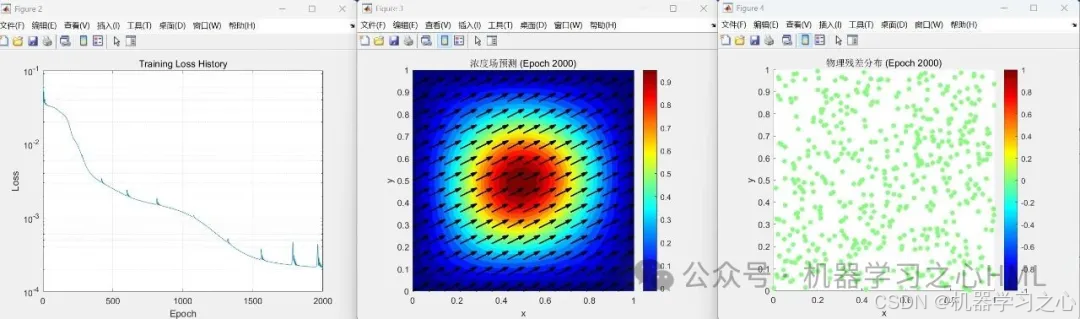
- 浓度场预测:预测整个计算域内的浓度分布
- 物理一致性验证:监控物理残差以确保解满足控制方程
二、逻辑关联
参数设置 → 数据生成 → 网络构建 → 训练循环 → 结果可视化
↓ ↓ ↓ ↓ ↓
物理参数 边界/测量/ 神经网络 损失计算 浓度场+
配置点生成 架构定义 梯度更新 残差图数据流:
- 边界数据:强制满足边界条件
- 测量数据:提供真实观测值(含噪声)
- 配置点:通过物理残差约束内部区域
- 网络输出:预测整个区域的浓度场
三、算法步骤
阶段1:数据准备
- 生成边界条件点(四边均匀分布)
- 生成测量数据点(随机分布+高斯分布真实解+噪声)
- 生成配置点(内部随机点,用于物理约束)
阶段2:网络构建
- 创建4层全连接神经网络(每层32神经元)
- 使用tanh激活函数
- 单输出节点(浓度值)
阶段3:训练过程
- 前向传播计算预测值
- 自动微分计算浓度梯度(一阶和二阶)
- 计算数据损失(边界+测量)和物理残差损失
- Adam优化器更新网络参数
- 定期可视化训练进度
阶段4:结果分析
- 绘制预测浓度场
- 可视化物理残差分布
- 显示流场方向
四、技术路线
| 技术组件 | 实现方法 |
|---|---|
| 神经网络 | 多层感知机 + tanh激活 |
| 物理嵌入 | 自动微分计算PDE残差 |
| 优化算法 | Adam优化器 |
| 自动微分 | dlgradient高阶导数 |
| 数据加权 | 不同类型点赋予不同权重 |
| 可视化 | 实时训练监控 |
五、公式原理
控制方程(稳态对流-扩散):
U ∂ C ∂ x + V ∂ C ∂ y = D ( ∂ 2 C ∂ x 2 + ∂ 2 C ∂ y 2 ) U \frac{\partial C}{\partial x} + V \frac{\partial C}{\partial y} = D \left( \frac{\partial^2 C}{\partial x^2} + \frac{\partial^2 C}{\partial y^2} \right) U∂x∂C+V∂y∂C=D(∂x2∂2C+∂y2∂2C)
损失函数组成:
L = L data + L phys \mathcal{L} = \mathcal{L}{\text{data}} + \mathcal{L}{\text{phys}} L=Ldata+Lphys
数据损失 :
L data = 1 N ∑ i = 1 N w i ( C pred i − C true i ) 2 \mathcal{L}{\text{data}} = \frac{1}{N} \sum{i=1}^{N} w_i (C_{\text{pred}}^i - C_{\text{true}}^i)^2 Ldata=N1i=1∑Nwi(Cpredi−Ctruei)2
物理残差损失 :
L phys = 1 M ∑ j = 1 M w j U ∂ C ∂ x + V ∂ C ∂ y − D ( ∂ 2 C ∂ x 2 + ∂ 2 C ∂ y 2 ) 2 \mathcal{L}{\text{phys}} = \frac{1}{M} \sum{j=1}^{M} w_j \left U\\frac{\\partial C}{\\partial x} + V\\frac{\\partial C}{\\partial y} - D\\left( \\frac{\\partial\^2 C}{\\partial x\^2} + \\frac{\\partial\^2 C}{\\partial y\^2} \\right) \\right^2 Lphys=M1j=1∑MwjU∂x∂C+V∂y∂C−D(∂x2∂2C+∂y2∂2C)2
六、参数设定
物理参数:
| 参数 | 值 | 含义 |
|---|---|---|
| U | 1.0 | x方向对流速度 |
| V | 0.5 | y方向对流速度 |
| D | 0.1 | 扩散系数 |
网络参数:
| 参数 | 值 | 含义 |
|---|---|---|
| numLayers | 4 | 隐藏层数量 |
| numNeurons | 32 | 每层神经元数 |
| 激活函数 | tanh | 非线性变换 |
训练参数:
| 参数 | 值 | 含义 |
|---|---|---|
| numEpochs | 2000 | 训练轮数 |
| learningRate | 0.001 | 学习率 |
| physWeight | 1.0 | 物理损失权重 |
| dataWeight | 1.0 | 数据损失权重 |
采样参数:
| 参数 | 值 | 含义 |
|---|---|---|
| numBCPoints | 100 | 边界条件点数 |
| numDataPoints | 50 | 测量数据点数 |
| numCollPoints | 1000 | 配置点数 |
七、运行环境
软件要求:
- MATLAB(推荐R2024b或更新版本)
- 必要工具箱 :
- Deep Learning Toolbox
- 支持自动微分和
dlnetwork的版本
计算特性:
- 自动微分:使用MATLAB的dlgradient计算高阶导数
- 批量训练:一次性处理所有训练点
- 实时可视化:训练过程中动态更新结果
八、应用场景
环境工程:
- 大气污染物扩散模拟
- 水体中污染物输运预测
工业应用:
- 化学反应器内物质分布
- 通风系统中空气污染物传播
科学研究:
- 多物理场耦合问题研究
- 逆向参数识别问题
总结
该代码实现了一个完整的PINN框架用于稳态对流-扩散问题,具有以下特点:
- 多源信息融合:巧妙结合边界条件、测量数据和物理方程
- 物理一致性:通过残差损失确保解满足控制方程
- 鲁棒性:能够处理带噪声的测量数据
- 可视化完善:提供训练过程监控和结果分析
- 模块化设计:清晰的函数分离便于修改和扩展
这种方法特别适合数据稀缺但物理规律明确的工程问题,为传统数值方法提供了有力的补充。