目录
[1 作用](#1 作用)
[2 参数及含义说明](#2 参数及含义说明)
[3 代码逻辑](#3 代码逻辑)
[4 代码](#4 代码)
[5 代码解析](#5 代码解析)
[5.1 检查是否有初始化器](#5.1 检查是否有初始化器)
[5.1.1 随机采样一致性算法:RANdom SAmple Consensus(RANSAC)](#5.1.1 随机采样一致性算法:RANdom SAmple Consensus(RANSAC))
[5.2 初始化](#5.2 初始化)
[5.3 当前帧和参考帧中找匹配点](#5.3 当前帧和参考帧中找匹配点)
[5.3.1 最近邻比值阈值(nnratio)](#5.3.1 最近邻比值阈值(nnratio))
[5.3.2 参数说明](#5.3.2 参数说明)
[5.4 调用初始化器估计R、t,三角化](#5.4 调用初始化器估计R、t,三角化)
[5.5 设置位姿、建立初始化地图](#5.5 设置位姿、建立初始化地图)
1 作用
单目相机初始化:
(1)找到合适的两帧(参考帧 + 当前帧)、估计相机的初始运动(R, t);
(2)三角化生成第一批 3D 地图点;
(3)构建初始地图。
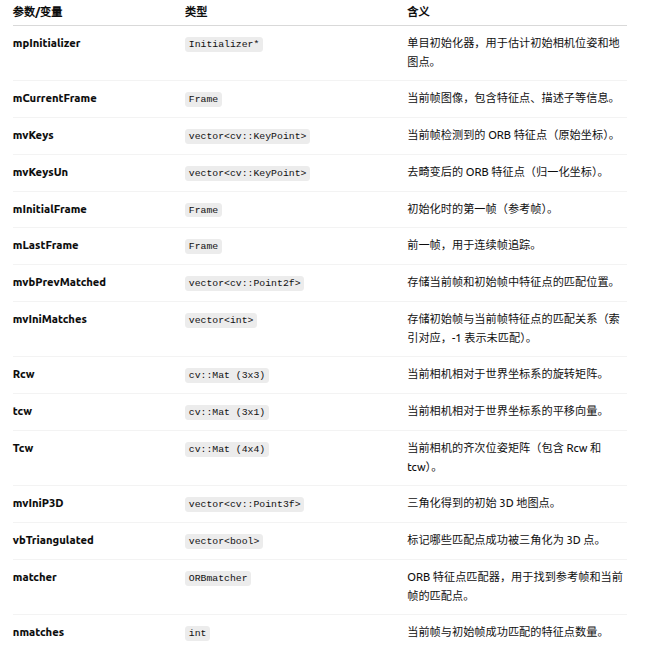
2 参数及含义说明
3 代码逻辑
(1)第一次检测到足够特征点(>100) → 保存为
mInitialFrame,并构造初始化器Initializer。(2)后续帧进入初始化阶段
用
ORBmatcher在mInitialFrame和mCurrentFrame之间找匹配点。如果匹配数不足 100 → 初始化失败,清空。
如果匹配足够 → 用
Initializer->Initialize()估计Rcw和tcw,并三角化得到初始 3D 点。设置初始帧和当前帧的位姿,调用
CreateInitialMapMonocular()建图。
4 代码
cppvoid Tracking::MonocularInitialization() { if(!mpInitializer) { // Set Reference Frame if(mCurrentFrame.mvKeys.size()>100) { mInitialFrame = Frame(mCurrentFrame); mLastFrame = Frame(mCurrentFrame); mvbPrevMatched.resize(mCurrentFrame.mvKeysUn.size()); for(size_t i=0; i<mCurrentFrame.mvKeysUn.size(); i++) mvbPrevMatched[i]=mCurrentFrame.mvKeysUn[i].pt; if(mpInitializer) delete mpInitializer; mpInitializer = new Initializer(mCurrentFrame,1.0,200); fill(mvIniMatches.begin(),mvIniMatches.end(),-1); return; } } else { // Try to initialize if((int)mCurrentFrame.mvKeys.size()<=100) { delete mpInitializer; mpInitializer = static_cast<Initializer*>(NULL); fill(mvIniMatches.begin(),mvIniMatches.end(),-1); return; } // Find correspondences ORBmatcher matcher(0.9,true); int nmatches = matcher.SearchForInitialization(mInitialFrame,mCurrentFrame,mvbPrevMatched,mvIniMatches,100); // Check if there are enough correspondences if(nmatches<100) { delete mpInitializer; mpInitializer = static_cast<Initializer*>(NULL); return; } cv::Mat Rcw; // Current Camera Rotation cv::Mat tcw; // Current Camera Translation vector<bool> vbTriangulated; // Triangulated Correspondences (mvIniMatches) if(mpInitializer->Initialize(mCurrentFrame, mvIniMatches, Rcw, tcw, mvIniP3D, vbTriangulated)) { for(size_t i=0, iend=mvIniMatches.size(); i<iend;i++) { if(mvIniMatches[i]>=0 && !vbTriangulated[i]) { mvIniMatches[i]=-1; nmatches--; } } // Set Frame Poses mInitialFrame.SetPose(cv::Mat::eye(4,4,CV_32F)); cv::Mat Tcw = cv::Mat::eye(4,4,CV_32F); Rcw.copyTo(Tcw.rowRange(0,3).colRange(0,3)); tcw.copyTo(Tcw.rowRange(0,3).col(3)); mCurrentFrame.SetPose(Tcw); CreateInitialMapMonocular(); } } }
5 代码解析
5.1 检查是否有初始化器
cppif(!mpInitializer) { // Set Reference Frame if(mCurrentFrame.mvKeys.size()>100) { mInitialFrame = Frame(mCurrentFrame); mLastFrame = Frame(mCurrentFrame); //分配存储空间,另mvbPrevMatched空间大小等于当前帧去畸变后的特征点数量 mvbPrevMatched.resize(mCurrentFrame.mvKeysUn.size()); for(size_t i=0; i<mCurrentFrame.mvKeysUn.size(); i++) //.pt二维像素坐标,将当前帧归一化去畸变后的像素坐标存储在mvbPrevMatched mvbPrevMatched[i]=mCurrentFrame.mvKeysUn[i].pt; if(mpInitializer) delete mpInitializer; //RANSAC 的噪声阈值 (1.0 像素) ,迭代次数 (200) mpInitializer = new Initializer(mCurrentFrame,1.0,200); //将mvIniMatches中所有元素全部置为-1 fill(mvIniMatches.begin(),mvIniMatches.end(),-1); return; } }
5.1.1 随机采样一致性算法:RANdom SAmple Consensus(RANSAC)
(1)作用
从数据里"挖出"一组可靠的内点(inliers),用它们来拟合正确的模型,并自动剔除外点。
(2)原理
求解对极几何E矩阵为例:
随机采样,
从匹配点集中随机选取最小数量的点(比如 8 点法 → 取 8 对点);
拟合模型,
用这组点计算一个候选的E矩阵;
验证一致性,
用这个E矩阵检查所有匹配点,看有多少点满足约束(误差 < 阈值)。符合约束的点称为内点 ;
记录最佳结果,
如果内点数比之前的最好结果还多 → 更新最佳模型;
迭代多次,
重复 1~4(比如 200 次),最终选出包含最多内点的模型。
5.2 初始化
cppelse { // Try to initialize if((int)mCurrentFrame.mvKeys.size()<=100) { delete mpInitializer; mpInitializer = static_cast<Initializer*>(NULL); fill(mvIniMatches.begin(),mvIniMatches.end(),-1); return; }5.1、5.2综合起来看,如果没有初始化器则找到一帧特征点大于100的作为初始化器的建立,如果有初始化器但当前帧特征点数小于100,则删除重新找。
5.3 当前帧和参考帧中找匹配点
cpp// Find correspondences //根据ORB描述子在两帧图像之间寻找对应点,最近邻比值阈值0.9,检查特征点方向是否一致 ORBmatcher matcher(0.9,true); int nmatches = matcher.SearchForInitialization(mInitialFrame,mCurrentFrame,mvbPrevMatched,mvIniMatches,100); // Check if there are enough correspondences if(nmatches<100) { delete mpInitializer; mpInitializer = static_cast<Initializer*>(NULL); return; }
5.3.1 最近邻比值阈值(nnratio)
(1)对一个特征点找出在另一帧中的最近邻(距离 d1)和次近邻(距离 d2),该距离即汉明距离(Hamming Distance);
(2)如果
d1 < nnratio * d2,就认为匹配有效。
5.3.2 参数说明
(1)mInitialFrame
参考帧,保存了参考帧的关键点、ORB描述子
(2)mCurrentFrame
当前帧,要和参考帧匹配
(3)mvbPrevMatched
参考帧中特征点在上一帧的位置,初始化时将当前帧的关键点位置给mvbPrevMatched,连续跟踪mvbPrevMatched是参考帧的关键点在当前帧中的预测位置,由运动模型计算。
(4)mvIniMatches
参考帧在当前帧中的匹配情况
(5)100
匹配的范围,在附近 100 像素范围内搜索可能的匹配点
PS.SearchForInitialization() 函数详见:
5.4 调用初始化器估计R、t,三角化
cppcv::Mat Rcw; // Current Camera Rotation cv::Mat tcw; // Current Camera Translation vector<bool> vbTriangulated; // Triangulated Correspondences (mvIniMatches) //用参考帧 + 当前帧 → 估计相机运动(R,t)并恢复初始 3D 点云 if(mpInitializer->Initialize(mCurrentFrame, mvIniMatches, Rcw, tcw, mvIniP3D, vbTriangulated)) { for(size_t i=0, iend=mvIniMatches.size(); i<iend;i++) { if(mvIniMatches[i]>=0 && !vbTriangulated[i]) { mvIniMatches[i]=-1; nmatches--; } }PS.Initialize() 函数详见:
5.5 设置位姿、建立初始化地图
cpp// Set Frame Poses mInitialFrame.SetPose(cv::Mat::eye(4,4,CV_32F)); cv::Mat Tcw = cv::Mat::eye(4,4,CV_32F); Rcw.copyTo(Tcw.rowRange(0,3).colRange(0,3)); tcw.copyTo(Tcw.rowRange(0,3).col(3)); mCurrentFrame.SetPose(Tcw); CreateInitialMapMonocular(); } }CreateInitialMapMonocular() 函数详见: