文章目录
一、Autodl租云服务器
博主镜像环境如下

也可直接使用别人创建好的镜像,参考基于AutoDL平台的3D_Gaussian_Splatting初体验
(博主为了练一下复现的能力就自己复现了,下述步骤算是比较简单了,应该可以一次成功)
二、环境部署
- 初始化
base环境
conda init初始化base环境,执行完成后重新打开终端 - 克隆项目
cd autodl-tmpgit clone https://github.com/graphdeco-inria/gaussian-splatting.git --recursive
建议这步先开代理(source /etc/network_turbo)再clone
- 安装
mamba(兼容conda,但比conda快)
conda install -n base -c conda-forge mamba
如果出现ProxyError: Conda cannot proceed due to an error in your proxy configuration.错误,则表明是代理的问题,使用unset http_proxy && unset https_proxy这个命令关闭第2步中开启的代理,然后重新安装mamba。 - 根据项目中环境
yml文件创建虚拟环境
cd gaussian-splattingmamba env create --file environment.yml -y
这个过程可能出现Killed(由于博主上述前3步使用的是无卡模式(省钱),如果出现Killed说明无卡模式内存太小了,无法支撑环境创建,关机后重新开机(不使用无卡模式),然后cd autodl-tmp/gaussian-splatting,重新执行mamba env create --file environment.yml -y)
出现下述信息是正常的,如果不放心可以pip list一下检查一下包是否都安装上了
bash
Installing pip packages: submodules/diff-gaussian-rasterization, submodules/simple-knn, submodules/fused-ssim, opencv-python, joblib
WARNING: Running pip as the 'root' user can result in broken permissions and conflicting behaviour with the system package manager. It is recommended to use a virtual environment instead: https://pip.pypa.io/warnings/venv三、训练
参考基于AutoDL平台的3D_Gaussian_Splatting初体验
下载官方数据集https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/,进入后点击
Scenes-650MB下载数据集,里面有两个文件夹db和tandt,其中tandt中有两个场景train和truck,使用这两个文件夹作为数据集即可。我参考上述文章,将数据文件放在了
data文件夹下,然后使用Xftp 8传到了服务器上(软件使用可参考基于AutoDL平台的3D_Gaussian_Splatting初体验,这里不赘述了)
使用下述命令训练-s后面为数据集输入路径、-m后面为结果输出路径,可以根据自己放置的位置灵活修改,下面以训练train为例:
bash
python train.py -s data/train/ -m data/train/output训练开始:

训练完成:

四、结果可视化查看
参考基于AutoDL平台的3D_Gaussian_Splatting初体验
下载官方提供的https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/binaries/viewers.zip可视化工具
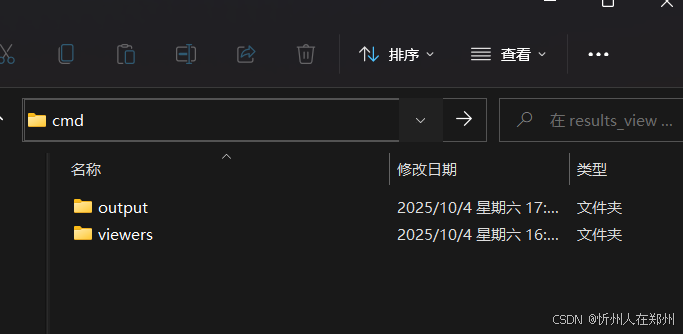
- 将训练后的
data/train/output路径的output文件夹传到本地电脑,我是放在了D:\3DGS\results_view\output这里,可以自由定义,然后将下载后的viewers解压到results_view下(注意这时候解压的时候可能是将viewers里面的文件都解压出来了,这时候需要在results_view下创建viewers文件夹,然后存放解压后的内容在viewers下,如果正常解压则不用管这步)最后,文件结构是下述这样即可(保证output文件夹和viewers文件夹在同一目录下)。
- 查看重建效果
- 在
D:\3DGS\results_view下打开终端
具体操作
- 如图点击路径位置
- 在1步骤中位置输入
cmd
- 按回车键
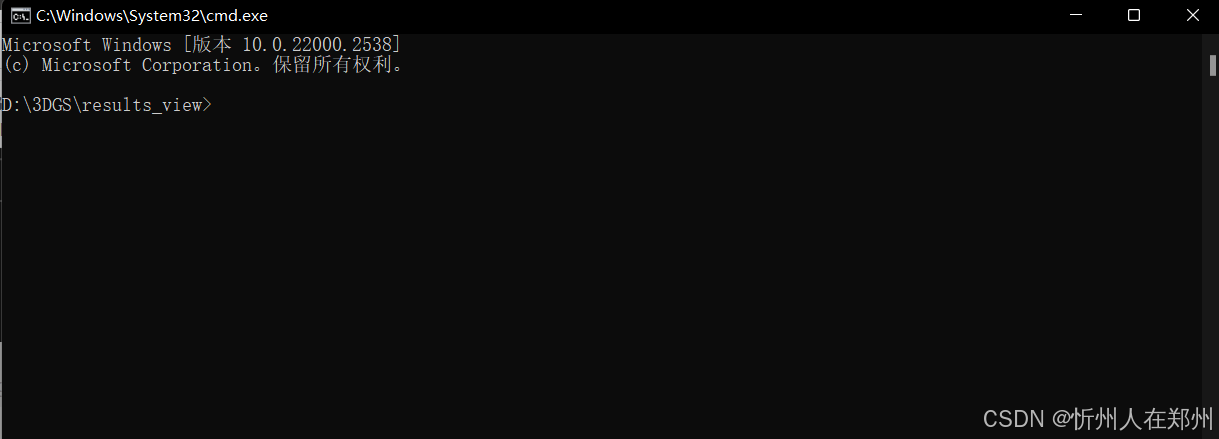
- 命令行输入
.\viewers\bin\SIBR_gaussianViewer_app -m results_view/output(其中-m后面是指定的output的路径,可以根据自己存放的位置自由修改)【这步是参考基于AutoDL平台的3D_Gaussian_Splatting初体验这个文章的,但是博主遇到了错误,具体看下面】 - 上一步可能遇到的错误
如果报错,而且没有成功打开可视化软件(或者一闪而过)
bash
D:\3DGS\results_view>.\viewers\bin\SIBR_gaussianViewer_app -m results_view/output
[SIBR] -- INFOS --: Initialization of GLFW
[SIBR] -- INFOS --: OpenGL Version: 4.6.0 NVIDIA 546.30[major: 4, minor: 6]可能是没有用管理员身份运行,重新用管理员身份运行进入对应目录
如果要从C盘切换到D盘路径:使用
D:然后cd到results_view文件夹下
如果报错找不到文件(先检查是否在对应文件夹下有对应文件,如果存不存在则重新生成,如果存在则将命令改为
bash
.\viewers\bin\SIBR_gaussianViewer_app -m D:\3DGS\results_view\output即最后一部分使用绝对路径),如下信息:
bash
D:\3DGS\results_view>.\viewers\bin\SIBR_gaussianViewer_app -m results_view/output
[SIBR] -- INFOS --: Initialization of GLFW
[SIBR] -- INFOS --: OpenGL Version: 4.6.0 NVIDIA 546.30[major: 4, minor: 6]
[SIBR] ## ERROR ##: FILE C:\Users\alanvin.AD\Repos\Github\3dgs\SIBR_viewers\src\projects\gaussianviewer\apps\gaussianViewer\main.cpp
LINE 140, FUNC main
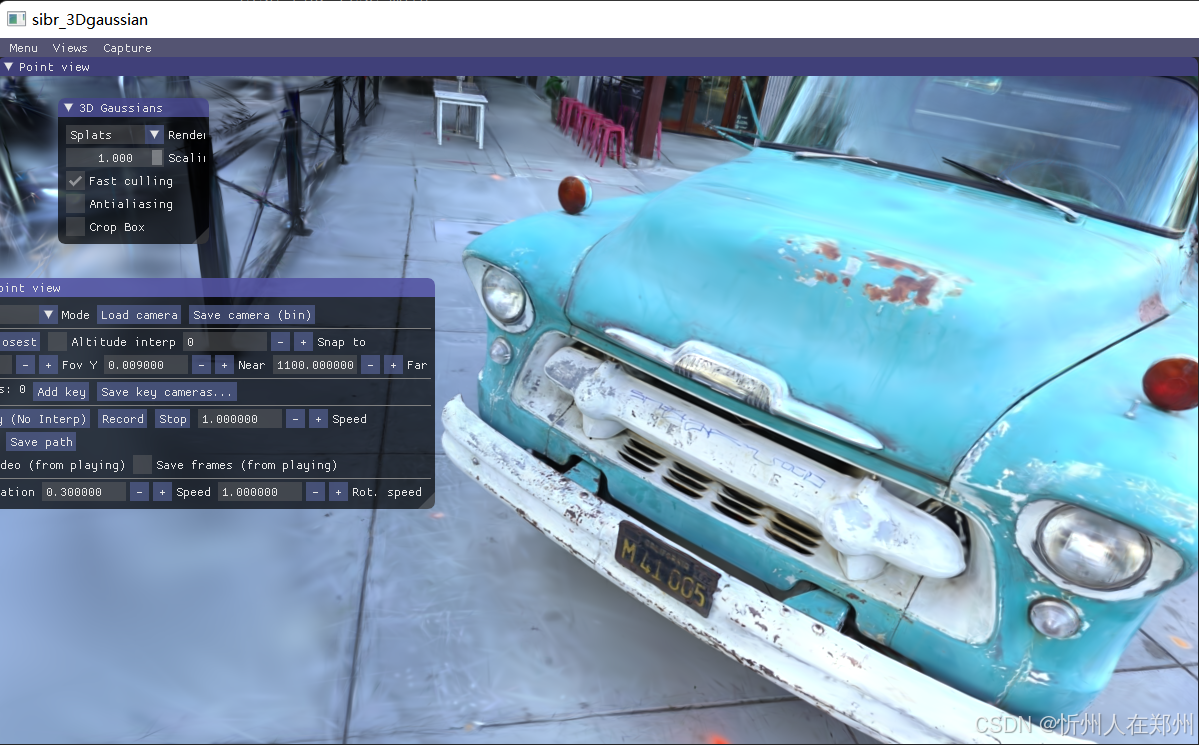
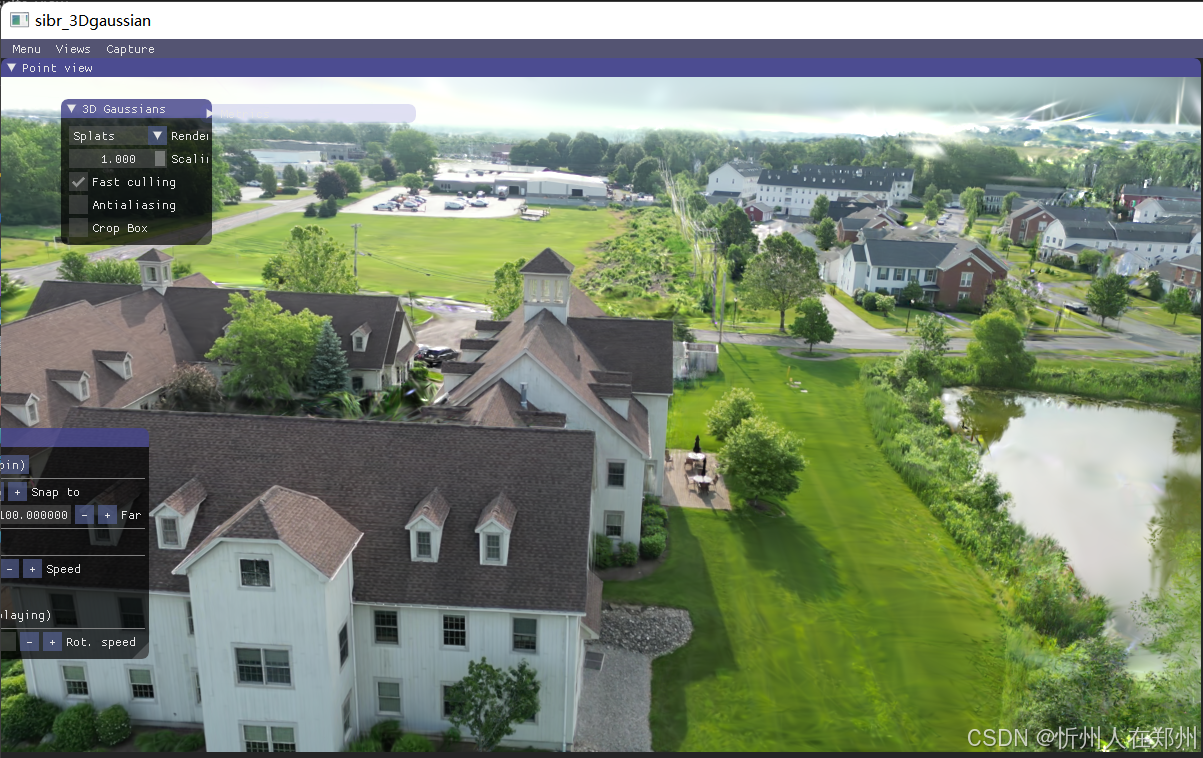
Could not find config file 'cfg_args' at results_view/output- 解决完上述步骤,应该可以看到重建结果,如下图所示。
可以使用
w,a,s,d,q,e来进行位置移动,u,i,o,j,k,l来进行视角的移动。

五、自定义数据集处理和训练
需要安装colmap
- 使用
mamba install -c conda-forge colmap -y安装colmap - 使用
colmap -h检查是否安装成功(若输出版本信息等则说明成功,如3.8版本,使用mamba安装的一般都是3.8的colmap) - 以图片数据集为例,参考
三、训练章节及项目readme
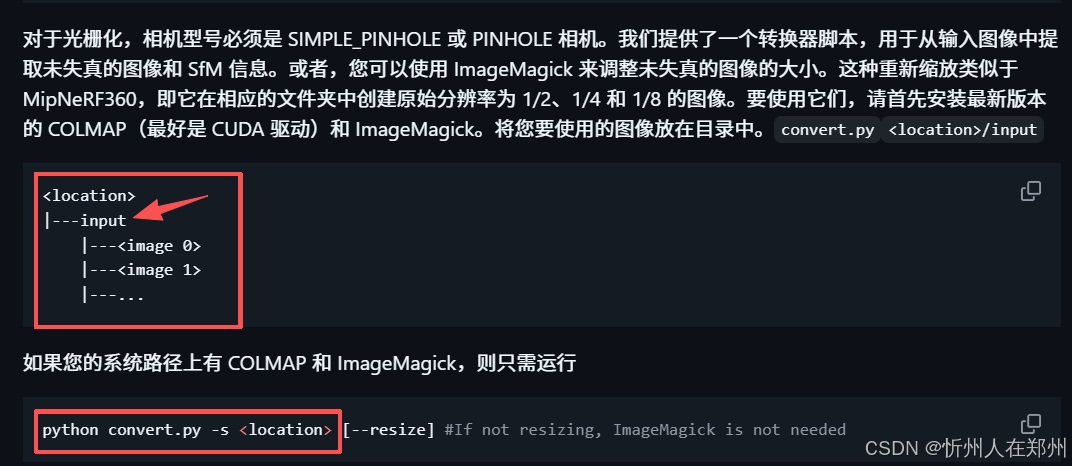
将图片数据放在data文件夹下(我在data/test/input(注意,必须 是input下)下放置了我自定义的图片数据,没有处理数据前没有distorted文件夹,我是处理完的(即执行完下述命令后的结构))
- 运行下述命令
bash
python convert.py -s data/test好像运行上述脚本后会新创建一个images文件夹存放图片
- 然后就可以开始训练了,执行下述命令
bash
python train.py -s data/test/ -m data/test/output-
成功开始训练

-
训练结束

-
可视化查看(和上述章节步骤类似,不赘述)
References