目录
[1. rho(距离分辨率)](#1. rho(距离分辨率))
[2. theta(角度分辨率)](#2. theta(角度分辨率))
[3. threshold(投票阈值)](#3. threshold(投票阈值))
[4. minLineLength(最小直线长度)](#4. minLineLength(最小直线长度))
[5. maxLineGap(最大线段间隙)](#5. maxLineGap(最大线段间隙))
一、引言
在【计算机视觉】霍夫变换检测-CSDN博客中,有人问道:"霍夫变换中,如何根据不同的应用场景调整HoughLinesP函数的参数rho、theta、threshold、minLineLength和maxLineGap以优化直线检测效果?"是的,在霍夫变换(cv2.HoughLinesP)中,参数的调整需要结合具体应用场景的需求(如直线的粗细、连续性、噪声情况、检测精度要求等)。本文将要介绍霍夫变换函数中各参数的含义及针对不同场景的调整策略以及Python代码完整实现。
本文用到的图片样例:

二、霍夫变换函数中各参数的含义及针对不同场景的调整策略
1. rho(距离分辨率)
- 含义:霍夫空间中极坐标的距离步长(单位:像素),表示检测直线时允许的距离误差粒度。
- 调整原则 :
- 小
rho(如 1-2 像素):距离精度高,能检测更细的直线(如细线、边缘清晰的直线),但计算量更大(霍夫空间网格更密)。适用场景:高精度检测(如工业零件的直线边缘、清晰的车道线)。 - 大
rho(如 5-10 像素):距离精度低,计算速度快,但可能合并邻近的直线或错过细直线。适用场景:实时性要求高(如视频流处理)、直线较粗或允许一定误差的场景。
- 小
2. theta(角度分辨率)
- 含义:霍夫空间中极坐标的角度步长(单位:弧度),表示检测直线时允许的角度误差粒度。
- 调整原则 :
- 小
theta(如np.pi/180,即 1°):角度精度高,能区分角度接近的直线(如夹角很小的交叉线),但计算量更大。适用场景:需要精确角度的场景(如建筑图纸的直线检测、机械零件的角度测量)。 - 大
theta(如np.pi/90,即 2°):角度精度低,计算速度快,但可能将角度接近的直线合并为一条。适用场景:对角度精度要求不高(如道路边缘检测,直线多为水平 / 垂直 / 45° 等)、实时性优先的场景。
- 小
3. threshold(投票阈值)
- 含义:霍夫空间中,一条直线需要被多少个像素点 "投票"(即映射到同一直线参数)才能被认为是 "有效直线"。
- 调整原则 :
- 低阈值(如 10-30):检测到的直线更多(包括弱边缘或噪声形成的短线),但容易引入噪声直线。适用场景:背景简单、直线边缘清晰但像素较少(如浅色直线在深色背景上)。
- 高阈值(如 50-100):仅保留被大量像素支持的强直线,过滤噪声,但可能漏检弱直线。适用场景:背景复杂(如包含大量纹理噪声)、直线边缘明显(如粗直线、高对比度直线)。
4. minLineLength(最小直线长度)
- 含义:被认为是 "有效直线" 的最小像素数量(即直线上至少包含的像素点)。
- 调整原则 :
- 小值(如 10-50 像素):保留短直线,适合检测破碎的直线(如被遮挡的车道线、断裂的边缘)。适用场景:直线存在断裂(如道路上的虚线车道线、被物体遮挡的直线)。
- 大值(如 100-200 像素):过滤短线段,只保留长直线,减少噪声干扰。适用场景:直线连续且较长(如高速公路的实线车道线、建筑的长边)。
5. maxLineGap(最大线段间隙)
- 含义:同一条直线上允许的最大像素间隔(即两段线段若间隔小于该值,会被合并为一条直线)。
- 调整原则 :
- 小值(如 10-30 像素):仅合并间隙很小的线段,适合检测连续无断裂的直线(如光滑的边缘)。适用场景:直线完整无遮挡(如清晰的墙壁边缘、未被干扰的直线)。
- 大值(如 50-100 像素):可以合并间隙较大的线段,适合直线存在断裂或遮挡的场景。适用场景:直线有明显断裂(如被雨水、阴影遮挡的车道线、有缺口的零件边缘)。
总结:不同场景的参数调整示例
-
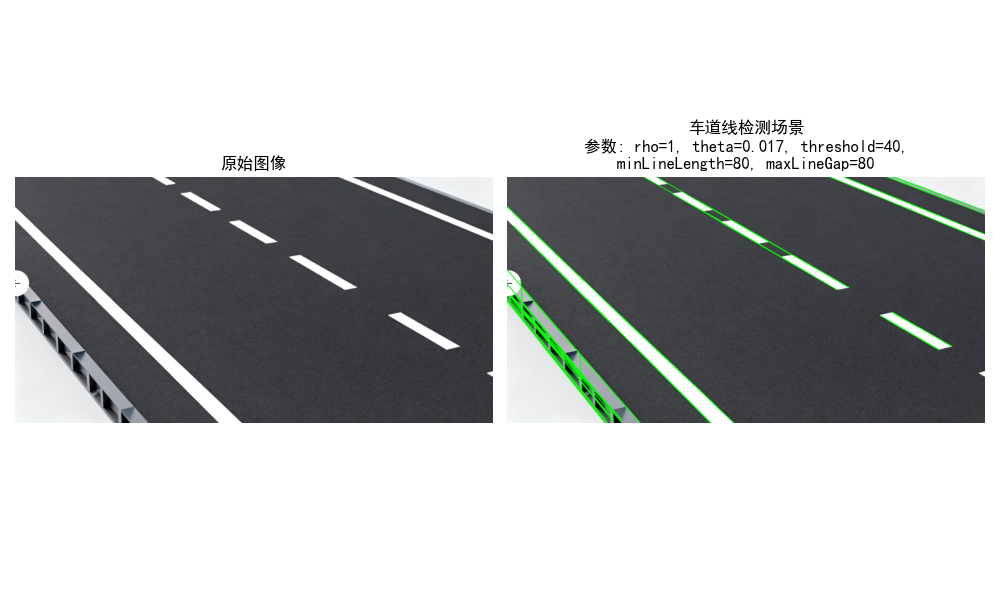
车道线检测(如用户代码场景) :车道线可能存在断裂(被遮挡)、需要保留长线段、过滤路面噪声。推荐参数:
rho=1(高精度)、theta=np.pi/180(精确角度)、threshold=30-50(过滤噪声)、minLineLength=50-100(保留长车道线)、maxLineGap=50-100(合并断裂的车道线)。 -
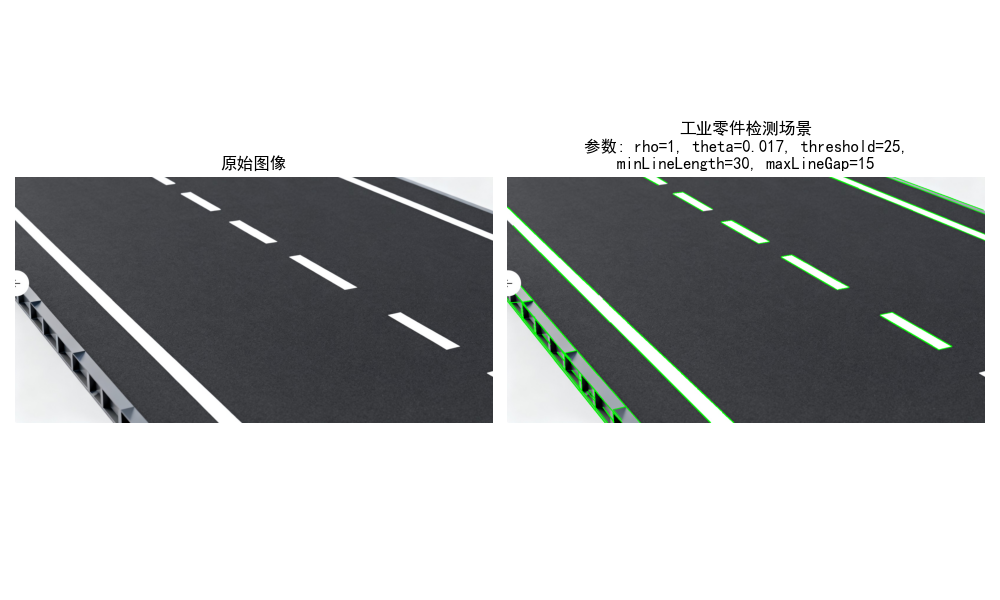
工业零件边缘检测(高精度要求) :需精确检测细小边缘,噪声少但直线可能较短。推荐参数:
rho=1、theta=np.pi/180、threshold=20-30(不遗漏弱边缘)、minLineLength=20-50(保留短边缘)、maxLineGap=10-20(不合并无关线段)。 -
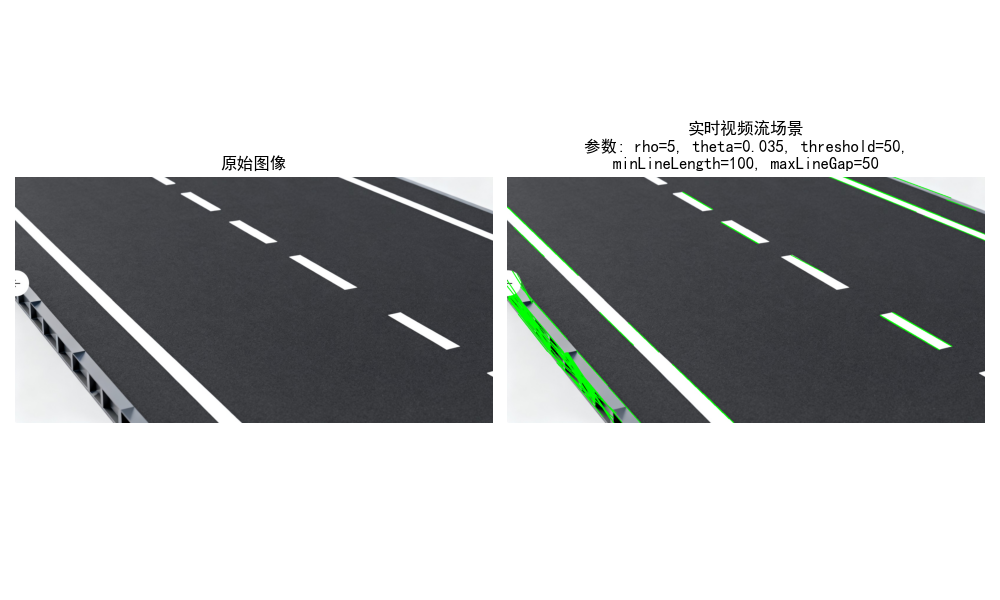
实时视频流直线检测(速度优先) :需快速处理,允许一定精度损失。推荐参数:
rho=5(减少计算量)、theta=np.pi/90(角度精度降低)、threshold=50(过滤噪声)、minLineLength=100(只保留明显长直线)、maxLineGap=50。
通过以上参数的组合调整,可以平衡检测精度、速度和抗噪声能力,适配不同场景的直线检测需求。实际应用中,建议先固定rho和theta,再通过调整threshold过滤噪声,最后用minLineLength和maxLineGap优化直线的连续性。
三、霍夫变换函数的参数调整的Python代码完整实现
python
import numpy as np
import cv2
import matplotlib.pyplot as plt
# 设置中文显示
plt.rcParams["font.sans-serif"] = ["SimHei"]
plt.rcParams["axes.unicode_minus"] = False
def process_image(image_path, params, title):
"""
处理图像并应用霍夫变换
params: (rho, theta, threshold, minLineLength, maxLineGap)
"""
# 读取图像
image = cv2.imread(image_path)
if image is None:
raise ValueError(f"无法读取图像: {image_path}")
# 转换为灰度图
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯模糊
blur = cv2.GaussianBlur(gray, (5, 5), 0)
# Canny边缘检测
edges = cv2.Canny(blur, 50, 150)
# 提取参数
rho, theta, threshold, minLineLength, maxLineGap = params
# 应用霍夫变换
lines = cv2.HoughLinesP(
edges,
rho=rho,
theta=theta,
threshold=threshold,
minLineLength=minLineLength,
maxLineGap=maxLineGap
)
# 绘制检测到的直线
line_image = np.copy(image)
if lines is not None:
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(line_image, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 显示结果
plt.figure(figsize=(10, 6))
plt.subplot(121)
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.title('原始图像')
plt.axis('off')
plt.subplot(122)
plt.imshow(cv2.cvtColor(line_image, cv2.COLOR_BGR2RGB))
plt.title(
f'{title}\n参数: rho={rho}, theta={theta:.3f}, threshold={threshold},\nminLineLength={minLineLength}, maxLineGap={maxLineGap}')
plt.axis('off')
plt.tight_layout()
plt.savefig(f'{title}.png')
plt.show()
if __name__ == "__main__":
# 测试图像路径,请替换为实际图像路径
image_path = "test_lane.jpg" # 可以是车道线或包含直线的图像
# 1. 车道线检测参数设置
lane_params = (
1, # rho: 高精度
np.pi / 180, # theta: 1度精度
40, # threshold: 过滤噪声
80, # minLineLength: 保留长车道线
80 # maxLineGap: 合并断裂的车道线
)
process_image(image_path, lane_params, "车道线检测场景")
# 2. 工业零件边缘检测参数设置
industrial_params = (
1, # rho: 高精度
np.pi / 180, # theta: 1度精度
25, # threshold: 不遗漏弱边缘
30, # minLineLength: 保留短边缘
15 # maxLineGap: 不合并无关线段
)
process_image(image_path, industrial_params, "工业零件检测场景")
# 3. 实时视频流检测参数设置
realtime_params = (
5, # rho: 降低精度,提高速度
np.pi / 90, # theta: 2度精度
50, # threshold: 过滤噪声
100, # minLineLength: 只保留明显长直线
50 # maxLineGap: 适度合并
)
process_image(image_path, realtime_params, "实时视频流场景")四、程序运行截图展示
五、总结
本文详细介绍了霍夫变换(cv2.HoughLinesP)中各参数的含义及调整策略,包括rho(距离分辨率)、theta(角度分辨率)、threshold(投票阈值)、minLineLength(最小直线长度)和maxLineGap(最大线段间隙)。针对不同应用场景(如车道线检测、工业零件边缘检测、实时视频流处理)提供了具体参数设置建议,并通过Python代码实现展示了不同参数组合下的效果。通过合理调整这些参数,可以平衡检测精度、速度和抗噪声能力,满足不同场景的直线检测需求。