简介
颜色检测就是对目标图像的所有像素点进行筛选,将符合指标的像素设置为白色,不符合指标的像素设置为黑色。
一、HSV图像类型介绍
HSV是相对RGB的另一种颜色表示方式,它相对RGB而言,是一种比较直观的颜色模型。其中颜色的参数分别是:色调(H),饱和度(S),明度(V)。
色调H:
用角度度量,取值范围为0°~360°,从红色开始按逆时针方向计算,红色为0°,绿色为120°,蓝色为240°。它们的补色是:黄色为60°,青色为180°,紫色为300°;
饱和度S:
饱和度S表示颜色接近光谱色的程度。一种颜色,可以看成是某种光谱色与白色混合的结果。其中光谱色所占的比例愈大,颜色接近光谱色的程度就愈高,颜色的饱和度也就愈高。饱和度高,颜色则深而艳。光谱色的白光成分为0,饱和度达到最高。通常取值范围为0%~100%,值越大,颜色越饱和。
明度V:
明度表示颜色明亮的程度,对于光源色,明度值与发光体的光亮度有关;对于物体色,此值和物体的透射比或反射比有关,光照对此值影响最大。通常取值范围为0%(黑)到100%(白)。
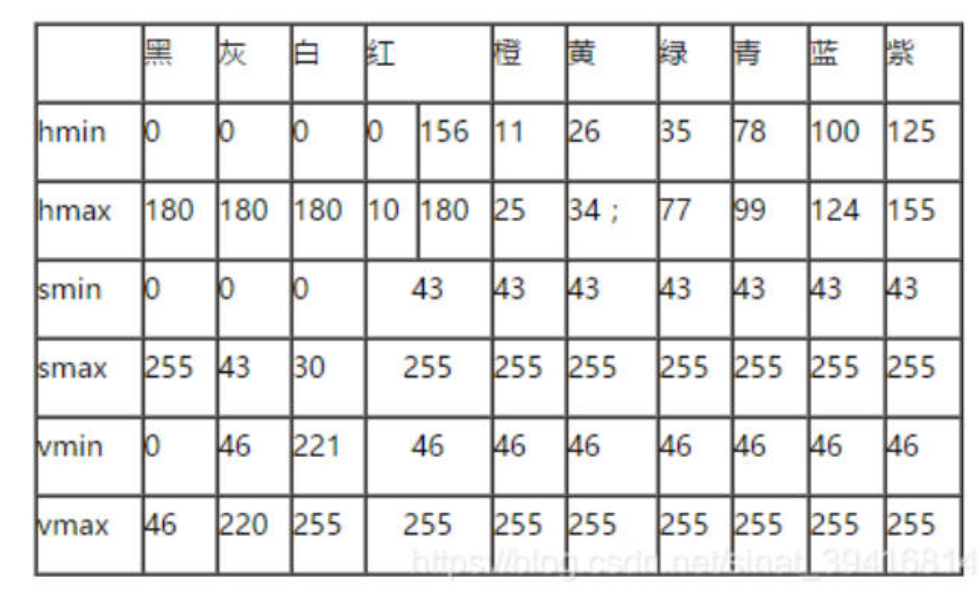
一般对颜色空间的图像进行有效处理都是在HSV空间进行的,然后对于基本色中对应的HSV分量需要给定一个严格的范围,下面是通过实验计算的模糊范围(准确的范围在网上都没有给出)。
- H: 0--- 180
- S: 0--- 255
- V: 0--- 255
选择HSV进行颜色检测的原因
数字图像处理中常用的采用模型是RGB(红,绿,蓝)模型和HSV(色调,饱和度,亮度),RGB广泛应用于彩色监视器和彩色视频摄像机,我们平时的图片一般都是RGB模型。
相对于RGB空间,HSV空间能够非常直观的表达色彩的明暗,色调,以及鲜艳程度,方便进行颜色之间的对比。
所以我们在颜色检测时,选用HSV图像。
二、代码实现
1.颜色识别
从摄像头实时视频中,在画面中央划定一个固定的矩形区域,分析该区域内像素的颜色,并判断它最可能是哪种颜色(红、黄、绿、蓝)。
python
import cv2
def get_color(img):
H = []
color_name = None
img = cv2.resize(img, dsize=(640, 480))
# 将彩色图转成HSV
HSV = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 画矩形框
cv2.rectangle(img, pt1=(280, 180), pt2=(360, 260), color=(0, 255, 0), thickness=2)
# 依次取出每行每列的H
for i in range(280, 360):
for j in range(180, 260): H.append(HSV[j, i][0])
# 分别计算出H
H_min = min(H); H_max = max(H)
# print(H_min,H_max)
# 判断颜色
if H_min >= 0 and H_max <= 10 or H_min >= 156 and H_max <= 180: color_name = 'red'
elif H_min >= 26 and H_max <= 34: color_name = 'yellow'
elif H_min >= 35 and H_max <= 77: color_name = 'green'
elif H_min >= 100 and H_max <= 124: color_name = 'blue'
print(color_name)
return img, color_name
cap = cv2.VideoCapture(0)
while 1:
_, frame = cap.read()
img, cal = get_color(frame)
cv2.imshow('', img)
if cv2.waitKey(1) == 27:
break2.识别指定颜色区域
从摄像头实时视频中,检测出所有属于预定义颜色范围(代码中注释了两种范围,一个是绿色,一个是棕色)的像素,并将其高亮显示,其他颜色则显示为黑色。
python
import cv2
import numpy as np
cap = cv2.VideoCapture(0)
while True:
try:
ret, frame3 = cap.read()
hsv_image = cv2.cvtColor(frame3, cv2.COLOR_BGR2HSV)
# 定义颜色的范围
lower_brown = np.array([35, 43, 46]) # 最小颜色值
upper_brown = np.array([77, 255, 255]) # 最大颜色值
# lower_brown = np.array([10, 30, 30]) # 最小颜色值
# upper_brown = np.array([30, 255, 255]) # 最大颜色值
# 使用颜色范围进行颜色检测 符合条件的像素被设为255(白色),不符合条件的像素被设为0(黑色)
mask = cv2.inRange(hsv_image, lower_brown, upper_brown)
result = cv2.bitwise_and(frame3, frame3, mask=mask)
cv2.imshow('mask', mask)
cv2.imshow('Filtered Image1', frame3)
cv2.imshow('result', result)
if cv2.waitKey(1) == 27:
break
except:
pass
# 释放摄像头资源及关闭窗口
cap.release()
cv2.destroyAllWindows()| 特性 | 代码一 (get_color.py) |
代码二 (color_detection.py) |
|---|---|---|
| 核心目标 | 识别 一个固定区域内的主颜色。 | 检测 并高亮 整个画面中所有符合特定颜色范围的像素。 |
| 颜色分析区域 | 固定的、预设的矩形框。 | 整个视频帧。 |
| 核心技术 | 手动遍历像素,提取 H 值,然后用 if/elif 判断。 |
使用 cv2.inRange() 创建掩码,再用 cv2.bitwise_and() 提取颜色。 |
| 优点 | 逻辑简单直观,易于理解。 | 效率极高 (inRange是高度优化的 C++ 实现),功能强大,可扩展性好。 |
| 缺点 | 效率较低(Python 循环慢),颜色判断不够健壮(未考虑 S 和 V)。 | 需要预先确定颜色的 HSV 范围,这有时需要调试。 |
| 适用场景 | 简单的颜色分类任务,如判断交通灯颜色(假设摄像头固定)。 | 复杂的物体追踪、颜色分割、背景消除等。 |