收发分离多基地雷达椭圆联合定位:原理、算法与误差分析
前言
多基地(multistatic)雷达由多组相互独立的发射机(Tx)与接收机(Rx)构成。对收发分离 的双基地量测而言,目标到某一对焦点(Tx、Rx)的距离和 为常数,其等值曲线为椭圆。将多组双基地椭圆进行联合定位,即可在平面(或空间)内估计目标位置。本文系统给出几何模型、量测方程、最小二乘/最大似然求解、误差传播与 Cramér--Rao 下界(CRLB),并讨论可观测性、鲁棒估计与工程实现要点。
正文
1. 几何模型与坐标系
在二维直角坐标系中记目标位置为 x=x,y⊤\mathbf{x}=x,y^\topx=x,y⊤,第 iii 组双基地的发射机与接收机位置分别为 Ti=Tix,Tiy⊤\mathbf{T}_i=T_{ix},T_{iy}^\topTi=Tix,Tiy⊤、Ri=Rix,Riy⊤\mathbf{R}_i=R_{ix},R_{iy}^\topRi=Rix,Riy⊤。
双基地几何距离和:
hi(x)≜∣x−Ti∣2+∣x−Ri∣2. h_i(\mathbf{x}) \triangleq |\mathbf{x}-\mathbf{T}_i|_2+|\mathbf{x}-\mathbf{R}_i|_2 . hi(x)≜∣x−Ti∣2+∣x−Ri∣2.
其中:
x\mathbf{x}x:目标二维位置向量;
Ti\mathbf{T}_iTi:第 iii 组发射机位置向量;
Ri\mathbf{R}_iRi:第 iii 组接收机位置向量;
∣⋅∣2|\cdot|_2∣⋅∣2:欧氏范数(欧氏距离)。
若第 iii 组的双程传播时延 为 τb,i\tau_{b,i}τb,i,则对应的距离和量测 为
rb,i=cτb,i, r_{b,i}=c\tau_{b,i}, rb,i=cτb,i,
其中:
rb,ir_{b,i}rb,i:第 iii 组的距离和(单位 m);
ccc:电磁波在自由空间的传播速度(约 2.99792458×1082.99792458\times10^82.99792458×108 m/s);
τb,i\tau_{b,i}τb,i:第 iii 组的双程时间量测(单位 s)。
忽略噪声时,椭圆等式为
Ei={x∈R2 | ∥x−Ti∥2+∥x−Ri∥2=rb,i}. \mathcal{E}_i=\left\{\mathbf{x}\in\mathbb{R}^2 \,\middle|\, \|\mathbf{x}-\mathbf{T}_i\|_2+\|\mathbf{x}-\mathbf{R}_i\|2=r{b,i}\right\}. Ei={x∈R2 ∥x−Ti∥2+∥x−Ri∥2=rb,i}.
其中:
Ei\mathcal{E}_iEi:第 iii 组双基地椭圆的点集;
其余符号同前。
对单条椭圆,若设半长轴 ai=rb,i2a_i=\tfrac{r_{b,i}}{2}ai=2rb,i、双焦距 2ci=∣Ti−Ri∣22c_i=|\mathbf{T}_i-\mathbf{R}_i|_22ci=∣Ti−Ri∣2,则半短轴
bi=ai2−ci2. b_i=\sqrt{a_i^2-c_i^2}. bi=ai2−ci2 .
其中:
aia_iai:第 iii 条椭圆的半长轴;
bib_ibi:第 iii 条椭圆的半短轴;
cic_ici:焦点到椭圆中心的距离;
其余符号同前。
注:要使椭圆存在,需 rb,i>∣Ti−Ri∣2r_{b,i}>|\mathbf{T}_i-\mathbf{R}_i|_2rb,i>∣Ti−Ri∣2。
2. 量测模型与统计假设
考虑 mmm 组双基地量测,加入高斯噪声:
zi=hi(x)+vi,vi∼N(0,σi2), z_i = h_i(\mathbf{x}) + v_i,\quad v_i\sim\mathcal{N}(0,\sigma_i^2), zi=hi(x)+vi,vi∼N(0,σi2),
其中:
ziz_izi:第 iii 组的实际观测(距离和,单位 m);
hi(x)h_i(\mathbf{x})hi(x):噪声自由的理论距离和;
viv_ivi:零均值高斯噪声;
σi2\sigma_i^2σi2:第 iii 组量测噪声方差;
N(⋅,⋅)\mathcal{N}(\cdot,\cdot)N(⋅,⋅):高斯分布。
将各观测堆叠得
z=h(x)+v,v∼N(0,Σ), \mathbf{z}=\mathbf{h}(\mathbf{x})+\mathbf{v},\quad \mathbf{v}\sim\mathcal{N}(\mathbf{0},\mathbf{\Sigma}), z=h(x)+v,v∼N(0,Σ),
其中:
z=z1,...,zm⊤\mathbf{z}=z_1,\\ldots,z_m^\topz=z1,...,zm⊤:观测向量;
h(x)=h1(x),...,hm(x)]⊤\mathbf{h}(\mathbf{x})=h_1(\mathbf{x}),\ldots,h_m(\mathbf{x})]^\toph(x)=h1(x),...,hm(x)]⊤:理论量测向量;
v\mathbf{v}v:噪声向量;
Σ=diag(σ12,...,σm2)\mathbf{\Sigma}=\mathrm{diag}(\sigma_1^2,\ldots,\sigma_m^2)Σ=diag(σ12,...,σm2):噪声协方差矩阵。
3. 定位目标:最小二乘与最大似然
在高斯噪声下,最大似然等价于加权最小二乘:
x^=argminxJ(x)≜12∣W1/2(h(x)−z)∣22, \widehat{\mathbf{x}}=\arg\min_{\mathbf{x}} J(\mathbf{x})\triangleq \tfrac{1}{2}\left|\mathbf{W}^{1/2}\big(\mathbf{h}(\mathbf{x})-\mathbf{z}\big)\right|_2^2, x =argxminJ(x)≜21 W1/2(h(x)−z) 22,
其中:
x^\widehat{\mathbf{x}}x :位置估计;
J(x)J(\mathbf{x})J(x):加权残差二范数目标函数;
W=Σ−1\mathbf{W}=\mathbf{\Sigma}^{-1}W=Σ−1:权矩阵(噪声协方差的逆);
∣⋅∣2|\cdot|_2∣⋅∣2:二范数;
h(x)\mathbf{h}(\mathbf{x})h(x)、z\mathbf{z}z 同前。
4. 线性化与高斯--牛顿(GN)迭代
以当前迭代点 x(k)\mathbf{x}^{(k)}x(k) 进行一阶泰勒展开,定义残差
e(x)≜h(x)−z, \mathbf{e}(\mathbf{x}) \triangleq \mathbf{h}(\mathbf{x})-\mathbf{z}, e(x)≜h(x)−z,
其中:
e(x)\mathbf{e}(\mathbf{x})e(x):残差向量;
h(x)\mathbf{h}(\mathbf{x})h(x)、z\mathbf{z}z 同前。
第 iii 个量测的雅可比行向量为
ji(x)=∂hi(x)∂x=x−Ti∣x−Ti∣2+x−Ri∣x−Ri∣2, \mathbf{j}_i(\mathbf{x})=\frac{\partial h_i(\mathbf{x})}{\partial \mathbf{x}} =\frac{\mathbf{x}-\mathbf{T}_i}{|\mathbf{x}-\mathbf{T}_i|_2}+\frac{\mathbf{x}-\mathbf{R}_i}{|\mathbf{x}-\mathbf{R}_i|_2}, ji(x)=∂x∂hi(x)=∣x−Ti∣2x−Ti+∣x−Ri∣2x−Ri,
其中:
ji(x)\mathbf{j}_i(\mathbf{x})ji(x):第 iii 个量测对状态 x\mathbf{x}x 的梯度(1×2(1\times2(1×2 向量);
∂hi/∂x\partial h_i/\partial \mathbf{x}∂hi/∂x:对 x\mathbf{x}x 的偏导;
Ti,Ri\mathbf{T}_i,\mathbf{R}_iTi,Ri、∣⋅∣2|\cdot|_2∣⋅∣2、x\mathbf{x}x 同前。
将所有 ji\mathbf{j}_iji 叠成雅可比矩阵
J(x)=j1(x)⋮jm(x), \mathbf{J}(\mathbf{x})= \begin{bmatrix} \mathbf{j}_1(\mathbf{x})\\ \vdots\\ \mathbf{j}_m(\mathbf{x}) \end{bmatrix}, J(x)= j1(x)⋮jm(x) ,
其中:
J(x)\mathbf{J}(\mathbf{x})J(x):m×2m\times2m×2 的雅可比矩阵;
ji(x)\mathbf{j}_i(\mathbf{x})ji(x) 同前。
GN 更新:
Δx(k)=−(J⊤WJ)−1J⊤We(x(k)),x(k+1)=x(k)+Δx(k). \Delta\mathbf{x}^{(k)}= -\big(\mathbf{J}^\top\mathbf{W}\mathbf{J}\big)^{-1}\mathbf{J}^\top\mathbf{W}\mathbf{e}\big(\mathbf{x}^{(k)}\big),\quad \mathbf{x}^{(k+1)}=\mathbf{x}^{(k)}+\Delta\mathbf{x}^{(k)}. Δx(k)=−(J⊤WJ)−1J⊤We(x(k)),x(k+1)=x(k)+Δx(k).
其中:
Δx(k)\Delta\mathbf{x}^{(k)}Δx(k):第 kkk 次迭代的增量;
J=J(x(k))\mathbf{J}=\mathbf{J}(\mathbf{x}^{(k)})J=J(x(k)):在 x(k)\mathbf{x}^{(k)}x(k)处的雅可比;
W\mathbf{W}W:权矩阵;
e(x(k))\mathbf{e}(\mathbf{x}^{(k)})e(x(k)):当前残差;
(⋅)−1(\cdot)^{-1}(⋅)−1:矩阵逆;
x(k+1)\mathbf{x}^{(k+1)}x(k+1):更新后的估计。
为增强收敛性,可采用 LM 阻尼:
(J⊤WJ+λI)Δx=−J⊤We, \big(\mathbf{J}^\top\mathbf{W}\mathbf{J}+\lambda\mathbf{I}\big)\Delta\mathbf{x}=-\mathbf{J}^\top\mathbf{W}\mathbf{e}, (J⊤WJ+λI)Δx=−J⊤We,
其中:
λ>0\lambda>0λ>0:LM 阻尼因子;
I\mathbf{I}I:单位矩阵;
其余符号同前。
5. 可观测性与几何配置
本问题在二维中至少需要两条非退化椭圆 (即不同焦点构型、非同心同轴的测线)才能在几何上形成有限交点。局部可观测性可由信息矩阵的秩判断:
F(x)≜J⊤Σ−1J. \mathbf{F}(\mathbf{x})\triangleq \mathbf{J}^\top\mathbf{\Sigma}^{-1}\mathbf{J}. F(x)≜J⊤Σ−1J.
其中:
F(x)\mathbf{F}(\mathbf{x})F(x):费舍尔信息矩阵(FIM);
J\mathbf{J}J:雅可比矩阵;
Σ\mathbf{\Sigma}Σ:噪声协方差;
(⋅)⊤(\cdot)^\top(⋅)⊤:转置。
若 rank(F)=2\mathrm{rank}(\mathbf{F})=2rank(F)=2,则在该点局部可观测。几何精度指标可取
GDOP≜trace(F−1). \mathrm{GDOP}\triangleq \sqrt{\mathrm{trace}\big(\mathbf{F}^{-1}\big)}. GDOP≜trace(F−1) .
其中:
GDOP\mathrm{GDOP}GDOP:几何精度因子(值越小几何越好);
trace(⋅)\mathrm{trace}(\cdot)trace(⋅):矩阵迹;
F−1\mathbf{F}^{-1}F−1:信息矩阵的逆;
其余符号同前。
6. 估计误差与 Cramér--Rao 下界(CRLB)
GN/WLS 在正确线性化与小噪声条件下的协方差近似为
Cov(x^)≈(J⊤Σ−1J)−1. \mathrm{Cov}(\widehat{\mathbf{x}})\approx \big(\mathbf{J}^\top\mathbf{\Sigma}^{-1}\mathbf{J}\big)^{-1}. Cov(x )≈(J⊤Σ−1J)−1.
其中:
Cov(x^)\mathrm{Cov}(\widehat{\mathbf{x}})Cov(x ):位置估计的协方差矩阵;
J\mathbf{J}J、Σ\mathbf{\Sigma}Σ 同前。
在无偏估计条件下,CRLB 给出协方差的理论下界:
Cov(x^)⪰F−1,F=J⊤Σ−1J. \mathrm{Cov}(\widehat{\mathbf{x}})\succeq \mathbf{F}^{-1},\quad \mathbf{F}=\mathbf{J}^\top\mathbf{\Sigma}^{-1}\mathbf{J}. Cov(x )⪰F−1,F=J⊤Σ−1J.
其中:
⪰\succeq⪰:半正定序关系;
F\mathbf{F}F:FIM;
其余符号同前。
7. 未同步/偏差建模(时钟偏差或系统延迟)
若所有量测共享一个未知偏差 bbb(例如系统时延),量测模型写作
zi=hi(x)+b+vi. z_i = h_i(\mathbf{x}) + b + v_i. zi=hi(x)+b+vi.
其中:
bbb:全局加性偏差(单位 m);
其余符号同前。
将状态扩展为 θ=x,y,b⊤\boldsymbol{\theta}=x,y,b^\topθ=x,y,b⊤,其雅可比为
Jθ=j1(x)1⋮⋮jm(x)1. \mathbf{J}_\theta= \begin{bmatrix} \mathbf{j}_1(\mathbf{x}) & 1\\ \vdots & \vdots\\ \mathbf{j}_m(\mathbf{x}) & 1 \end{bmatrix}. Jθ= j1(x)⋮jm(x)1⋮1 .
其中:
Jθ\mathbf{J}_\thetaJθ:对扩展状态的雅可比(m×3)(m\times3)(m×3);
ji(x)\mathbf{j}_i(\mathbf{x})ji(x):对 x,yx,yx,y 的梯度;
右侧列向量 "1" 表示对偏差 bbb 的偏导;
其余符号同前。
相应的 GN/LM 更新、FIM 与 CRLB 只需将 J\mathbf{J}J 替换为 Jθ\mathbf{J}_\thetaJθ 即可。
8. 鲁棒估计(抗粗大误差)
当存在外点(非高斯大误差)时,可用 MMM-估计改写目标:
x^=argminx∑i=1mρ(ei(x)σi), \widehat{\mathbf{x}}=\arg\min_{\mathbf{x}} \sum_{i=1}^m \rho\left(\frac{e_i(\mathbf{x})}{\sigma_i}\right), x =argxmini=1∑mρ(σiei(x)),
其中:
ρ(⋅)\rho(\cdot)ρ(⋅):鲁棒损失函数(如 Huber、Cauchy);
ei(x)=hi(x)−zie_i(\mathbf{x})=h_i(\mathbf{x})-z_iei(x)=hi(x)−zi:第 iii 个残差;
σi\sigma_iσi:量测标准差;
其余符号同前。
采用迭代重加权最小二乘 (IRLS),权值更新为
wi=ψ(ti)ti,ti=eiσi, w_i=\frac{\psi(t_i)}{t_i},\quad t_i=\frac{e_i}{\sigma_i}, wi=tiψ(ti),ti=σiei,
其中:
wiw_iwi:第 iii 个量测的鲁棒权;
ψ(t)=ρ′(t)\psi(t)=\rho'(t)ψ(t)=ρ′(t):影响函数;
tit_iti:标准化残差;
ei,σie_i,\sigma_iei,σi 同前。
9. 三维扩展与多目标情形
三维时令 x=x,y,z⊤\mathbf{x}=x,y,z^\topx=x,y,z⊤,其量测函数保持不变:
hi(x)=∣x−Ti∣2+∣x−Ri∣2. h_i(\mathbf{x}) = |\mathbf{x}-\mathbf{T}_i|_2+|\mathbf{x}-\mathbf{R}_i|_2 . hi(x)=∣x−Ti∣2+∣x−Ri∣2.
其中:
x\mathbf{x}x:三维目标位置;
Ti,Ri\mathbf{T}_i,\mathbf{R}_iTi,Ri:三维台站坐标;
其余符号同前。
雅可比行向量推广为
ji(x)=x−Ti∣x−Ti∣2+x−Ri∣x−Ri∣2∈R1×3. \mathbf{j}_i(\mathbf{x})=\frac{\mathbf{x}-\mathbf{T}_i}{|\mathbf{x}-\mathbf{T}_i|_2}+\frac{\mathbf{x}-\mathbf{R}_i}{|\mathbf{x}-\mathbf{R}_i|_2}\in\mathbb{R}^{1\times 3}. ji(x)=∣x−Ti∣2x−Ti+∣x−Ri∣2x−Ri∈R1×3.
其中:
ji(x)\mathbf{j}_i(\mathbf{x})ji(x):三维梯度行向量;
其余符号同前。
多目标情形需结合数据关联(如最近邻、JPDA)或稀疏重构方法,量测模型在目标维上以联合似然建模,这里不再展开。
10. 数值实现要点与可视化
(1)初始化:
可用各双基地焦点中点的几何中心作初值
x(0)=1m∑i=1mTi+Ri2. \mathbf{x}^{(0)}=\frac{1}{m}\sum_{i=1}^m \frac{\mathbf{T}_i+\mathbf{R}_i}{2}. x(0)=m1i=1∑m2Ti+Ri.
其中:
x(0)\mathbf{x}^{(0)}x(0):初始位置;
Ti,Ri,m\mathbf{T}_i,\mathbf{R}_i,mTi,Ri,m 同前。
(2)收敛判据:
∣Δx(k)∣2<ϵx或∣e(x(k))∣2<ϵe. |\Delta\mathbf{x}^{(k)}|_2<\epsilon_x\quad \text{或}\quad |\mathbf{e}(\mathbf{x}^{(k)})|_2<\epsilon_e. ∣Δx(k)∣2<ϵx或∣e(x(k))∣2<ϵe.
其中:
ϵx,ϵe\epsilon_x,\epsilon_eϵx,ϵe:步长与残差阈值;
Δx(k)\Delta\mathbf{x}^{(k)}Δx(k)、e(⋅)\mathbf{e}(\cdot)e(⋅) 同前。
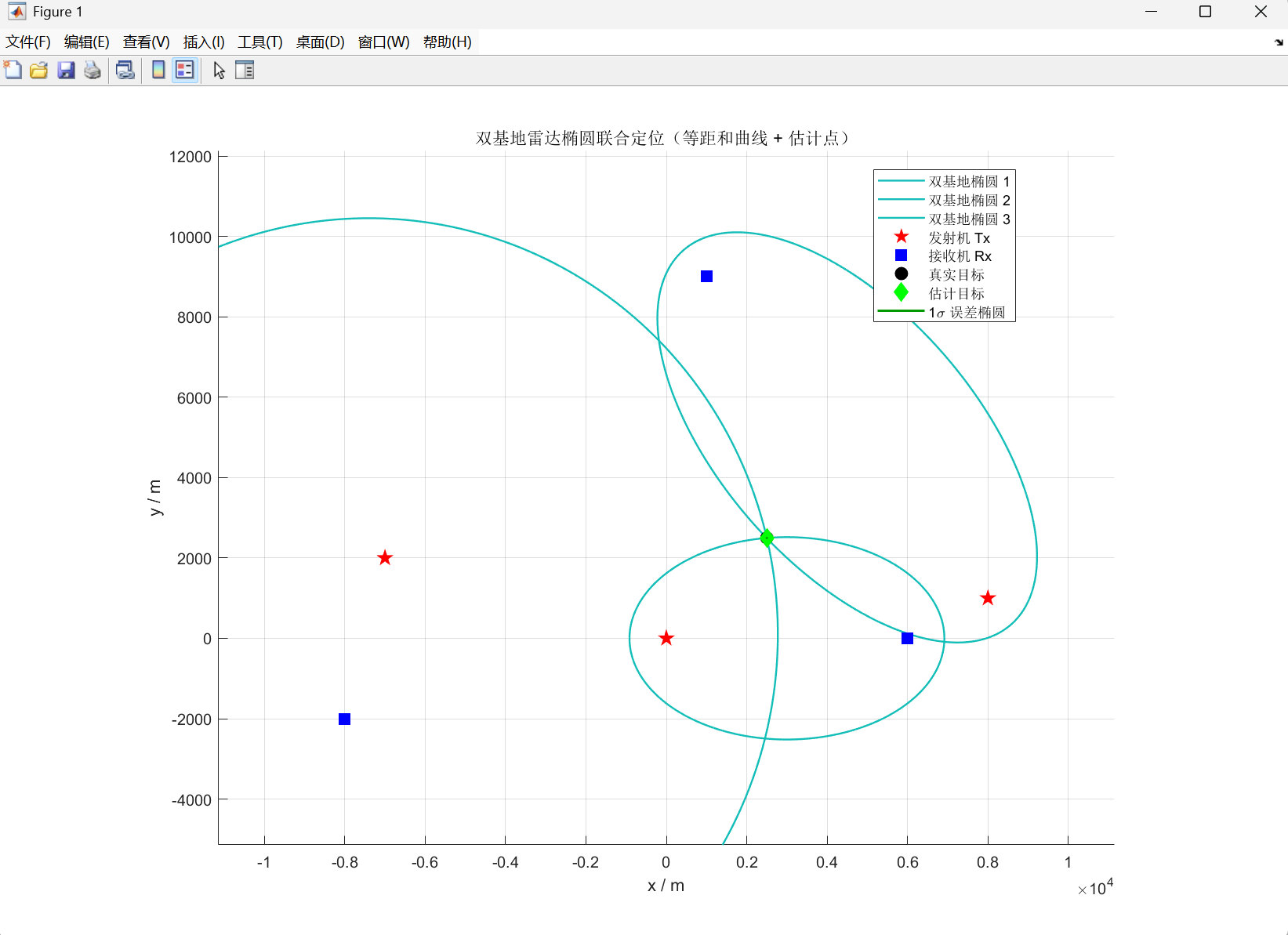
(3)可视化:
每条双基地椭圆可绘制等值线
fi(x,y)=(x−Tix)2+(y−Tiy)2+(x−Rix)2+(y−Riy)2−zi=0, f_i(x,y)=\sqrt{(x-T_{ix})^2+(y-T_{iy})^2}+\sqrt{(x-R_{ix})^2+(y-R_{iy})^2}-z_i=0, fi(x,y)=(x−Tix)2+(y−Tiy)2 +(x−Rix)2+(y−Riy)2 −zi=0,
其中:
fi(x,y)f_i(x,y)fi(x,y):第 iii 条椭圆的隐式函数;
(x,y)(x,y)(x,y):平面网格坐标;
Tix,Tiy,Rix,Riy,ziT_{ix},T_{iy},R_{ix},R_{iy},z_iTix,Tiy,Rix,Riy,zi 同前。
(4)误差椭圆(1σ):
若得到 Cov(x^)\mathrm{Cov}(\widehat{\mathbf{x}})Cov(x ),其特征分解
Cov(x^)=VDV⊤, \mathrm{Cov}(\widehat{\mathbf{x}})=\mathbf{V}\mathbf{D}\mathbf{V}^\top, Cov(x )=VDV⊤,
其中:
V\mathbf{V}V:特征向量矩阵(主轴方向);
D=diag(λ1,λ2)\mathbf{D}=\mathrm{diag}(\lambda_1,\lambda_2)D=diag(λ1,λ2):特征值(主轴方差);
λ1,λ2\lambda_1,\lambda_2λ1,λ2:两主轴方差;
⊤\top⊤:转置。
则 1σ 椭圆半轴为 (λ1,λ2)(\sqrt{\lambda_1},\sqrt{\lambda_2})(λ1 ,λ2 ),方向由 V\mathbf{V}V 给出。
总结
本文从几何出发,建立了收发分离多基地雷达 的双基地距离和量测模型,证明单组量测对应椭圆约束,并在高斯噪声下将联合定位归结为加权最小二乘/最大似然 问题;随后给出基于雅可比的 GN/LM 迭代 、可观测性与几何指标、误差协方差与 CRLB 的闭式表达;进一步讨论了共享偏差建模 、鲁棒估计以及三维推广与可视化。工程实现中,合理的初值、阻尼调节与鲁棒权更新,可显著提升收敛性与抗外点能力;几何上应尽量拉大不同双基地基线的方向多样性,以降低 GDOP、改善定位精度。