1. 前言
不知不觉到了2025年的十月份,我恰好是三年前开始接触电机控制相关内容的。网络上也有很多人分享了自己在电机控制方面的学习经历和经验。不过我看大多数都是工程师的视角出发的,我这里想以一个硕士研究生的视角,分享自己在电机控制方面的学习经历和积累的经验。
以下内容仅供参考哈,觉得有用的可以吸收,无用的就当作没看到。
2. 个人的学习过程
我是在合工大念的本科,在大三下的时候,也就是2022年的2-7月份,我上了两门与电机控制相关的课程。一门是《电力拖动基础》,任课教师是王涵宇老师 ;一门是《运动控制系统》,任课教师是于子翔老师。两位老师都极为年轻,上课也上得很好,让我对电机控制开始产生了兴趣。《电力拖动基础》感觉还更偏向于《电机学》这门课,里面的内容还算比较古老的;《运动控制系统》这门课的教材是《电力拖动自动控制系统------运动控制系统(第5版)》(由阮毅、杨影、陈伯时老师编著)。大三下的课本来就不多,相当于这两门电机课程就占了我不少的时间,因此我在选方向的时候,就更偏向电机控制了。当时上课的时候,于老师还无私地分享了他的博士学位答辩PPT《直流偏置型游标磁阻电机系统控制策略研究》,做的内容非常全面,从基础的建模与控制,到电机的MTPA控制、弱磁控制以及容错控制都有涉及。当时我虽然啥也看不懂,但我觉得好高级哈哈哈,让我内心完全倾向于电机控制这个方向。在选方向的时候,王涵宇老师还特地腾出自己的时间来给我讲一些电力电子方向的差异(1对2服务哈哈,王老师对着我和另一位本科生),同时也介绍了一些方向在学院内的发展以及学生毕业后的大概薪资。
综上,由于两门课程的引导以及两位老师无私地介绍以及分享自己的经验,让我对电机控制这两个方向产生了很浓厚的兴趣,所以呢,我在保研的时候,就选择了做电机控制方向的老师。
时间来到2022年8月中旬,当时拿到了心仪院校的学硕优营名额(这个院校的夏令营时间极晚,我相信保研人都知道的哈哈哈)。然后我就开始买了电机控制的相关书籍来看。
这里我为什么这么确定我自己研究生做的就是电机控制方向呢?一是我当时只联系了一位老师,老师的方向就是电机控制;二是我恰好入营了一所院校,恰好拿了优营,且该院校为铁offer ,完全不会鸽人。
所以这时候我就买了一本《现代电机控制技术》,如下图,时间是2022年8月20日。

2.1 22年9月
后来九月份开学了,上水课的时候,就无聊翻翻这本《现代电机控制技术》来看看。但我当时也跟大多数小白一样,看不懂,有点吃力。
然后开始在bilibili上搜一些电机控制相关的教学视频。我搜到了up主"十九班的中帅哥",他主要是讲一些异步电机的相关内容,讲的都很好。我把他分享的Sang-Hoon Kim的《Electric Motor Control》给存了起来。
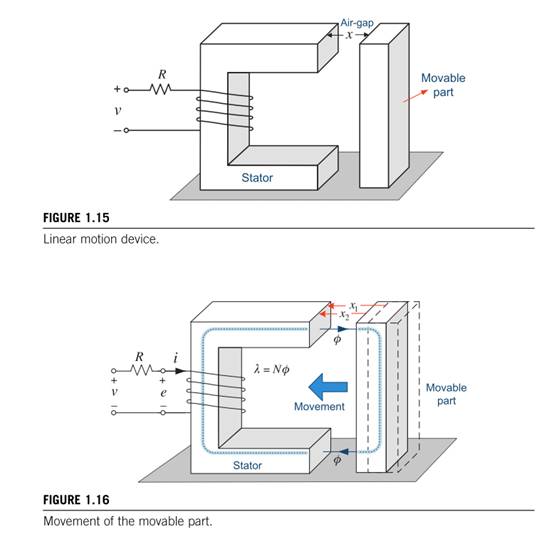
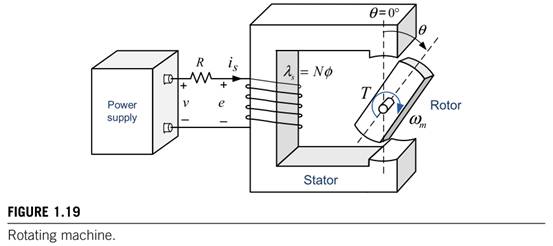
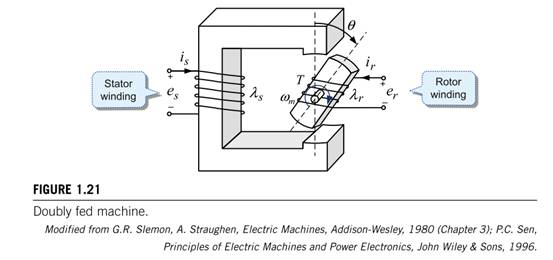
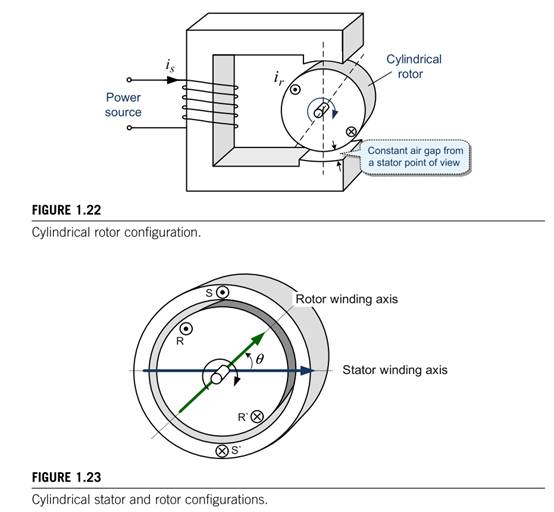
我当时在想,既然以后需要常用到英语,那不如以这本《Electric Motor Control》作为入门教材,边学英语边学电控基础知识。当我看我这本书的第一章,直接被折服,从来没讲这么好的教材。
下面截取了教材第一章的几幅图,这几幅图就是作者讲述电机是怎么一步一演化而来的,由简入难,示意图十分直观、清楚。
于是乎,我计划着每周开一章内容,同时学习一些电机控制的相关仿真。
在仿真上,我先看的是这份视频。并且跟着up主从头搭建了一遍仿真。
PS:我自己发现有太多同学懒得动手,只愿意看视频。个人建议还是多动手吧,自己动手搭搭仿真,能学到太多东西了。
2.2 22年10月
在跟着上述视频搭建好基础的仿真之后,此时大概是九月份。我十月份就开始学习一些电机控制相关的基础知识了,具体的学习内容如下(这是我当时自己做的word笔记):
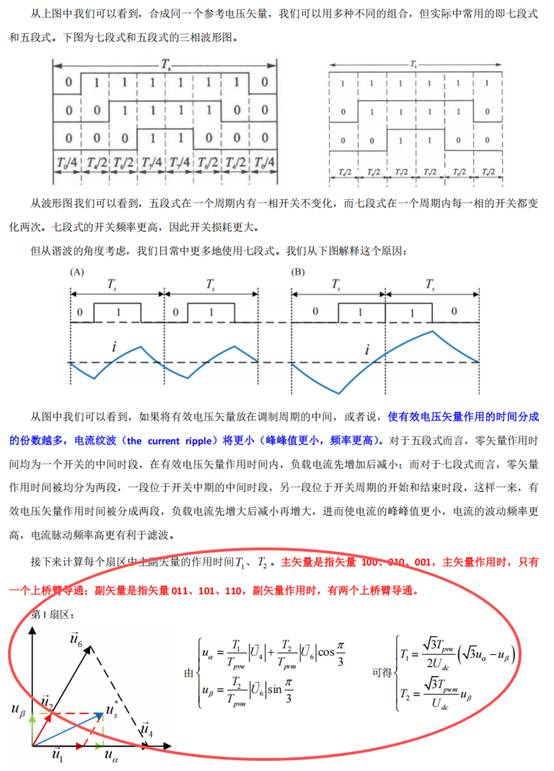
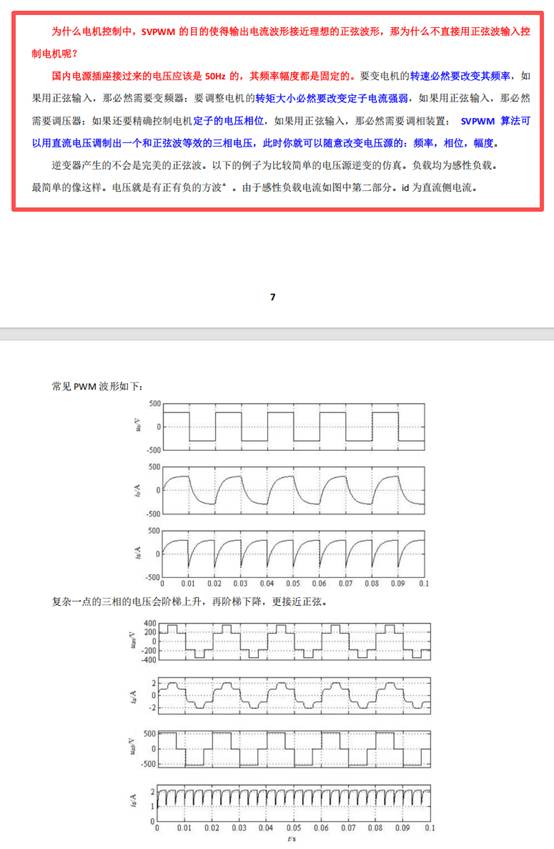
SVPWM我是跟踪下面这位up主学习的。讲得非常清晰。当然不只是听他的内容,我还手把手重新推导了所有的公式,对SVPWM的原理有了非常清晰的了解。具体清晰到什么地步呢------比如现在只给我纸和笔,同时给我足够的时间,我可以把SVPWM的所有公式手动推导出来。(这一内容为我后来学习开绕组电机的SVPWM奠定了扎实的基础)
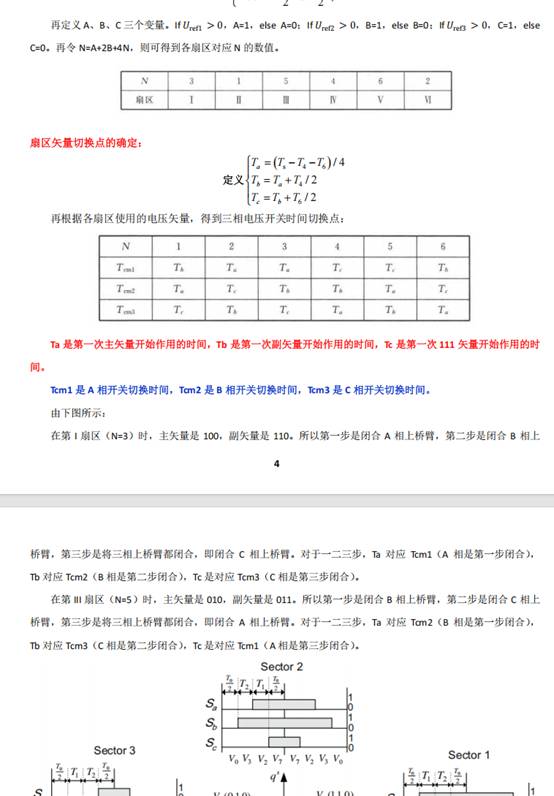
下面这是我word笔记中关于SVPWM的部分内容,有的图片是截取论文的,有的图片是自己做的,公式是自己打的。文字也都是自己一个字一个字打出来的。
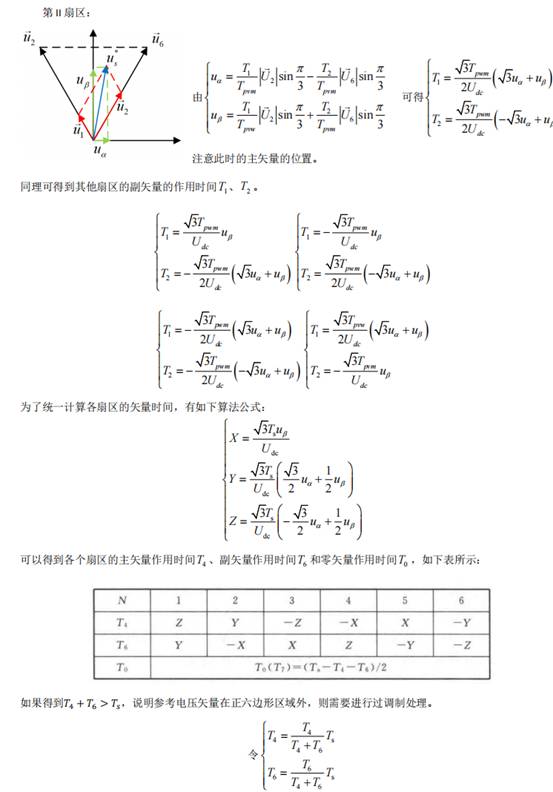
我还会在笔记中记录一些相关问题的答案,比如下图方框所示的内容。这也能够让我更好的理解算法。
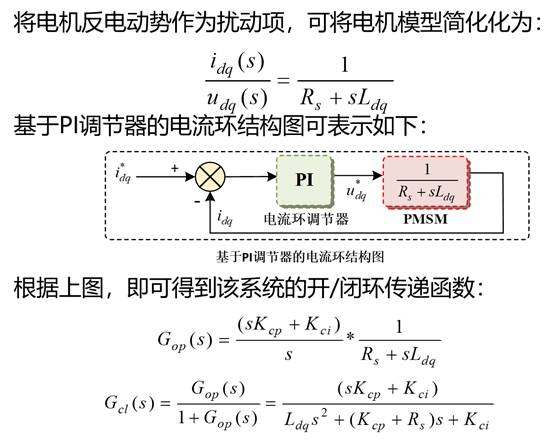
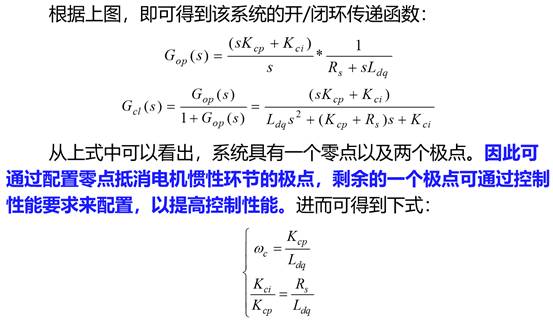
学了SVPWM,后面开始学调PI,调电流环PI的话,网上其实有很多教程了,带宽配置法设置的Kp=wc*Ls,Ki=wc*Rs这个是最常用的。
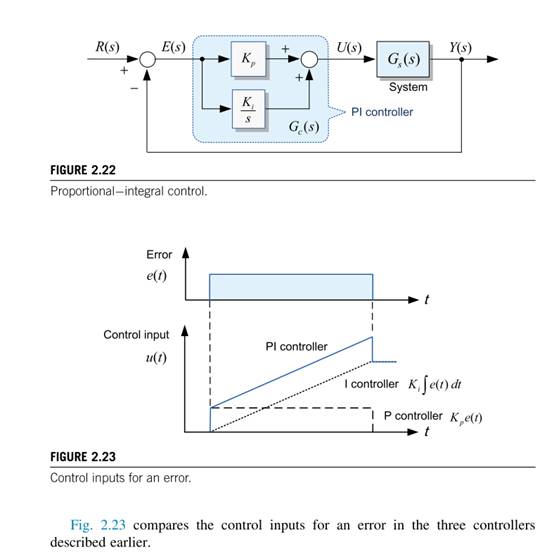
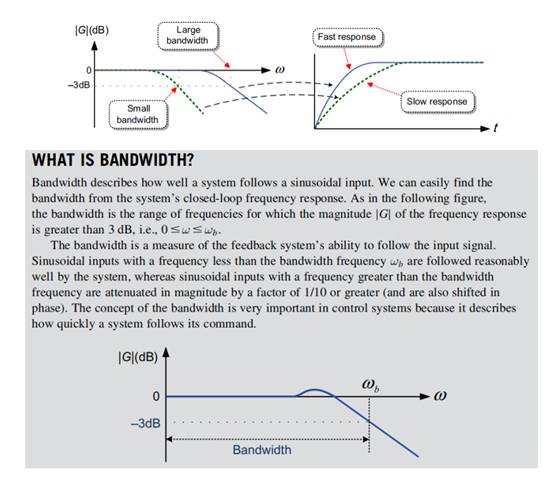
关于带宽以及PI配置,在Sang-Hoon Kim的《Electric Motor Control》也有所阐述,如下图所示。
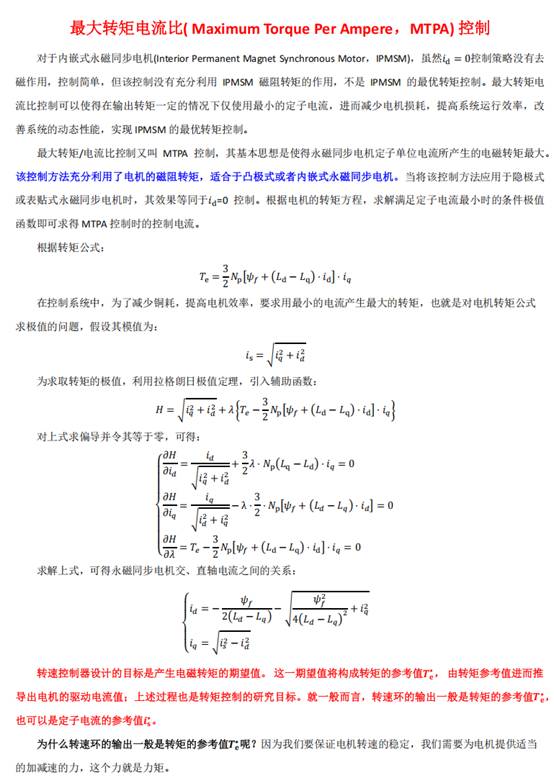
在学完PI之后,由于受到于老师博士论文的影响,也就是前面说的MTPA、弱磁控制。我就开始学习了MTPA控制和弱磁控制。在这个过程中,我也自己动手去推导了所有公式,我个人笔记如下图所示。
但是,当时出现了一个问题,速度环的输出到底是定子电流好,还是转矩好。当时琢磨了好久,认为一定要分个胜负。后来发现其实二者都可以,只不过对应的PI参数有所区别。
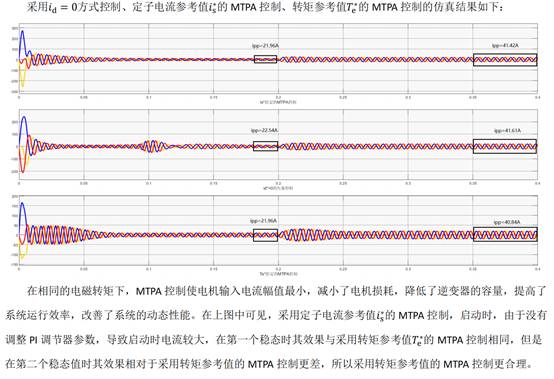
当时也做了相应的仿真,比较出MTPA确实可以降低IPMSM的相电流幅值。当然了,当时的仿真做的还很拉跨,PI没有限幅,参数也设的不好,比如下图启动电流幅值甚至都到了200+A。
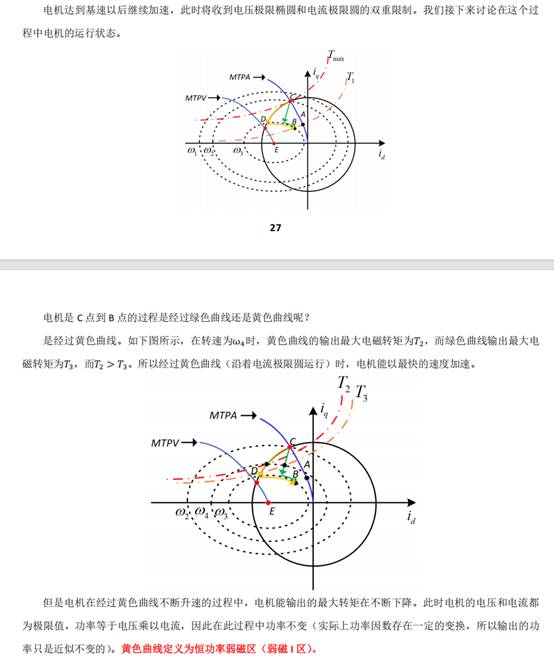
后面又到了弱磁控制,学弱磁的时候,弱磁的各个曲线不难,难的是弱磁时电流走的变化路径是啥,到底是怎么样走的,而且怎样走才能最快。
我当时以为用个传统算法不加任何措施就可以实现快速的弱磁,后来发现并不是。自己在弱磁曲线上思考了好久,同时也把自己的思考写到了笔记里,如下图。
2.3 22年11月-12月
这段时间,导师开始安排课题了,做的是开绕组永磁电机的控制。这时候我已经有了一点点传统三相永磁电机控制的基础,这时候入门开绕组永磁电机的控制,其实就比较容易了。
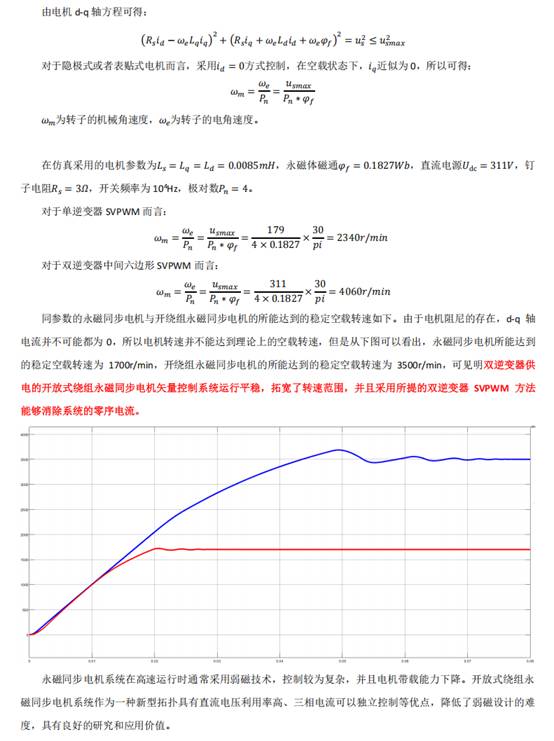
在学习开绕组的时候,不仅仅是简单的复现、让电机跑起来,而是让仿真结果贴近于理论分析。例如,都说在不弱磁条件下,双逆变器驱动的开绕组永磁电机可以达到单逆变器驱动的传统三相电机两倍的转速,下面我就做了仿真验证,确实是差不多两倍的结果。
2.4 23年1月-2月
这时候,把基础学的差不多了,老师建议可以买块DSP来玩玩看看,学学代码,为后面实验做准备。

没记错的话,当时是感觉顾老师的视频比较好,讲的比较清晰。
当然这些年网上也多了很多DSP的教程,大家可以选择合适自己的来看。
学DSP主要是要会自己实操,多调几次,大概就会了。
2.5 23年3月
在前面这些时间里:
一是我在坚持着读《Electric Motor Control》(这时候已经读完了,英语能力也有了明显提高,阅读文献不需要过的翻译器)。
二是在做毕设,不断地阅读以及复现开绕组电机调制的相关论文。
三是保持做笔记的习惯,正如前面所展示的,我在学习知识的时候都会存下笔记;进组之后,老师是要求写周报,所以我在22年11月份开始,相当于把做笔记改成了写周报,但二者的本质都是一样的------记录自己所学的东西。
**经过几个月的学习,我甚至开始有了自己的想法。**我之前的实现也是在做开绕组电机调制的,不过做的并不是单台电机,而是多台。我就借鉴了师兄的思路,想想在单台电机上能不能用类似的想法。
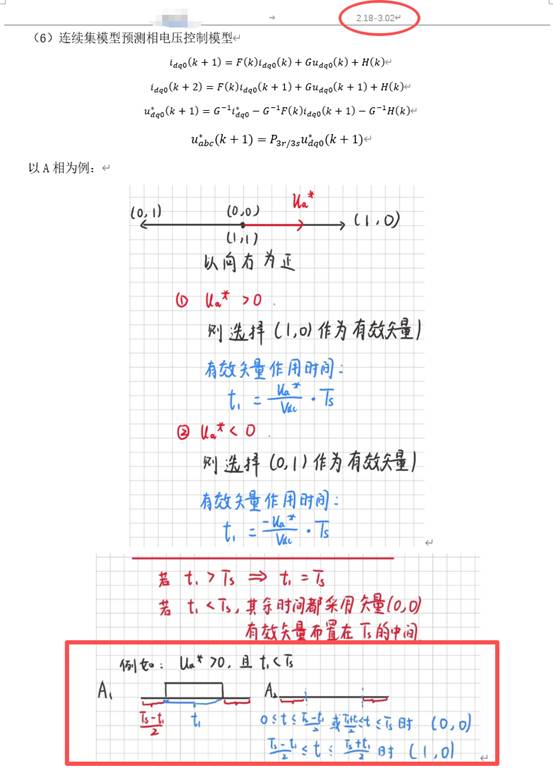
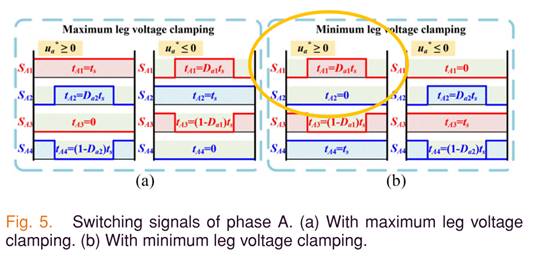
下面我展示了我23年2月低到3月初的周报(日期在周报的右上角)里面的部分截图。注意看我周报最下方画的开关状态波形(调制算法的开关波形),那是我第一个idea;过了一段时间看文献的时候,我发现这个idea在一篇22年的TIE论文里面有出现(我下面贴了TIE论文画的图,黄色框内的波形与我周报下方的图一致)。
当时我的心情是非常高兴的。我想的并不是"我的idea被别人发了",而是"我竟然能跟顶刊论文想到一块",这件事其实是给了自己莫大鼓舞。在看这篇TIE论文的时候,感觉人家确实把论文写的很好。以我当时的能力,就算别人没发,我也没办法发出来,毕竟没人家那个写作水平。
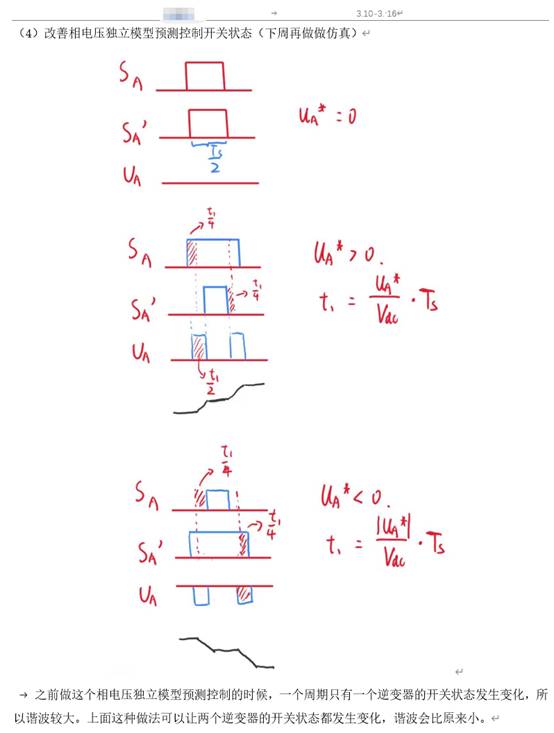
又过了两周时间(3月10到3月16之间),突然在某天拉屎的时候,确实是拉屎的时候来了灵感,想着在上图做一点改进,改进之后的波形如下图所示。
2.6 23年4月
做了上图的改进之后,我并没有仿真验证,而是过了两周才进行验证。但是验证的结果是极为喜人的。
如下图所示,我发现,我的做的一个非常简单的调制算法竟然和一篇TIE上面的经典调制算法出来的结果一模一样。注意,是一模一样,两种方法产生的电流THD完完全全是相同的,不存在一丁点差值。这说明,我提的这个算法能够大幅简化计算过程,并且不改变调制效果。。。那这第一个idea不来了吗,这也太凑巧了。
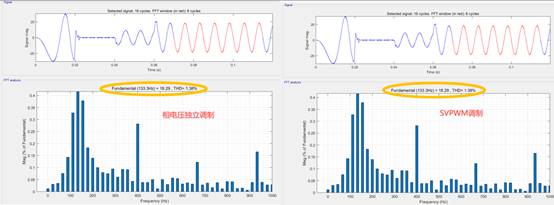
PS:这里说一点,就是前面在我大量复现经典论文的同时,仿真能力有了明显提升,此时的仿真也开始逐渐规范化。上述仿真能够实现两种算法出现同一电流 THD ,一方面需要你两个算法本身就是等效的,另一方面需要你两个模型搭的"一致"。比如说我上面做的是PWM 算法,那除了PWM 算法之外的其他控制器以及控制器的时序等等,全都需要设置成一样的。
2.7 23年5月
四月份毕设仿真都完成的差不多了,打算毕设大论文收尾了。老师说这太早了,让我看看能不能做做实验。当时我的想法是:怎么这么早就开始实验?我还以为是自己有新的 ideas ,且经过仿真验证我的ideas 之后,才开始进行实验验证。
在做实验的时候,师兄是给了基础的算法,需要我自己在上面改,把里面的算法都改成自己要用的算法。在做实验自己改代码的过程中,我对电机控制系统的基本控制时序有了非常清晰的了解,也开始发现,当时毕设搭建的仿真全都是错的。。。
不过呢,事实证明,导师让我那么早开始实验,是一件极为正确的事情。我做完实验之后,回来一点点地把我的仿真都改成离散化的,让我的仿真更贴合了实际。
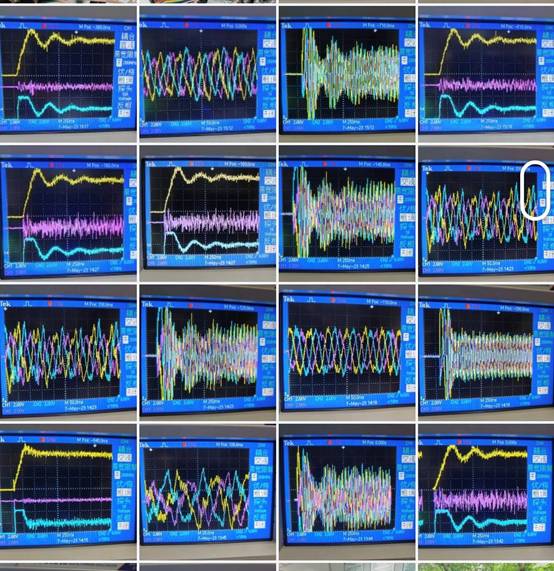
23年5月初完成的实验,用手机拍的实验波形
2.8 23年9月
这段时间主要是开学上课、准备搭实验平台。这段时间也没闲着,花了比较多的时间看文献。因为我这时候就属于刚入门,对很多内容都不了解,所以我这时候用表格,作为我的文献阅读笔记,如下图所示。
主要是,我会记录论文中:
1 .指出了现有方法的哪些问题。
2 .该文章的贡献是什么。
3 .论文中的什么内容是我未来可以参考的、可以利用的、可以学习的。
4 .论文中的Introduction 部分还有什么参考文献做的什么内容是对我有利的、是我该学习的。

这种文献阅读记录还是挺有用的,大家也可以自己探寻更简便的、做文献阅读笔记的方法。
2.9 23年10月
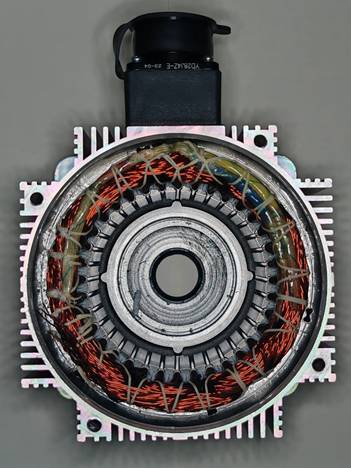
我的方向是开绕组PMSM,之前毕设用的是开绕组直线电机,课题组里没有现成的开绕组PMSM。需要自己去买电机来改造。
下面就是当时买的某台伺服PMSM,打开电机转子后,拍下的电机绕组。这时候就需要把电机绕组从传统的三相中心点连接的形式,改成三相中心点断开的形式。
2.10 23年11月
电机和实验平台搭好之后,开始跑基本的算法。
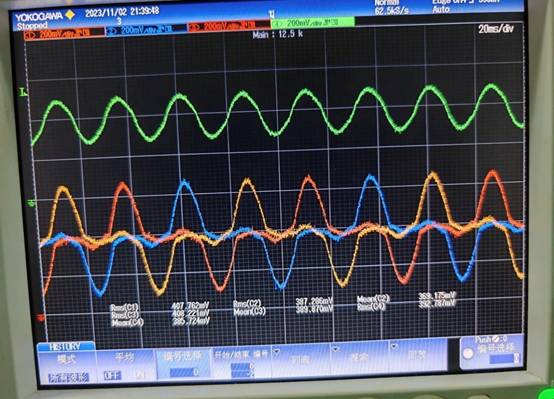
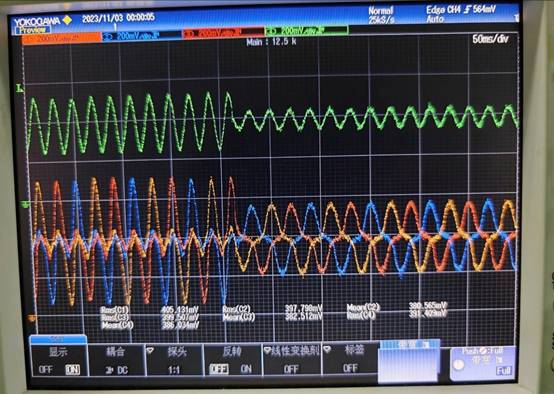
这是我开绕组PMSM刚跑起来时的波形图,左上角时间为2023.11.02 21:39:48,示波器里日期是没错的,但是时间可能比实际晚一个小时。电机跑起来的真实感受是,很高兴,也觉得很神奇。因为这个波形确实就和仿真中的一模一样。黄蓝红三相为ABC三相电流,绿色的为开绕组PMSM的零序电流。由于PMSM存在大量的三次谐波反电势,中性点打开之后就会出现大量的三次谐波电流,这一实验结果是和仿真、理论一致的。
这是开始加零序电流抑制后的波形,虽然零序电流大幅下去了,但是还有不小的零序电流,三相电流的畸变还是很明显。当这是11.03晚上的11点左右。
后来经历了一段时间的炸板子,到十一月底的时候又重新实验。这时候电流的正弦度明显又比之前高了一些。

这张图的是11月29日22点半左右。当时是真爱做实验,每次在实验室一待就是一天,即便是快到考试周了,我还花不少时间在实验上面。
2.11 23年12月
到了十二月份,这时候已经把三相电流空的不错了。电流正弦很多了。下面黄蓝红三相是ABC是开绕组PMSM的三相电流(是用电流钳测的),绿色的是电机的电角度。(相电流里面还有一点轻微的五七次谐波,不过开绕组PMSM主要关注的是三次谐波电流,所以剩一点五七次谐波影响不大)
2.12 24年1月-5月
这时候就验证自己的idea、写论文;同时不断学习论文,找新的idea、做实验。在这里想说的一点是,在23年11月及12月,相当于开始渐渐地熟悉了实验平台,把基本的电流环PI参数、速度环PI参数搞的差不多了;在24年的这几个月里,主要是验证算法,由于前面已经打了一定的基础,调试新的算法还是很快的。
这里贴一些24年4-5月份左右画的论文里的波形图。这时候画的是非常烂的,基本看不出啥效果。。。
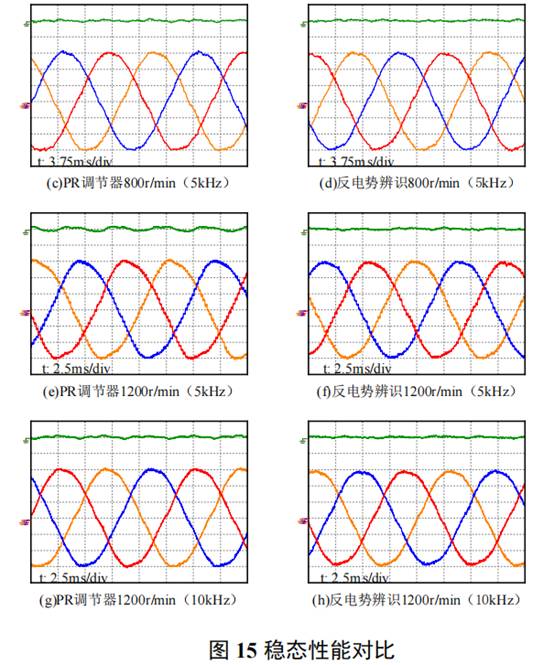
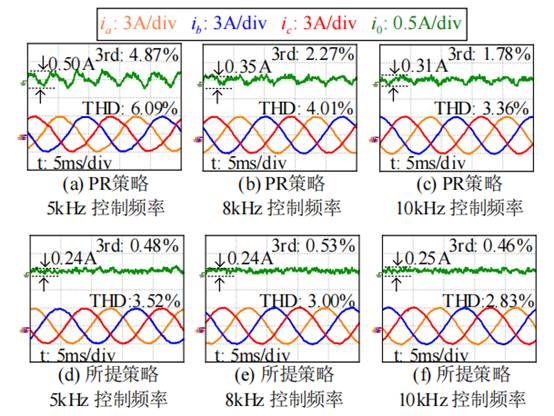
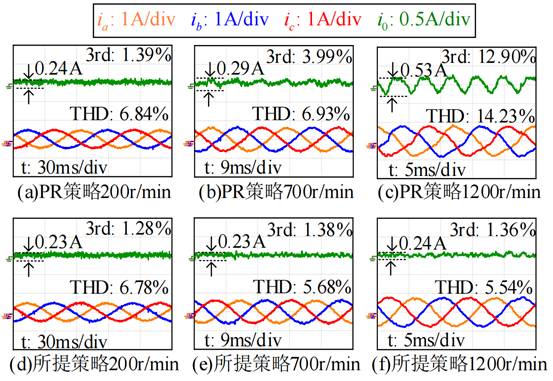
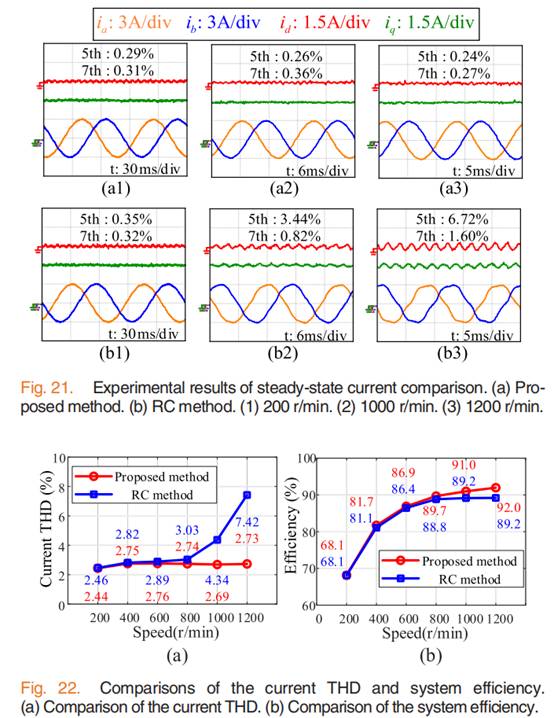
这是24年11月左右画的图,看起来就相对清晰一些,图片上标注了数据,方便看到对比结果。
从22 年9 月相当于一个完全小白入门,到24 年5 月相当于已经完成了一定的科研训练,已经具备了"思考创新点"、"仿真验证"、"实验验证"、"处理数据"、"写论文的能力"。后面基本上重复性的做一些实验和项目。因此,学习过程分享到这个时间段即可。
PS :因为我是保研入学,22 月9 月到24 年到5 月之间其实有很多时间是比较悠闲的(各种休闲娱乐,且中途涉及了较长的本科生寒暑假),并没有完全利用起所有时间。如果是在研究生期间踏入电机控制这个方向,由于研究生的时间相对紧凑,没有太长的寒暑假,且师兄师姐都在身边可以相互学习,那么这个科研训练的时间是会被大幅缩小的。
3. 经验总结
下面就把一些经验总结出来,供各位研究生做一个参考,希望能够帮助到大家。
1仿真是基础,仿真不能脱离实际
在毕设的时候,我都是自己思考搭建的仿真,基本没有参考别人的仿真。当时仿真做出来的效果也都不错,以为自己复现的挺好。
但是后来在复现一些算法的时候,遇到了一些怎么也想不明白的问题。刚好当时毕设仿真做的差不多了,老师让我最好能进行实验验证一下。当时我的想法是:怎么这么早就开始实验?我还以为是自己有新的ideas,且经过仿真验证我的ideas之后,才开始进行实验验证。
在做实验的时候,师兄是给了基础的算法,需要我自己在上面改,把里面的算法都改成自己要用的算法。在做实验自己改代码的过程中,我对电机控制系统的基本控制时序有了非常清晰的了解,也开始发现,当时毕设搭建的仿真全都是错的。然后就开始重新改我的仿真,这个过程非常痛苦。
不过呢,事实证明,导师让我那么早开始实验,是一件极为正确的事情。
把仿真改对之后有个极为明显的好处:
那就是,基本上,仿真能验证出来的算法,实验中就能验证。如果验证不了的话,你可以再去想想实验中的什么情况是你没有考虑到的;在你考虑的足够周全的情况下,仿真和实验的差距非常小。
比如这位在前一天下午接了Simunlink仿真模型作为参考,第二天上午就已经在实验里面验证出来的。
又比如下面,这是一位大三的同学(确实没错,人家是大三,而我大三的时候连电机怎么跑起来的都不知道),也是借鉴了Simunlink仿真模型作为参考,也能够快速地把算法应用到实验中,且能够实现预期的效果。
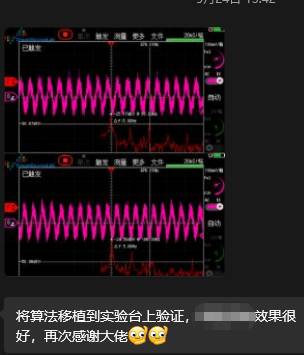
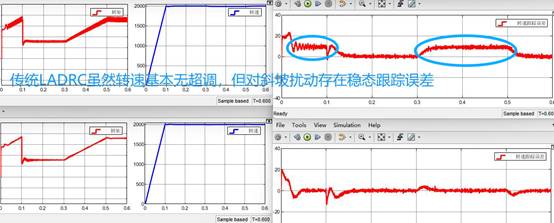
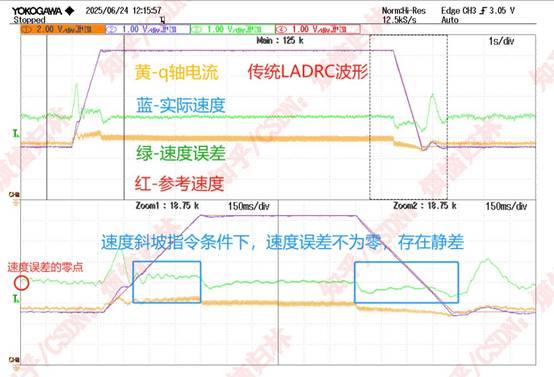
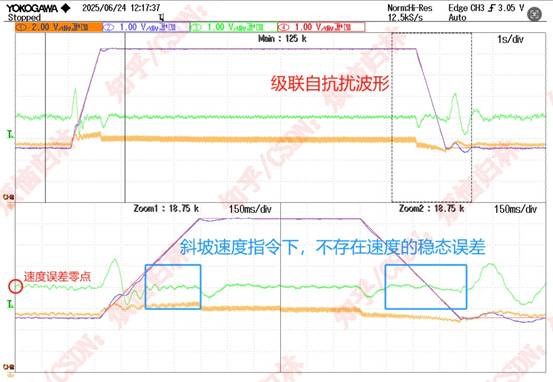
下面是我自己的做的级联LESO(线性扩张状态观测器,Linear extended state observer)的速度环实验和仿真。级联LESO是可以有效跟踪斜坡速度指令(或者斜坡负载扰动)且没有稳态误差的;但是传统的LESO就不可以12。
参考文献:
1 G. Wang, R. Liu, N. Zhao, D. Ding and D. Xu, "Enhanced Linear ADRC Strategy for HF Pulse Voltage Signal Injection-Based Sensorless IPMSM Drives," in IEEE Transactions on Power Electronics, vol. 34, no. 1, pp. 514-525, Jan. 2019, doi: 10.1109/TPEL.2018.2814056.
2 H. Wu, C. Gan, H. Wang, S. Wang, R. Qu and X. Liu, "Active Disturbance Rejection Speed Control With Double-Stage-ESO Considering Aperiodic and Periodic Disturbances for PMSM Drives," in IEEE Transactions on Industrial Electronics, doi: 10.1109/TIE.2024.3519622.
下面的仿真和实验都和理论相符,即,级联LESO是可以有效跟踪斜坡速度指令(或者斜坡负载扰动)且没有稳态误差的。
正是因为我把我仿真里面都做好了离散化,我才发现我第一篇论文里面的idea。当时在初步做仿真的时候,自己想出了一种调制算法,我发现这种调制算法很简单,而且跟一篇tie提出的调制算法"差不多"。后来把两种算法对应的仿真模型都改成离散化的,我惊喜的发现,这两种算法在仿真里面的THD竟然是一模一样的,没有任何的差距。
在网上大家接触到的绝大部分模型,都没有做任何关于控制器的离散化。这就很容易出现仿真能跑,但实验跑不通的情况,这会大幅延长各位的试错时间。如果等到研三才发现这个问题,那后面很多事都来不及了。这也是为什么我在知乎发了很多关于如何实现控制器离散化的模型或者文章。
https://www.zhihu.com/question/679186141/answer/3816169916
https://zhuanlan.zhihu.com/p/678697436
那怎么验证自己的模型有没有搭建正确呢?或者说,应该怎么样训练自己搭建模型的能力?
我的建议:
1.上文给了一个bilibili手把手教模型搭建的视频,新手小白可从上面的视频入手,搭建一个普通的速度电流PI双闭环的模型;
2.接着看看我的电机控制杂谈5,以及其后续篇,里面已经提供了控制器离散化后的模型供大家简单参考;
3.强烈建议自己搭建一个无差拍预测电流控制的模型!!!
为什么会建议搭建无差拍预测电流控制的模型:
理由1 **:**无差拍预测电流控制相当于在速度电流PI双闭环的模型上将电流环PI调节器改成无差拍预测电流控制,需要在原有算法上修改的内容少,且无差拍预测电流控制原理简单,容易入门。
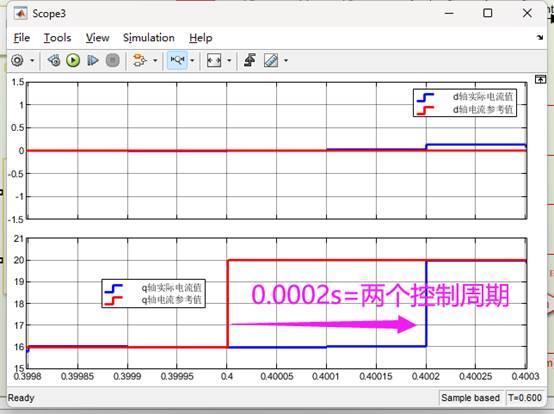
理由2 **:**无差拍预测电流控制具有一个极为特别的性质------在控制器中的电机参数(电感、磁链、电阻)与实际电机参数无差别且直流母线电压足够的情况下,实际电流会在两个控制周期后达到参考电流且没有超调!
如下图所示,q轴实际电流在0.4s是16A,q轴参考电流在0.4s突变为20A,q轴实际电流在两个控制周期后(也就是经过0.0002s)达到参考电流且没有超调。
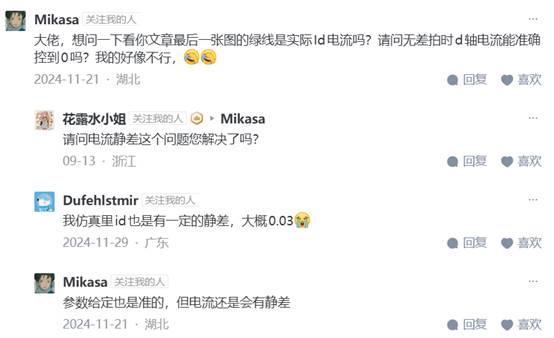
理由3 **:**无差拍预测电流控制对参数的依赖性、对模型的依赖性极强,但凡有一点延时补偿没做好或者建模没有建好,就会出现电流静差!
比如我的无差拍预测电流控制的帖子下,就有不少在讨论电流静差的情况。如下图所示。
综上所述,我认为无差拍预测电流控制,可以作为一份考卷,用于检测自身是否具备搭建离散化模型的能力。
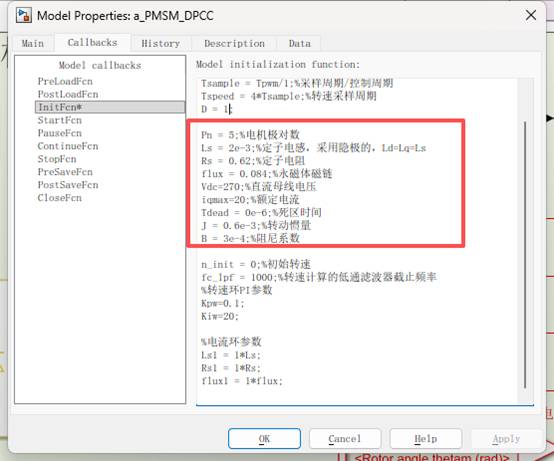
PS :无差拍预测电流控制如果是在载波比相对较低的情况下当然也会出现静差,但是对于大家一般实验的电机而言,还是很难出现静差的。例如我下面展示了五对极2000r/min ,10kHz 控制频率以及采样频率下的仿真波形,这时候的无差拍预测电流控制在稳态条件下是不会出现静差的。
PS:虽然在知乎上面发了不少关于控制器离散化的仿真搭建,但是很多同学都没有搞懂这个基础知识。后续计划开个"手把手教你搭建 Simulink 仿真"的专栏,同时把整个复现的过程全都用视频记录,让新手小白能够跟着视频进行算法的完整复现。由于时间有限,只能说尽力更新。
2循序渐进,由易入难
在知乎三年也遇到不少学生,心急的学生很多,能静下心来慢慢学的实在是太少。我甚至遇到过连Simulink都没有下载的,就说要学最复杂的算法。我都不知道说啥。
下面这是一个比较不错的同学,先是学习了传统的DPCC,然后自己去复现LESO-DPCC、LESO-MFPCC(基于LESO的无模型预测电流控制),然后再到增量DPCC,然后增量DPCC加电感辨识。一步一步循序渐进,慢慢争取复现、学习一些比较难的算法。

比如我上面发的自己的学习笔记,我从传统三相PMSM 做到开绕组PMSM ,而不是直接跳过传统PMSM。
我自己在仿真模型的搭建也是从简到难。 比如高性能16,这篇算法很复杂。我在这篇文章中的4.4节也阐述了复现的步骤。先把仿真算法拆解成几个可行的小步骤,然后再一步步验证,最后给拼起来。
https://zhuanlan.zhihu.com/p/719591343![]() https://zhuanlan.zhihu.com/p/719591343
https://zhuanlan.zhihu.com/p/719591343
3先入门,再创新
许多人没做过实验,甚至算法都还没开始学,只是来了一点相关文献就开始想着创新点。
先做实验,哪怕是PI实验,理解好整个电机控制系统的基本原理。
光看文献,也许有机会能找出创新点或者可以改进的点,但是这个概率比较小。论文里面并不会把所有细节都阐述清楚,有的问题需要你去做了仿真、实验你才会发现。
4先看,再思考,再做,再思考,最后吸收
期刊论文也好,知乎帖子、哔站视频也罢,一切内容都只能作为参考。绝对不应该完全相信任何说法,永远要保证一个辩证思维去看。比如现在我回过头去看我两年前发的贴子,我都觉得有点不忍直视了。。。只能给大家做个"简单"的参考呐,不是权威的参考~
我自己看论文,大概都是看思路,思路得当,我再考虑去复现,在复现文章时我基本没有完全按照文章的内容思路走,而是在仿真中去融合自己的想法。比如下面这两篇参数辨识的知乎,我基本上把我整个复现过程中的思考和想法全都写了下来,在仿真里面融入了很多自己的想法。
https://zhuanlan.zhihu.com/p/685863710![]() https://zhuanlan.zhihu.com/p/685863710
https://zhuanlan.zhihu.com/p/685863710
https://zhuanlan.zhihu.com/p/687206417![]() https://zhuanlan.zhihu.com/p/687206417
https://zhuanlan.zhihu.com/p/687206417
5有目标的去做事情
大家读硕士,
有的人是为了读个博走学术,那可以多多看些文献,跟着现在的学术前沿走;
有的人是为了进企业,那你可以考虑你想进什么样的企业。比如说你计划以后去与新能源汽车相关的企业,你可以选择学学车企相对感兴趣的算法,比如弱磁控制、断续PWM等;如果说你想去伺服机器人啥的,你可以去一些企业的官网上下载他们的伺服电机的说明手册,看看他们的产品中用了什么算法。例如下面是汇川SV680LN直驱电机伺服手册包,里面就写了他们的驱动器具备什么功能,那你自己可以花时间去网上搜些相关的算法,做做仿真做做实验,为自己秋招做好准备。
6多问问题,且要具备描述问题的能力
当时我本校的毕设指导老师为于子翔老师,于老师很年轻,很愿意回答我的问题。我有问题我都会发给他,他会迅速的解答,哪怕是在晚上11点。(能在秒回你问题的老师上哪找?非常推荐想去合工大读电机控制研究生的选择于老师。当然也欢迎想来985读电机控制研究生到我现导师这读研。)

当然,我自己问问题的前提是,我自己经过了较长时间的思考,且找了比较多的资料,始终没有结果,这时候我才会不好意思地麻烦老师。很多同学来问我问题,其实都没有经过自己的思考,也不上网搜资料,很多简单的问题在网上都被人回答了无数遍。
在知乎三年,遇到了很多学生,很多人都没办法把自己的问题给描述清楚。甚至有人直接扔一个波形问我是什么情况,且波形不给任何的纵坐标,也不说具体是什么数据(电流?转矩?转速?)。做问题探讨,一定要把问题描述清楚。
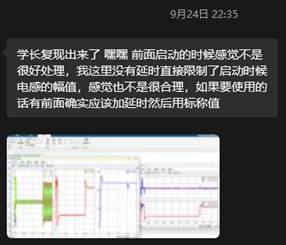
下面这是一位工程师咨询我问题时,发给我的内容。里面把问题、电机参数、转速描述的十分清楚,看一眼就知道大概是讲什么问题了。
7 电机 控制 与 驱动
以我个观点来看,电机驱动与控制这个方向可以分为三个分支。
第一个是偏向电机的控制,或者说是根据电机本身性质所做的一些控制方法。我谐波抑制专题12的方法就属于这一类。其次,比如说一些弱磁控制,一些基于信号注入的无位置控制,都是根据电机本体性质去设计的控制算法,都属于偏向电机的控制。这一类方法不需要太强的控制理论基础,需要较强的电机 电气 方面的基础。
https://zhuanlan.zhihu.com/p/1940525640072795213![]() https://zhuanlan.zhihu.com/p/1940525640072795213
https://zhuanlan.zhihu.com/p/1940525640072795213
第二个是纯控制,比如一些论文里面,只通过伯德图、离散域的零极点图等去设计控制器、分析控制器的性能,进而实现更好的电机性能表现。例如我高性能控制算法13对应的参考文献,都是根据伯德图分析控制器性能。这一类方法就需要很强的控制理论基础。
https://zhuanlan.zhihu.com/p/703039702![]() https://zhuanlan.zhihu.com/p/703039702
https://zhuanlan.zhihu.com/p/703039702
第三个是驱动,主要是关于逆变器部分。具体细分又可以分为逆变器硬件的设计和逆变器软件的调制。逆变器硬件的设计估计大家接触的都相对较少,逆变器软件的调制则是相对常见。比如三相的SVPWM就属于逆变器软件的调制算法。如果电机换为多相拓扑,或者多电平拓扑,再或者特殊工况(低载波比),逆变器软件的调制就有很多可玩的东西,当然有时候需要结合电机本身的特性去设计软件调制算法。这一类方法就需要比较好的电力电子基础。
https://zhuanlan.zhihu.com/p/13181076726![]() https://zhuanlan.zhihu.com/p/13181076726
https://zhuanlan.zhihu.com/p/13181076726
我个人更偏向于第一个类型,大家可以结合自己兴趣在这些细分的领域探索。
目前就想到这么多了(2025-10-24,01:43),后续想到别的再补充。