引言
本次学习的是一款与前面红外循迹模块原理很像的模块------红外避障模块,如下图所示。
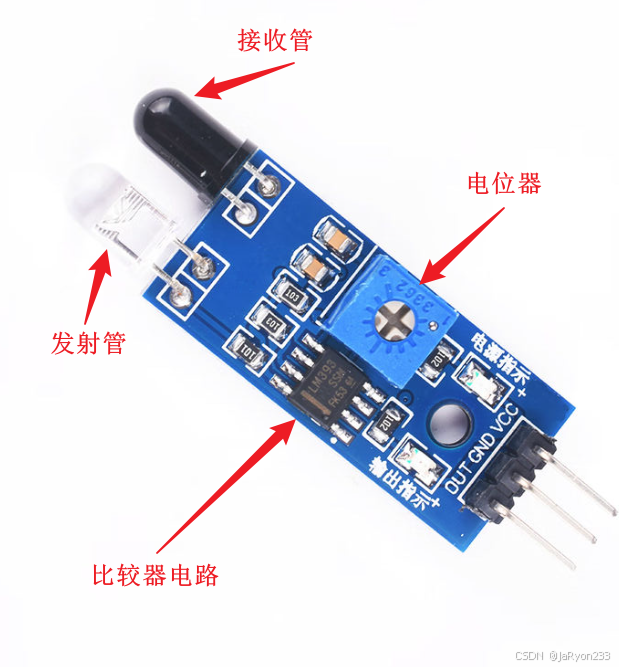
在避障小车等场景中常常可以看见。本次我们来简单学习一下其用法,并基于STM32实现一下对该模块的控制。
一、红外避障传感器介绍
根据厂家提供的对该传感器介绍的文档可知,该传感器模块具备较强的环境光线适应能力 ,核心配置为一对红外线发射与接收管,核心特性如下:
(1)检测机制:发射管发射特定频率的红外线,当检测方向存在障碍物(反射面)时,红外线经反射后被接收管捕获,再通过比较器电路处理;
(2)核心优势:干扰小、装配便捷、使用简单;
(3)适用场景:广泛应用于机器人避障、避障小车、流水线计数、黑白线循迹等场景。
二、相关参数介绍
(1)障碍物检测反馈:当模块检测到前方障碍物信号时,电路板上的绿色指示灯会随之点亮,同时 OUT 端口会持续输出低电平信号,以此明确反馈障碍物存在状态。
(2)检测范围与调节方式 :模块的有效检测距离为 2~30cm,检测角度为 35°;检测距离可通过电位器灵活调节,顺时针旋转电位器时,检测距离会增加,逆时针旋转电位器时,检测距离则会减少。
(3)目标特性对探测的影响 :该传感器采用主动红外线反射探测原理 ,目标的反射率和形状是影响探测距离的关键因素。其中,反射率方面,黑色目标的探测距离最小,白色目标的探测距离最大;形状方面,小面积物体的探测距离较小,大面积物体的探测距离较大。
(4)连接与驱动兼容性:传感器模块的输出端口 OUT 具备灵活的连接方式,可直接与单片机的 IO 口连接,也能直接驱动 5V 继电器;标准连接逻辑为 VCC 与外部电源 VCC 对接、GND 与外部电源 GND 对接、OUT 与单片机 IO 口对接。
(5)核心元器件与稳定性:模块内置 LM393 比较器,该元器件能有效保障模块在工作过程中的稳定性,减少信号干扰导致的误判问题。
(6)供电与电源指示:模块支持 3-5V 直流电源供电,适配多种常见电源规格;当电源成功接通后,电路板上的红色电源指示灯会点亮,直观提示模块供电状态。
(7)电位器预设与使用提醒:每个模块在出厂发货前,均已通过电位器调节好阈值比较电压,确保默认状态下的稳定工作;非特殊需求或专业调试场景,请勿随意调节电位器,避免影响模块检测精度。
三、引脚定义及功能介绍
| 接口标识 | 功能说明 |
|---|---|
| VCC | 外接 3.3V-5V 电压,可直接与 5V 单片机或 3.3V 单片机连接 |
| GND | 外接电源地(GND) |
| OUT | 模块数字量输出接口,输出信号为 0(低电平)或 1(高电平) |
这样看,使用STM32控制红外避障模块就比较简单了,只需要接收模块通过OUT引脚对外输出的电平,然后判断一下:高电平-无障碍,低电平-有障碍。
四、参考代码
经过上述原理介绍可知,其应用逻辑还是很简单的,下面给出参考代码,这是基于STM32F103系列单片机,寄存器方式编写的。
4.1 ir_obstacle.h
cpp
#ifndef __IR_OBSTACLE_H
#define __IR_OBSTACLE_H
#include "stm32f10x.h"
/**
* 引脚接线
*
* VCC ---> 3.3/5V
* GND ---> GND
* OUT ---> PA0
*
*/
// 宏定义
#define IS_OBSTACLE (1)
#define NOT_OBSTACLE (0)
void IR_Obstacle_Init(void);
uint8_t IR_Obstacle_Detect(void);
#endif
/*** (C) COPYRIGHT 2025 END OF FILE ***/4.2 ir_obstacle.c
cpp
/*
* @Descripttion: 红外避障模块驱动文件(.c)
* @Author: JaRyon
* @version:
* @Date: 2025-10-27 19:20:21
*/
#include "ir_obstacle.h"
/**
* @brief 红外避障模块初始化(.c)
* @param void 无
* @return void
* @example IR_Obstacle_Init();
* @attention
*/
void IR_Obstacle_Init(void)
{
// 控制端口的初始化 PA0
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN;
// 浮空输入 mode-00 cnf-01
GPIOA->CRL &= ~GPIO_CRL_MODE0;
GPIOA->CRL &= ~GPIO_CRL_CNF0_1;
GPIOA->CRL |= GPIO_CRL_CNF0_0;
}
/**
* @brief 输出红外避障模块检测结果 有障碍-0 无障碍-1
* @param void 无
* @return uint8_t
* @example uint8_t Res = IR_Obstacle_Detect();
* @attention
*/
uint8_t IR_Obstacle_Detect(void)
{
return (GPIOA->IDR & GPIO_IDR_IDR0) ? NOT_OBSTACLE : IS_OBSTACLE;
}4.3 main.c
cpp
/*
* @Descripttion: 红外避障模块测试代码
* @Author: JaRyon
* @version:
* @Date: 2025-10-25 23:10:52
*/
#include "stm32f10x.h"
#include "LED.h"
#include "ir_obstacle.h"
int main(void)
{
// 初始化
LED_Init(); // LED
IR_Obstacle_Init(); // 红外避障
while(1)
{
// 有障碍LED1点亮
if (IR_Obstacle_Detect() == IS_OBSTACLE)
LED_On(LED1);
else
LED_Off(LED1);
}
}主程序测试代码很简单,就是有障碍的时候点亮某一个LED。
五、小结
本次,我们介绍了红外避障模块的工作原理及基于STM32的应用实现。该模块通过红外发射与接收管检测障碍物,具有2-30cm可调检测范围,输出高低电平信号分别表示有无障碍。
文中详细说明了模块参数、引脚定义,并提供了STM32驱动代码示例,包括初始化配置和检测函数实现。测试代码通过LED灯直观显示检测结果,当检测到障碍物时点亮LED。
以上便是本次文章的所有内容,欢迎各位朋友在评论区讨论,本人也是一名初学小白,愿大家共同努力,一起进步吧!
鉴于笔者能力有限,难免出现一些纰漏和不足,望大家在评论区批评指正,谢谢!