目录
[GRPO 是"隐藏 PRM"](#GRPO 是“隐藏 PRM”)
[步骤 1:构建过程集 B(G)(共享前缀的轨迹子集)](#步骤 1:构建过程集 B(G)(共享前缀的轨迹子集))
[步骤 2:确定每个过程集的起止点 s(λ) 和 e(λ)](#步骤 2:确定每个过程集的起止点 s(λ) 和 e(λ))
[步骤 3:计算过程集的步骤级奖励 R^(λ)](#步骤 3:计算过程集的步骤级奖励 R^(λ))
[步骤 4:确定每个令牌的步骤级奖励 Ri,t](#步骤 4:确定每个令牌的步骤级奖励 Ri,t)
[1. 先明确指标与 "共享前缀" 的核心关联](#1. 先明确指标与 “共享前缀” 的核心关联)
[2. 验证奖励饱和 = 模型收敛到局部最优策略](#2. 验证奖励饱和 = 模型收敛到局部最优策略)
[3. 共享前缀的 "量" 和 "层级" 随收敛同步提升](#3. 共享前缀的 “量” 和 “层级” 随收敛同步提升)
GRPO 是"隐藏 PRM"
这段数学介绍太难懂了,翻译成例子理解
下面通过一个具体例子,逐步演示过程集(B (G))、步骤级奖励(Rᵢ,ₜ)和步骤级优势(Aᵢ,ₜ)的计算过程,帮助理解 GRPO 中隐藏 PRM 的工作机制。(PRM: 过程奖励模型)
场景设定
假设我们有一个轨迹集合 G={g(1),g(2),g(3)},每条轨迹是由令牌(如字母)组成的序列,且每条轨迹有一个结果级奖励(最终整体奖励):
- g(1)=a,b,c,d,结果奖励 r1=8
- g(2)=a,b,e,f,结果奖励 r2=6
- g(3)=a,b,e,g,结果奖励 r3=4
步骤 1:构建过程集 B(G)(共享前缀的轨迹子集)
过程集 λ⊆G 是 "共享相同前缀的轨迹集合"。根据定义,我们先找到所有可能的 λ,并确定它们的树结构(由包含关系 ⊇ 诱导)。
分析共享前缀:
- 所有 3 条轨迹的前 2 个令牌均为 a,b(即前缀长度 n=2 时完全相同),因此 λ0={g(1),g(2),g(3)}(根节点)。
- g(2) 和 g(3) 的前 3 个令牌均为 a,b,e(前缀长度 n=3 时相同),因此 λ1={g(2),g(3)}(λ0 的子节点)。
- 每条轨迹自身是 "仅包含自己的过程集"(叶子节点):λ2={g(1)},λ3={g(2)},λ4={g(3)}。
步骤 2:确定每个过程集的起止点 s(λ) 和 e(λ)
- e(λ):该集合中所有轨迹共享的最长前缀的长度(最大 n)。
- s(λ):父节点的 e(λ)(根节点的 s(λ)=0)。
计算结果:
| 过程集 λ | 共享前缀 | e(λ)(最长前缀长度) | 父节点 | s(λ)(父节点的 e) |
|---|---|---|---|---|
| λ0=G | a,b | 2(前 2 个令牌相同) | 根节点(无父) | 0 |
| λ1={g(2),g(3)} | a,b,e | 3(前 3 个令牌相同) | λ0 | e(λ0)=2 |
| λ2={g(1)} | a,b,c,d | 4(自身全长) | λ0 | e(λ0)=2 |
| λ3={g(2)} | a,b,e,f | 4(自身全长) | λ1 | e(λ1)=3 |
| λ4={g(3)} | a,b,e,g | 4(自身全长) | λ1 | e(λ1)=3 |
步骤 3:计算过程集的步骤级奖励 R^(λ)
R^(λ) 是该集合中所有轨迹的平均结果级奖励:
- R^(λ0)=3r1+r2+r3=(8+6+4)/3=6
- R^(λ1)=2r2+r3=(6+4)/2=5
- R^(λ2)=1r1=8
- R^(λ3)=1r2=6
- R^(λ4)=1r3=4
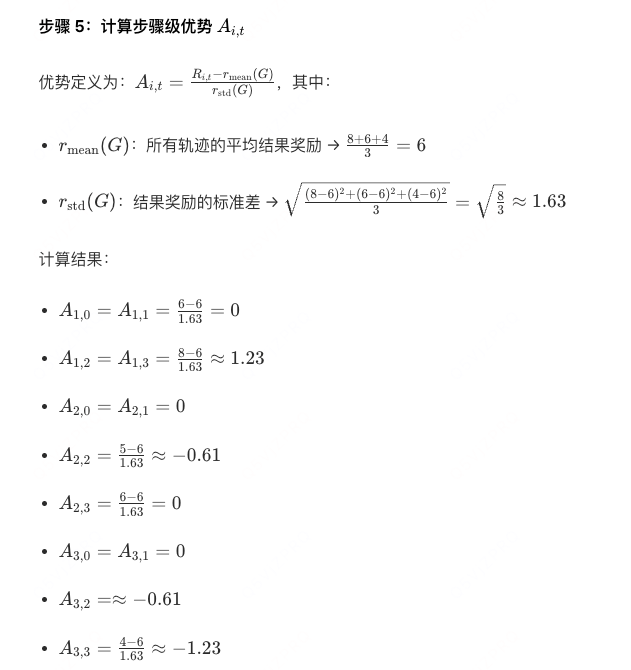
步骤 4:确定每个令牌的步骤级奖励 Ri,t
每个令牌 gt(i)(第 i 条轨迹的第 t 个令牌,t 从 0 开始)属于唯一的过程集 λ(i,t),其奖励 Ri,t=R^(λ(i,t))。
具体分配(结合 s(λ)≤t<e(λ) 规则):
-
g(1) 的令牌:
- t=0,1:属于 λ0(0≤t<2)→ R1,0=R1,1=6
- t=2,3:属于 λ2(2≤t<4)→ R1,2=R1,3=8
-
g(2) 的令牌:
- t=0,1:属于 λ0 → R2,0=R2,1=6
- t=2:属于 λ1(2≤t<3)→ R2,2=5
- t=3:属于 λ3(3≤t<4)→ R2,3=6
-
g(3) 的令牌:
- t=0,1:属于 λ0 → R3,0=R3,1=6
- t=2:属于 λ1 → R3,2=5
- t=3:属于 λ4 → R3,3=4
总结
这个例子清晰展示了:
- 如何通过 "共享前缀" 划分过程集 B(G),形成树结构;
- 如何基于过程集计算步骤级奖励(将结果奖励 "分解" 到中间步骤);
- 如何通过优势函数将步骤奖励标准化,用于 GRPO 的损失计算。
这正是 GRPO "隐藏 PRM" 的核心:无需人工标注中间步骤奖励,而是通过轨迹间的重叠前缀自动生成步骤级信号。
GRPO存在的问题
从过程集划分\(X_t\)的角度来看 GRPO 的目标函数(参见式 6),我们注意到:每条轨迹在索引t处对损失的贡献,与过程集
中其他所有轨迹的贡献相同(其中
,
的定义见式 5)。
每个过程集对总损失的贡献
会被\(|\lambda|\)(集合大小)缩放:这存在损害探索(当
时)和利用(当
时)的风险。
考虑某个的过程集\(\lambda\):
- 若
,则 GRPO 下策略
- 相反,若
为说明这一点,考虑图 1 中的组G,假设\(r_1 = r_2 = r_6 = 0.5\),\(r_4 = r_5 = 0\),\(r_3 = 1\),且令。此时
:尽管\(g^{(3)}\)的奖励最高,但在 GRPO 目标函数下,子轨迹\(g^{(3)}_{:4}\)的概率会降低,进而降低生成补全结果\(g^{(3)}\)的整体可能性。式 7 中的
项会将这种概率降低幅度放大 3 倍(因\(|\lambda| = 3\))。
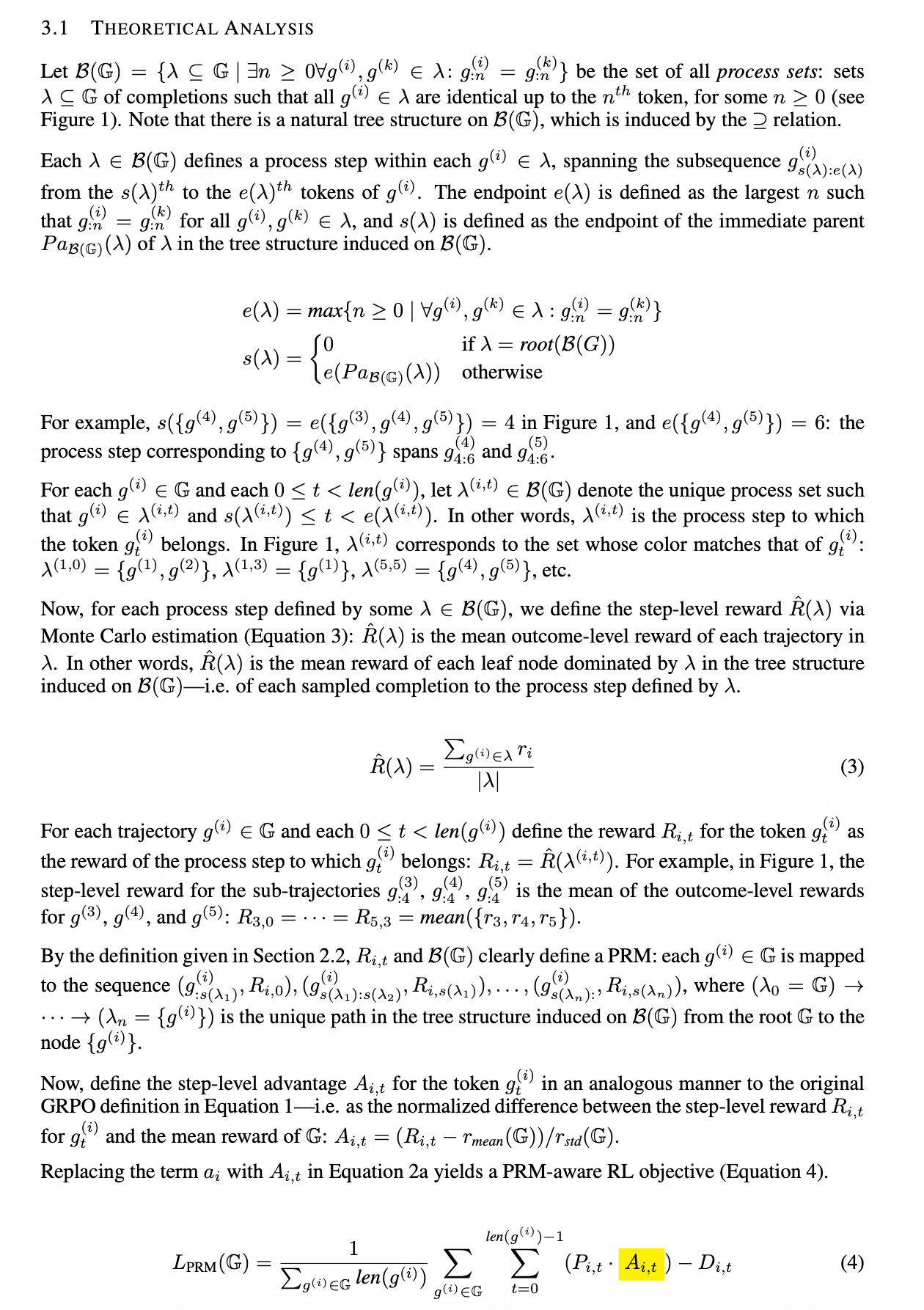
我们提议将令牌级损失按
缩放(即\(\lambda\)-GRPO;式 8):这能抵消式 7 中的\(|\lambda|\)项,使每个过程集在索引t处对损失的贡献相等。
核心逻辑说明
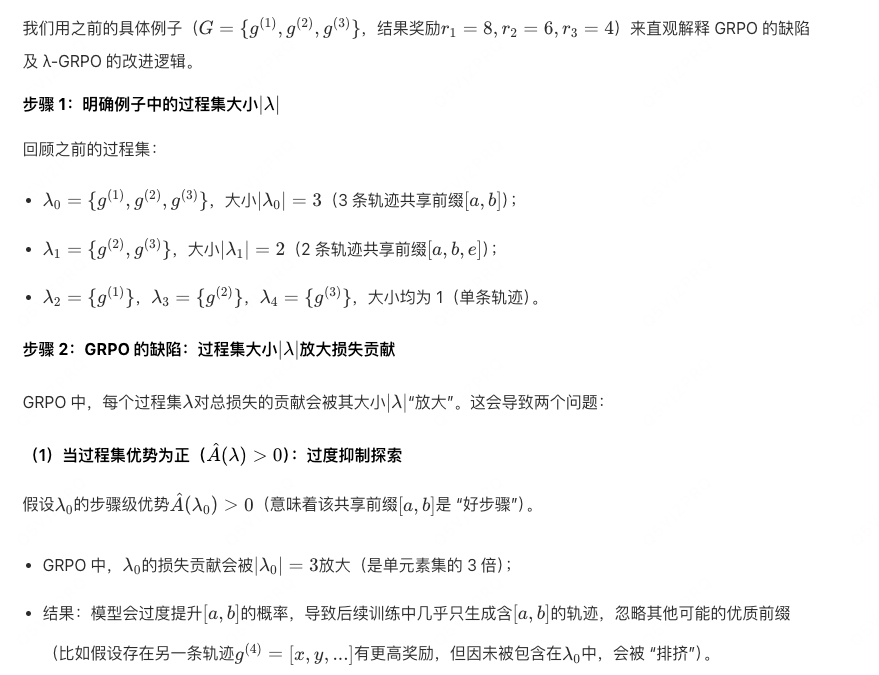
GRPO 原目标函数中,过程集的损失贡献会被其大小\(|\lambda|\)放大,导致:
- 大集合的正优势会过度抑制探索(只聚焦该集合);
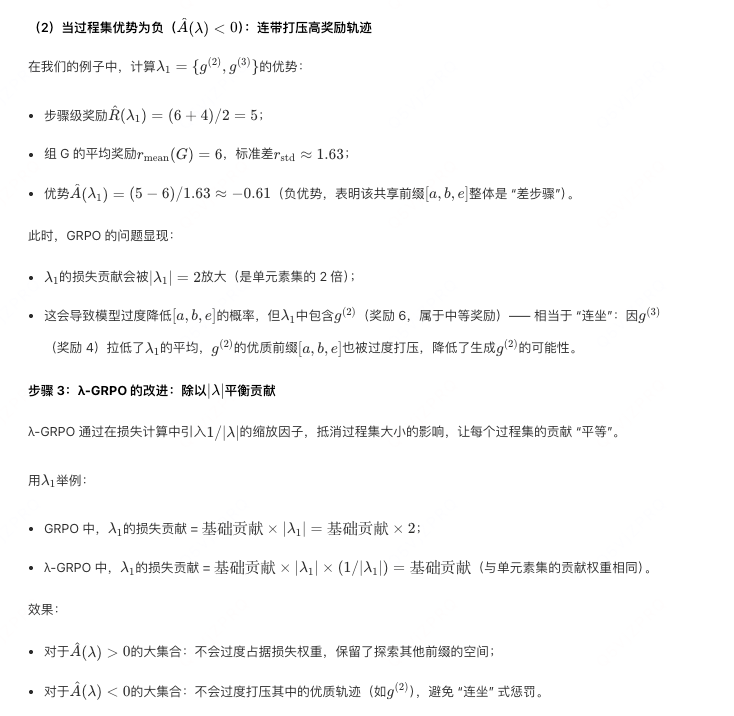
- 大集合的负优势会过度打压其中的高奖励轨迹(连带着好轨迹一起被削弱)。
通过引入
的缩放因子,平衡了不同大小过程集的损失贡献,解决了上述缺陷。
例子:
总结
在我们的例子中,GRPO 因的放大效应,会对含 2 条轨迹的\(\lambda_1\)过度惩罚,连带降低中等奖励轨迹
的概率;而 λ-GRPO 通过除以\(|\lambda|\),让每个过程集的损失贡献不受大小影响,既保护了探索,也避免了对优质轨迹的误打压。这就是 λ-GRPO 能提升性能和训练速度的核心原因。
实验结果:
图 2 显示,对于组大小为 6 和 36 的两种情况,随着验证奖励趋于饱和,路径深度和中间比例均大幅提升。随着 GRPO 训练的推进,熵会急剧降低。这表明,当模型收敛到局部最优策略时,会产生越来越丰富的、能诱导 PRM 的结构。
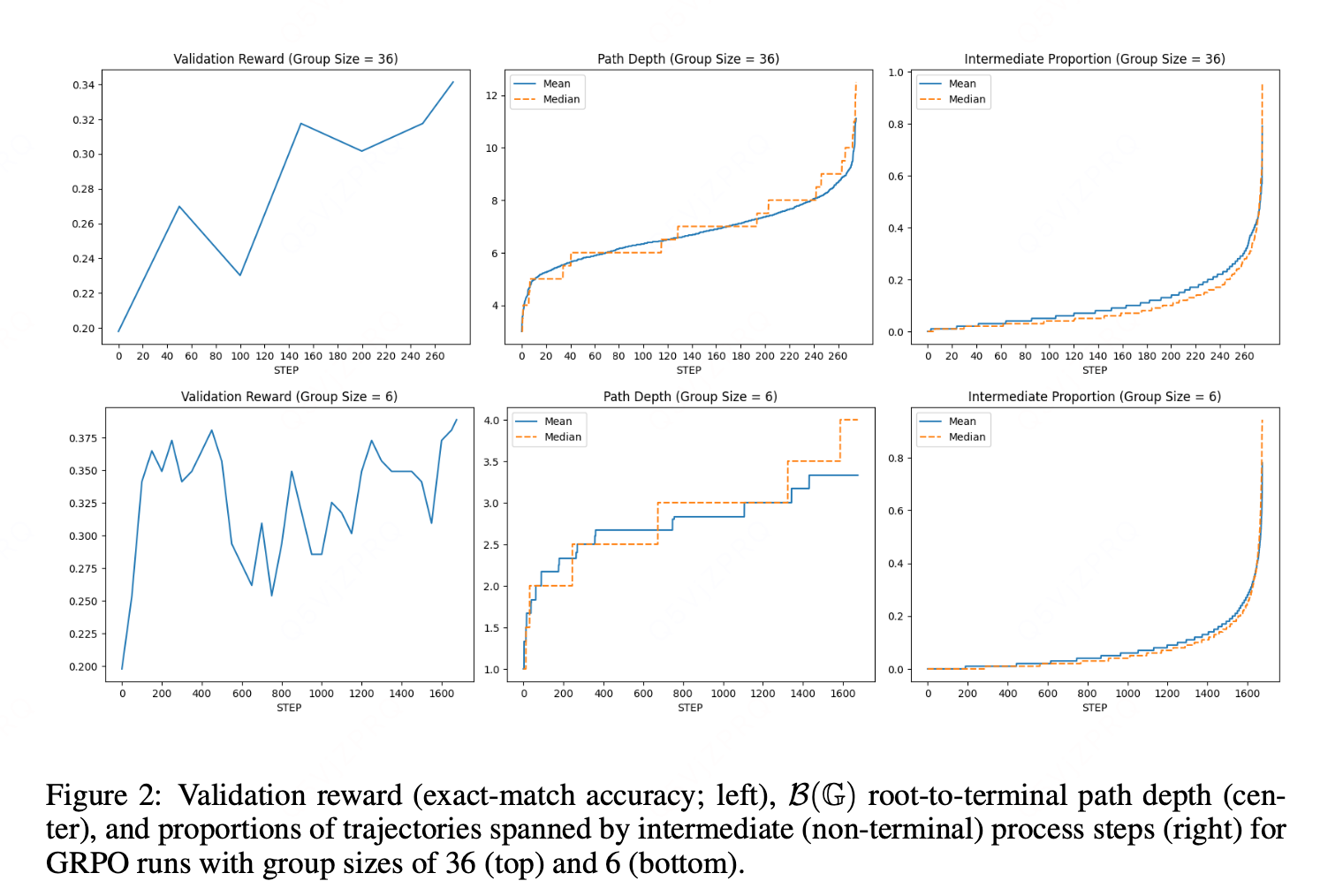
1. 先明确指标与 "共享前缀" 的核心关联
- 路径深度:B (G) 树中根节点到终端节点的中间节点数,本质反映 "共享前缀的层级丰富度"------ 层级越多(比如先共享前 2 个令牌,再共享前 3 个令牌),路径越深。
- 中间比例:轨迹中属于 "中间过程步骤" 的令牌占比,本质反映 "共享前缀覆盖的令牌长度"------ 共享前缀越长,中间步骤覆盖的令牌越多,比例越高。
两者的共同驱动因素是:训练后期模型生成的轨迹,共享前缀越来越多、层级越来越深。
2. 验证奖励饱和 = 模型收敛到局部最优策略
验证奖励饱和意味着模型不再盲目探索,而是找到了 "能稳定拿到高奖励的有效路径"------ 此时模型生成的轨迹不再杂乱无章,而是聚焦于少数几条最优推理 / 生成路径。
这一点也得到了 Yu 等人(2025)的熵值结果支持:训练推进时熵急剧降低,熵越低说明轨迹的 "确定性越强"(不同轨迹之间的差异越小),越容易形成共享前缀。
3. 共享前缀的 "量" 和 "层级" 随收敛同步提升
- 初期训练(奖励未饱和):模型还在探索不同路径,轨迹差异大,大多只有短而浅的共享前缀(比如仅前 1-2 个令牌相同),甚至没有共享前缀。此时路径深度浅(中间节点少),中间比例低(共享前缀覆盖的令牌少)。
- 后期训练(奖励饱和) :模型收敛到最优路径后,绝大多数轨迹都会遵循 "相同的初始步骤→相似的中间步骤→不同的细节收尾" 模式。这会带来两个变化:
- 共享前缀的 "长度变长":比如从仅共享前 2 个令牌,变成共享前 5 个令牌,中间步骤覆盖的令牌数增多,导致中间比例提升;
- 共享前缀的 "层级变深":比如先有 "所有轨迹共享前 2 个令牌" 的上层过程集,再在其中分化出 "部分轨迹共享前 5 个令牌" 的下层过程集,中间节点增多,导致路径深度提升。
总结
验证奖励饱和的本质是模型 "找到并聚焦于有效路径",轨迹从 "杂乱探索" 变成 "有序收敛"。这种收敛带来了更丰富的共享前缀结构(更长、层级更多),而路径深度和中间比例正是衡量这种结构丰富度的直接指标 ------ 因此两者会随奖励饱和大幅提升。
问题: 需要遍历轨迹来计算吧?