《CenterNet: Keypoint Triplets for Object Detection》
这是一篇2019年发布在计算机视觉会议上的一篇论文,论文最主要的贡献是提出了一种无锚框的目标检测方法
1. 研究背景与动机
-
传统方法的局限性:基于锚点(anchor-based)的目标检测方法需要大量的锚点来确保与真实目标的高交并比(IoU),但这种方法存在计算成本高、锚点与卷积特征对齐问题等缺点。
-
关键点检测方法的不足:CornerNet 是一种基于关键点的目标检测方法,通过检测目标的两个角点(左上角和右下角)来构建目标边界框。然而,CornerNet 无法评估边界框内部的视觉模式,导致生成大量错误的边界框。
2. CenterNet 方法
-
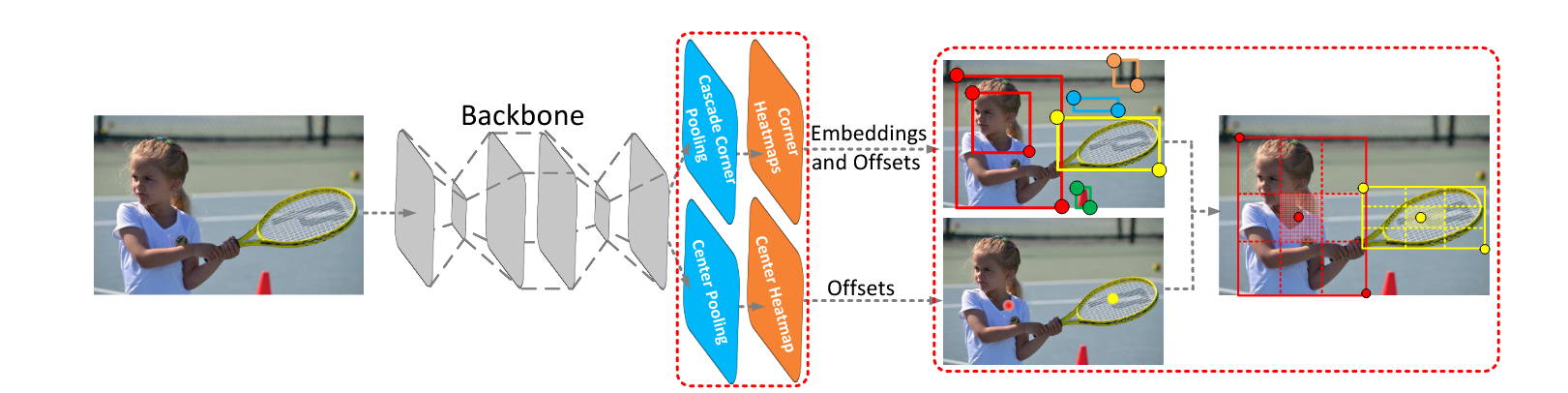
核心思想:CenterNet 通过引入一个额外的中心关键点,将目标检测从角点对(pair)扩展到关键点三元组(triplet),即一个中心关键点和两个角点。这种方法不仅保留了一阶段检测器(one-stage detector)的效率,还部分继承了两阶段检测器(two-stage detector)的功能。
-
关键模块:
-
中心池化(Center Pooling):通过在水平和垂直方向上取最大值,增强中心关键点的视觉模式,使其更容易被检测。
-
级联角池化(Cascade Corner Pooling):在边界方向和内部方向上取最大值,使角点能够获取目标内部的视觉模式,从而提高角点检测的鲁棒性。
-
-
中心区域检测 :定义了一个可伸缩的中心区域,用于检测边界框内的中心关键点。如果检测到与边界框类别相同的中心关键点,则保留该边界框。
传统的目标检测是生成多个候选框后基于回归计算得到最终的候选框,无锚点方法首先检测目标的左上角和右下角的点,然后通过角点的组合形成检测框或者直接检测物体的中心区域和边界信息来移除预定义的锚框