
- 深度学习SLAM基础理论
1.1 传统SLAM的局限性

1.2 深度学习SLAM分类
深度学习SLAM 模块增强 端到端系统 深度特征 深度匹配 深度建图 位姿回归 场景流估计
1.3 监督与自监督学习
· 监督学习:

· 自监督学习:

- 深度特征提取与匹配
2.1 SuperPoint 架构
python
class SuperPoint(nn.Module):
def __init__(self):
super().__init__()
# 共享编码器
self.encoder = nn.Sequential(
nn.Conv2d(1, 64, 3, padding=1),
nn.ReLU(),
nn.Conv2d(64, 64, 3, padding=1),
nn.ReLU(),
nn.MaxPool2d(2),
... # 4层下采样
)
# 特征点检测头
self.detector = nn.Conv2d(128, 256, 3, padding=1)
# 描述子提取头
self.descriptor = nn.Conv2d(128, 256, 3, padding=1)
def forward(self, x):
features = self.encoder(x) # [B, 128, H/8, W/8]
detections = self.detector(features) # [B, 256, H/8, W/8]
descriptors = self.descriptor(features) # [B, 256, H/8, W/8]
return detections, descriptors 2.2 SuperGlue 匹配机制
python
class SuperGlue(nn.Module):
def __init__(self):
super().__init__()
# 图神经网络层
self.gnn = nn.ModuleList([AttentionalGNN(256) for _ in range(9)])
# 匹配层
self.final_proj = nn.Conv1d(256, 256, 1)
def forward(self, desc0, desc1):
# 初始化图节点
nodes0 = desc0.permute(0,2,3,1).flatten(1,2)
nodes1 = desc1.permute(0,2,3,1).flatten(1,2)
# 多轮图传播
for layer in self.gnn:
nodes0, nodes1 = layer(nodes0, nodes1)
# 计算匹配分数
scores = torch.einsum('bdn,bdm->bnm', nodes0, nodes1)
scores = scores / 256**0.5
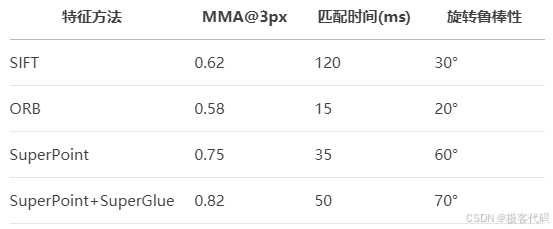
return scores 2.3 性能对比
- 端到端位姿估计
3.1 PoseNet 架构
python
class PoseNet(nn.Module):
def __init__(self):
super().__init__()
self.encoder = resnet34(pretrained=True)
self.pose_regressor = nn.Sequential(
nn.Linear(512, 2048),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(2048, 7) # [tx, ty, tz, qw, qx, qy, qz]
)
def forward(self, x):
features = self.encoder(x)
pose = self.pose_regressor(features)
return pose 3.2 几何一致性损失
python
def geometric_consistency_loss(T1, T2, points):
"""计算两组位姿对点云的几何一致性"""
# 变换点云
points1 = transform_points(points, T1)
points2 = transform_points(points, T2)
# 计算倒角距离
dist1 = pointcloud_distance(points1, points2)
dist2 = pointcloud_distance(points2, points1)
return (dist1.mean() + dist2.mean()) / 2 3.3 时空一致性训练
python
def train_vo(model, sequence_loader):
for images in sequence_loader: # [B, T, C, H, W]
poses = []
for t in range(images.shape[1]-1):
# 估计相邻帧位姿
pose_t = model(images[:, t])
pose_t1 = model(images[:, t+1])
poses.append(pose_t)
# 计算光度损失
warped = warp_image(images[:, t+1], pose_t1.inverse() @ pose_t)
loss_photo = photometric_loss(images[:, t], warped)
# 计算几何一致性损失
loss_geo = geometric_consistency_loss(pose_t, pose_t1, depth[:, t])
# 联合优化
loss = loss_photo + 0.5 * loss_geo
loss.backward()
optimizer.step() - 神经辐射场(NeRF)建图
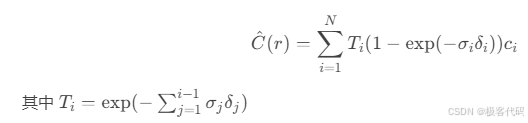
4.1 NeRF核心方程
· 体积渲染:
4.2 Instant-NGP 实现
python
class InstantNGP(nn.Module):
def __init__(self):
super().__init__()
# 多分辨率哈希编码
self.embedder = HashEmbedder(
num_levels=16,
log2_hashmap_size=19,
per_level_scale=2
)
# 轻量MLP
self.mlp = TinyMLP(
input_dim=32,
output_dim=4, # RGB + density
hidden_dim=64,
num_layers=2
)
def forward(self, x, d):
# 位置编码
pos_enc = self.embedder(x)
# 方向编码
dir_enc = sh_encoder(d, degree=2)
# 网络推理
h = self.mlp(torch.cat([pos_enc, dir_enc], dim=-1))
rgb = torch.sigmoid(h[..., :3])
density = torch.relu(h[..., 3])
return rgb, density 4.3 SLAM与NeRF融合
python
class NeRF_SLAM:
def __init__(self):
self.nerf = InstantNGP()
self.pose_estimator = DeepVO()
self.keyframes = []
def add_frame(self, rgb, depth):
# 估计当前位姿
pose = self.pose_estimator(rgb)
# 选择关键帧
if self._is_keyframe(pose):
self.keyframes.append((rgb, depth, pose))
# 更新NeRF
self._update_nerf()
def _update_nerf(self):
# 从关键帧采样光线
rays = sample_rays_from_keyframes(self.keyframes)
# 训练NeRF
for _ in range(10): # 每帧10次迭代
rgb_pred, density_pred = self.nerf(rays.origins, rays.directions)
loss = photometric_loss(rgb_pred, rays.rgb)
loss.backward()
optimizer.step() - 语义SLAM融合
5.1 语义建图架构
RGB图像 语义分割 深度图 点云生成 语义点云 语义地图 物体识别 场景理解
5.2 动态物体过滤
python
def filter_dynamic_objects(points, semantics, mask):
"""基于语义和运动信息过滤动态物体"""
# 静态物体类别
static_classes = ['wall', 'floor', 'ceiling', 'furniture']
# 创建掩码
static_mask = np.isin(semantics, static_classes)
motion_mask = mask < 0.1 # 光流运动小
# 组合掩码
valid_mask = static_mask & motion_mask
return points[valid_mask] 5.3 语义引导回环检测
python
def semantic_loop_detection(query, database):
"""基于语义场景图的回环检测"""
# 构建场景图
query_graph = build_scene_graph(query['objects'])
best_score = -1
best_id = -1
for i, db in enumerate(database):
# 图匹配
graph_similarity = graph_match(query_graph, db['graph'])
# 几何验证
inlier_ratio = geometric_verification(query['points'], db['points'])
# 综合分数
score = 0.7 * graph_similarity + 0.3 * inlier_ratio
if score > best_score:
best_score = score
best_id = i
return best_id, best_score - 实例:单目深度估计与位姿联合学习
6.1 网络架构
python
class DepthPoseNet(nn.Module):
def __init__(self):
super().__init__()
# 共享编码器
self.encoder = resnet50(pretrained=True)
# 深度解码器
self.depth_decoder = nn.Sequential(
nn.Conv2d(2048, 1024, 3, padding=1),
nn.Upsample(scale_factor=2),
... # 逐步上采样
nn.Conv2d(64, 1, 3, padding=1) # 深度图
)
# 位姿解码器
self.pose_decoder = nn.Sequential(
nn.AdaptiveAvgPool2d(1),
nn.Flatten(),
nn.Linear(2048, 7)
)
def forward(self, src, tgt):
# 提取特征
feat_src = self.encoder(src)
feat_tgt = self.encoder(tgt)
# 预测深度
depth_src = self.depth_decoder(feat_src)
# 预测位姿
pose = self.pose_decoder(torch.cat([feat_src, feat_tgt], dim=1))
return depth_src, pose 6.2 自监督损失函数
python
def compute_loss(src, tgt, depth, pose):
"""计算自监督损失"""
# 重建目标帧
warped_tgt = warp_image(src, depth, pose, K)
# 光度损失
loss_photo = photometric_loss(tgt, warped_tgt)
# 深度平滑损失
loss_smooth = depth_smoothness(depth, src)
# 深度一致性损失
warped_depth = warp_depth(depth, pose)
loss_consist = depth_consistency_loss(warped_depth, tgt_depth)
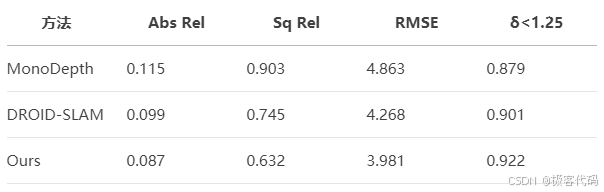
return loss_photo + 0.1 * loss_smooth + 0.5 * loss_consist 6.3 KITTI 基准测试
- 前沿进展:生成式SLAM
7.1 扩散模型建图
python
class DiffusionMapper(nn.Module):
def __init__(self):
super().__init__()
self.diffusion = LatentDiffusion(
unet_config,
autoencoder_config
)
self.condition_encoder = CLIPEncoder()
def update_map(self, image, pose):
# 编码观测
cond = self.condition_encoder(image)
# 扩散过程
latents = self.diffusion.sample(
cond,
timesteps=50,
guidance_scale=3.0
)
# 更新地图
self.global_map = self.diffusion.decode(latents) 7.2 语言引导导航
python
def language_guided_slam(instruction, scene):
"""语言引导的SLAM"""
# 编码语言指令
text_emb = text_encoder(instruction)
# 编码场景
scene_emb = scene_encoder(scene)
# 路径生成
path = path_generator(text_emb, scene_emb)
# 执行导航
for pose in path:
move_to(pose)
update_map(current_view()) 7.3 多模态神经地图
python
class MultiModalMap(nn.Module):
def __init__(self):
super().__init__()
self.map_embedding = nn.Embedding(100000, 256) # 地图网格嵌入
self.fusion = TransformerFusion(256)
def update(self, vision, lidar, audio, pose):
# 编码多模态数据
vis_feat = vision_encoder(vision)
lidar_feat = lidar_encoder(lidar)
audio_feat = audio_encoder(audio)
# 融合特征
fused_feat = self.fusion(vis_feat, lidar_feat, audio_feat)
# 更新地图
map_idx = pose_to_index(pose)
self.map_embedding.weight[map_idx] = fused_feat 关键理论总结
- 深度特征:SuperPoint/SuperGlue超越传统特征
- 端到端位姿:PoseNet与自监督VO实现直接估计
- 神经建图:NeRF实现逼真场景重建
- 语义融合:场景理解提升SLAM鲁棒性
- 生成模型:扩散模型开启建图新范式
下篇预告:第八篇:多传感器融合SLAM------鲁棒性的终极答案
将深入讲解:
· 传感器时空标定理论
· 卡尔曼滤波与因子图融合
· 多传感器紧耦合优化
· 故障检测与容错机制