REF:基于多传感器融合的救援机器人SLAM地图重建与路径规划研究
1. 系统设计
-
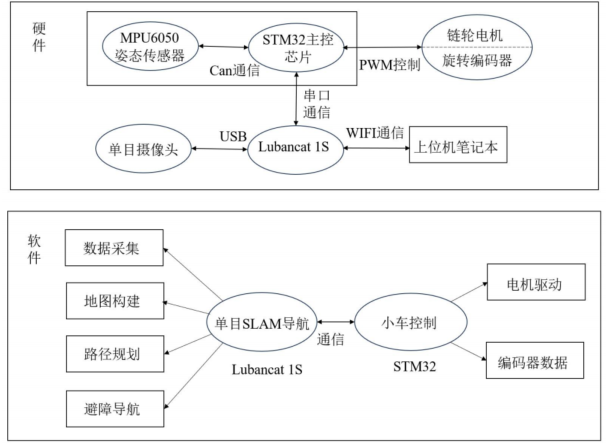
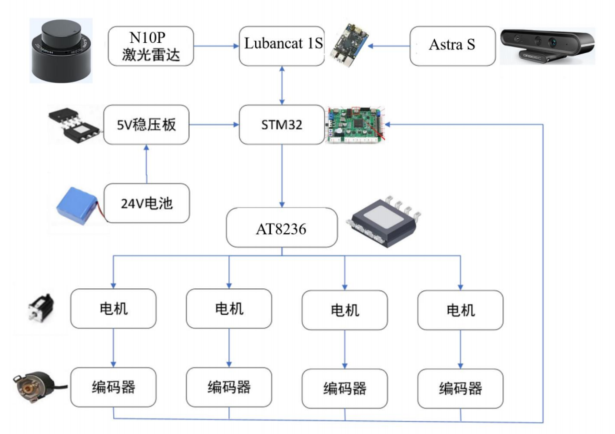
硬件
-
软件
-
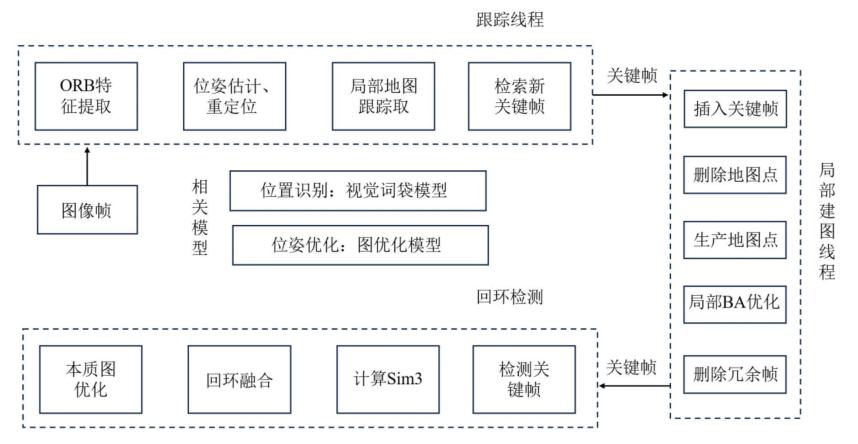
ORB-SLAM2 建图算法
-
导航算法
2. 改进SLAM建图
-
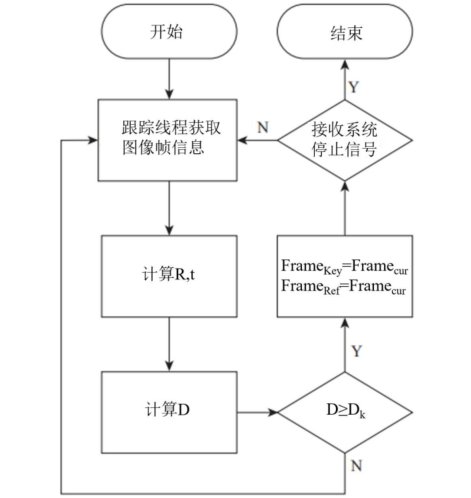
改进 ORB-SLAM2 建图算法:在原有运动估计模型中引入两个关键优化因子,通过平移变换因数和转角综合变换因数作为双因素评价机制,平移变换因数与转角综合变换因数之间满足互不影响

其中:
-
α\alphaα:是平移变换因数,随着摄像头平移量增大而变大,两者呈线性正相关
-
β+γ\beta + \gammaβ+γ:是转角综合变换因数,由两个独立分量组成
-
β\betaβ:左旋转变换因数,表示相机向左旋转的程度,随左转角度增加而增大,当无左转时为 0,在(−π2,0)( -\frac{\pi}2 , 0)(−2π,0)范围内有效
-
γ\gammaγ:右旋转变换因数,表征相机向右旋转的程度,随右转角度增加而增大,当无右转时为 0,在(0,π2)(0,\frac{\pi}2)(0,2π)范围内有效
-
-
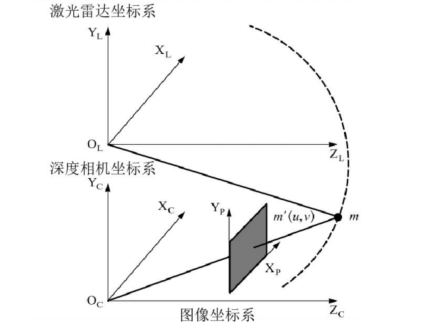
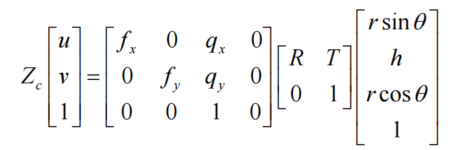
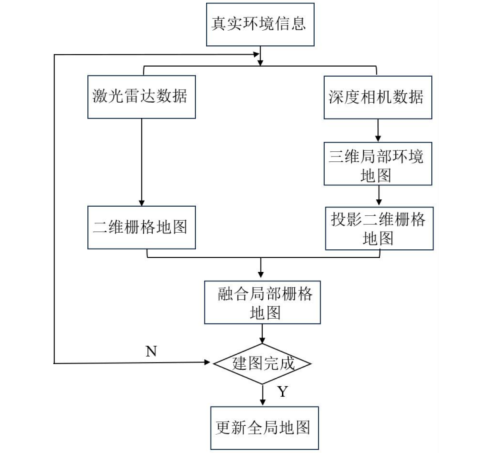
激光雷达与深度相机联合标定:深度相机是三维数据,激光雷达是二维数据,联合标定实现激光雷达和深度相机的关联。通过动态调整标定板的空间位置,采集多组不同视角的点云数据与图像信息,在数据采集完成后,采用 Autoware 标定工具包,对记录的数据包进行回放,并从中选取具有代表性的图像帧进行参数优化。
-
ORB-SLAM融合激光雷达建图:采用贝叶斯估计方法实现激光雷达与深度相机数据的融合,首先将激光雷达的二维地图与深度相机的三维点云进行空间对齐,对三维点云进行二维投影,建立统一的栅格地图表示;然后基于贝叶斯概率理论,通过后验概率统计实现传感器数据融合。
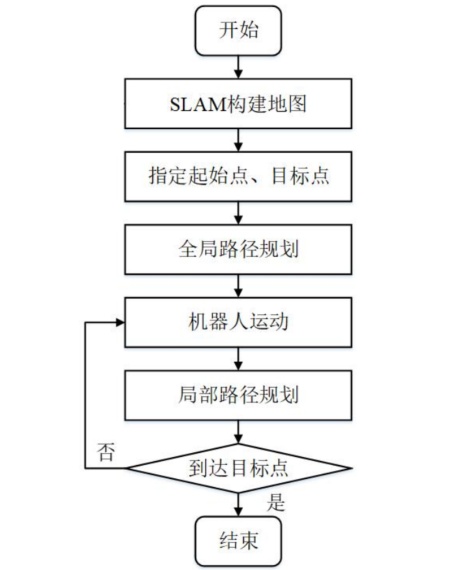
3. 改进路径规划
-
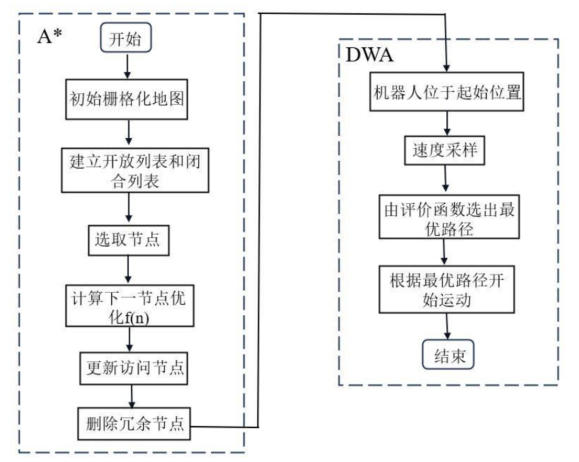
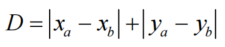
Astar启发函数距离优化:传统的 Astar算法选择欧氏距离作为启发函数表达式,路径容易发生转向,选择曼哈顿距离作为算法的启发函数
-
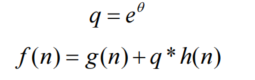
启发函数权重优化:基于实时传感器数据动态调整启发式函数,以提高路径规划的准确性和效率,角度表示起终点连线跟当前位置跟终点连线的夹角
-
删除冗余节点:
-
如果相邻三个节点连线在同一条直线上,则删除中间位置节点;
-
如果跳过一个节点后,下一个节点的连线夹角较小,则删除被跳过的节点
-
-
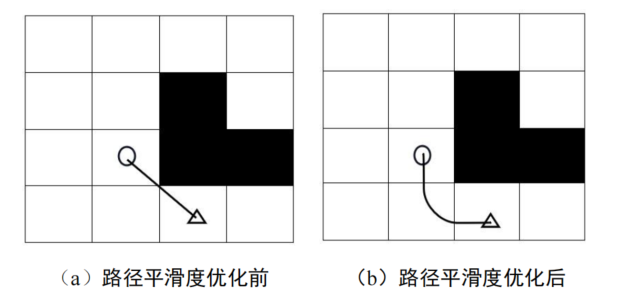
路径平滑度优化:使用三次 B 样条曲线法对路径进行平滑处理
-
融合局部路径规划DWA:机器人路径规划算法Astar用来规划全局路径,不能实时避开突发性障碍物,当出现未知的静止或移动障碍物时,动态窗口法(DWA)可以避开局部路径规划中的动态障碍物。