REF:建筑机器人自主导航关键技术研究进展及展望
1. 环境建图
环境地图分为先天和后天环境信息模型,其中先天环境信息模型可提前输入至建筑机器人系统,后天环境信息模型需要机器人运动过程中感知环境获取
-
先天环境信息模型:通过CAD和BIM的二维或三维建筑设计图纸获取,基于此建立环境信息模型。
-
后天环境信息模型:建模方法主要有运动恢复结构(structure from motion,SFM)、多视图立体视觉(multiple view stereo,MVS)和SLAM
2. 自主定位
机器人定位技术分为相对定位、绝对定位和组合定位
-
相对定位:在移动机器人位姿初始值给定前提下,基于内部传感器信息计算出每一时刻位姿相对于上一时刻位姿距离及方向角变化,进而实现位姿实时估计,此方法又称为航迹推测,主要有里程计(轮式里程计、视觉里程计和激光雷达里程计等)和惯性导航等方法
-
绝对定位:确定机器人在全局参考框架下的位姿信息,主要方法有导航信标、地图匹配、全球定位系统 ( GPS)、UWB 定位、无线网络(WIFI)定位 、 无线射频识别 (RFID)定位和激光跟踪测量定位等
-
组合定位:结合相对定位与绝对定位的方法
3. 路径规划
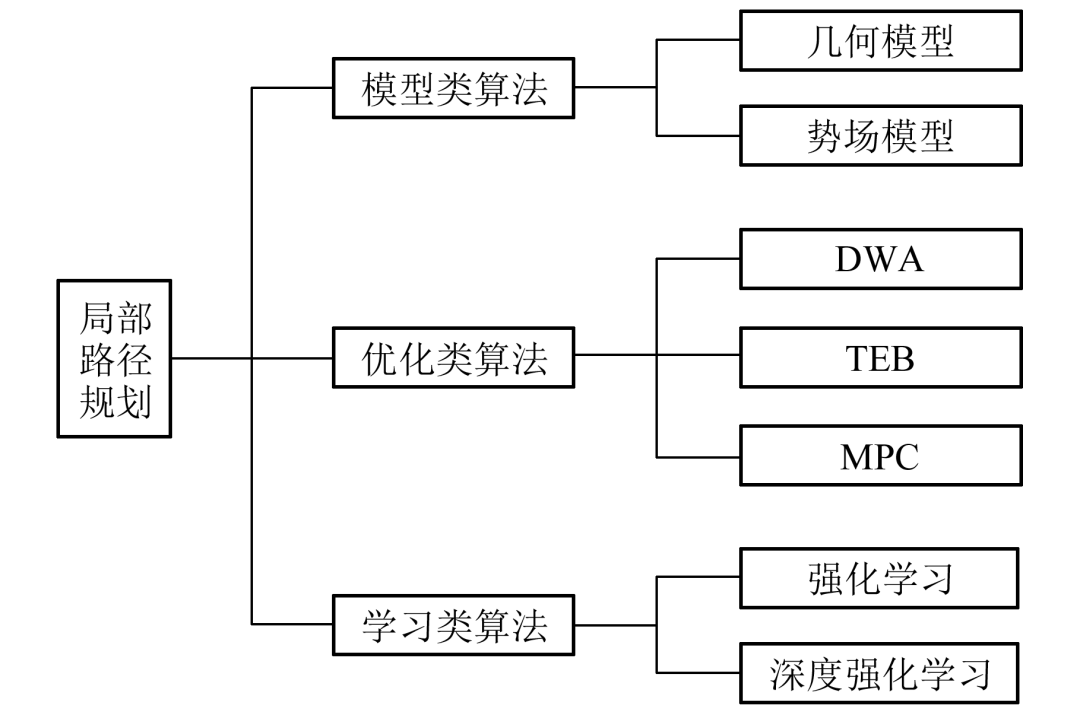
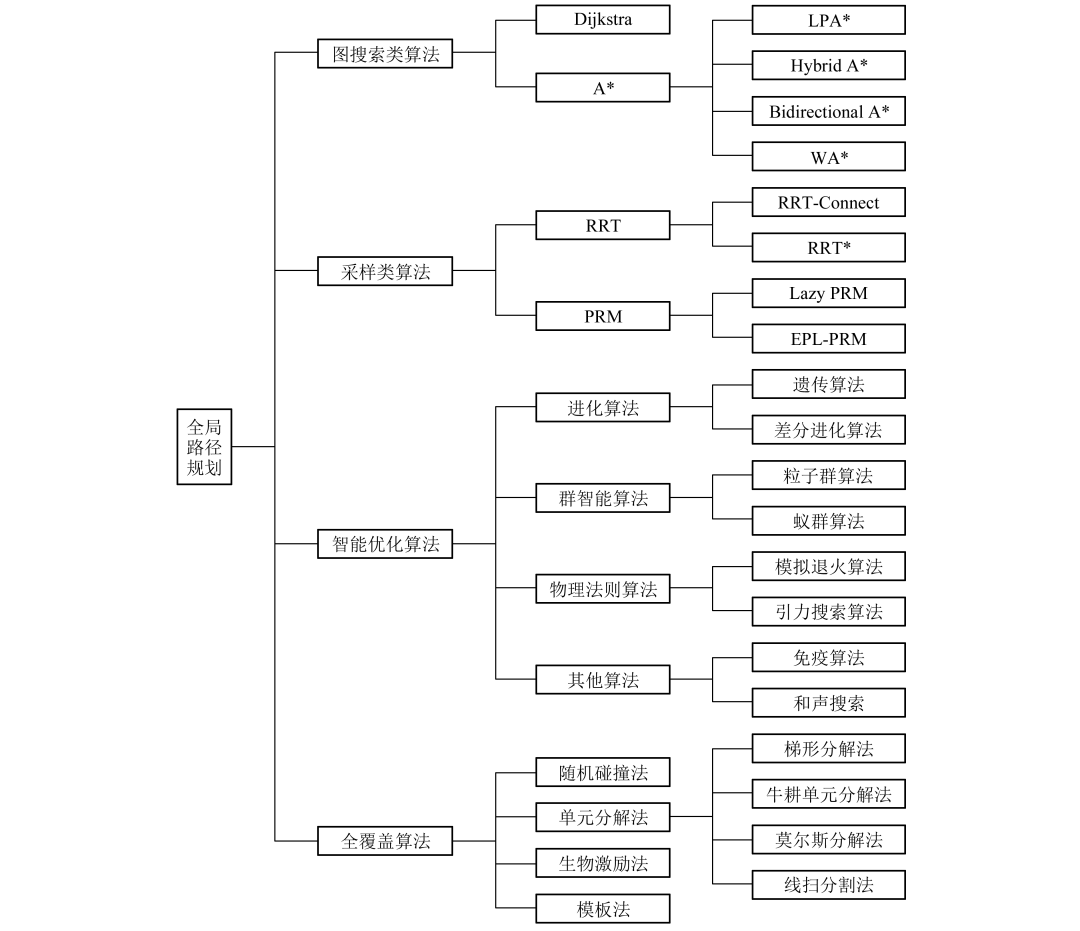
路径规划是机器人环境感知和运动控制之间的桥梁,路径规划可以描述为在机器人自身位姿已知的情况下,根据优化目标(例如轨迹长度最短、运动时间最少等)寻找到一条从当前位置到指定目标的最优路径。根据对工作环境理解程度不同,路径规划又分为全局路径规划和局部路径规划。
-
全局路径规划:当全局静态环境地图已知时,在静态环境条件下按照特定的算法搜寻一条无碰撞路径
-
局部路径规划:机器人只了解动态环境的部分信息或者对环境信息完全不了解,通过传感器感知信息不断地更新环境模型 ,考虑了机器人本身运动参数、路径方向与障碍物等信息