图像处理中的滤波可分为低通滤波(平滑、去噪)和高通滤波(增强细节、检测边缘)。索贝尔(Sobel)算子是图像处理中最常用的高通滤波算子之一,它通过卷积强调灰度变化较大的区域,从而提取图像的边缘特征。
基本原理
概念
高通滤波是一种允许高频信息通过、抑制低频信息的图像滤波操作。
- 低频:图像中变化缓慢的区域,例如大片的天空、平滑的墙面。
- 高频:图像中变化剧烈的部分,如边缘、纹理、噪声。
高通滤波通常用于:
- 边缘检测
- 纹理增强
- 图像锐化
- 特征提取
从空间域角度看,高通滤波就是利用带有正负值的卷积核对图像进行卷积,使灰度变化突出的区域被放大。
卷积核示例
常见高通滤波核包括:
锐化核:
0 -1 0
-1 5 -1
0 -1 0
拉普拉斯算子:
0 -1 0
-1 4 -1
0 -1 0它们都包含正负系数,使得:
- 区域灰度变化越大,其卷积结果越大;
- 平滑区域(低频)结果趋近 0 ,被抑制。
索贝尔算子也属于典型高通滤波,通过一阶微分检测梯度。
索贝尔(Sobel)算子原理
梯度与边缘的关系
图像的边缘对应像素灰度的急剧变化区域,而灰度变化可用**梯度(Gradient)**衡量。
二维图像梯度定义:
Gx = ∂I/∂x (水平变化)
Gy = ∂I/∂y (垂直变化)边缘强度:
G = sqrt(Gx^2 + Gy^2)索贝尔算子就是通过近似求一阶偏导数,从而检测边缘方向和强度。
数学卷积核
水平 Sobel(检测垂直边缘)
Gx =
[-1 0 +1
-2 0 +2
-1 0 +1]为什么能检测垂直边缘?
观察这两个区域:
左侧像素 * (-1 -2 -1)
右侧像素 * (+1 +2 +1)也就是说:
- 右侧像素亮、左侧像素暗 → 结果为正(正梯度✔)
- 左侧像素亮、右侧像素暗 → 结果为负(负梯度✔)
- 左右差别越大 → 响应越强 → 垂直边缘更明显
垂直 Sobel(检测水平边缘)
Gy =
[-1 -2 -1
0 0 0
+1 +2 +1]为什么能检测水平边缘?
- 上方像素与下方像素做加权差分
- 如果上暗下亮 → Gy 大(正)
- 如果上亮下暗 → Gy 大(负)
即:
上方像素 * (-1 -2 -1)
下方像素 * (+1 +2 +1)→ 上下差值越明显,水平边缘越强。
特点
- 核心思想是一阶微分 + 加权平滑
- 3x3 卷积能够平滑噪声,比简单的 Roberts、Prewitt 更稳定
- 对噪声不太敏感,检测边缘效果比 Roberts、Prewitt 更好
为什么 Sobel 算子仍属于高通滤波?
因为:
- 卷积核系数中有正负符号
- 使得边缘(高频)响应明显
- 对低频区域卷积结果趋近于零
换句话说,Sobel = 积分平滑 + 微分增强,是典型高通滤波器。
OpenCV 中 Sobel
OpenCV 使用 cv2.Sobel() 封装卷积操作,可自动计算 Gx 或 Gy。
基本原型:
cv2.Sobel(src, ddepth, dx, dy, ksize=3)参数说明:
- src:输入图像
- ddepth :输出图像深度,通常为
cv2.CV_64F防止溢出 - dx、dy :指定求 x 方向或 y 方向的梯度
- dx=1, dy=0 → Gx
- dx=0, dy=1 → Gy
- ksize:Sobel 核大小,默认为 3,可以取 1、3、5、7
示例
使用 OpenCV 实现高通滤波与 Sobel 边缘检测。
python
import cv2
import numpy as np
# 读取图像并转灰度
img = cv2.imread("test.jpg")
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 1. Sobel X(检测垂直边缘)
sobel_x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=3)
# 2. Sobel Y(检测水平边缘)
sobel_y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=3)
# 3. 计算梯度强度
sobel_mag = cv2.magnitude(sobel_x, sobel_y)
# 转换为可视化格式(0-255)
sobel_x = cv2.convertScaleAbs(sobel_x)
sobel_y = cv2.convertScaleAbs(sobel_y)
sobel_mag = cv2.convertScaleAbs(sobel_mag)
# 4. 高通滤波(锐化效果)
kernel_hp = np.array([
[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]
])
highpass = cv2.filter2D(gray, -1, kernel_hp)
# 显示结果
cv2.imshow("Gray", gray)
cv2.imshow("Sobel X", sobel_x)
cv2.imshow("Sobel Y", sobel_y)
cv2.imshow("Sobel Magnitude", sobel_mag)
cv2.imshow("High-pass Sharpen", highpass)
cv2.waitKey(0)
cv2.destroyAllWindows()执行效果:
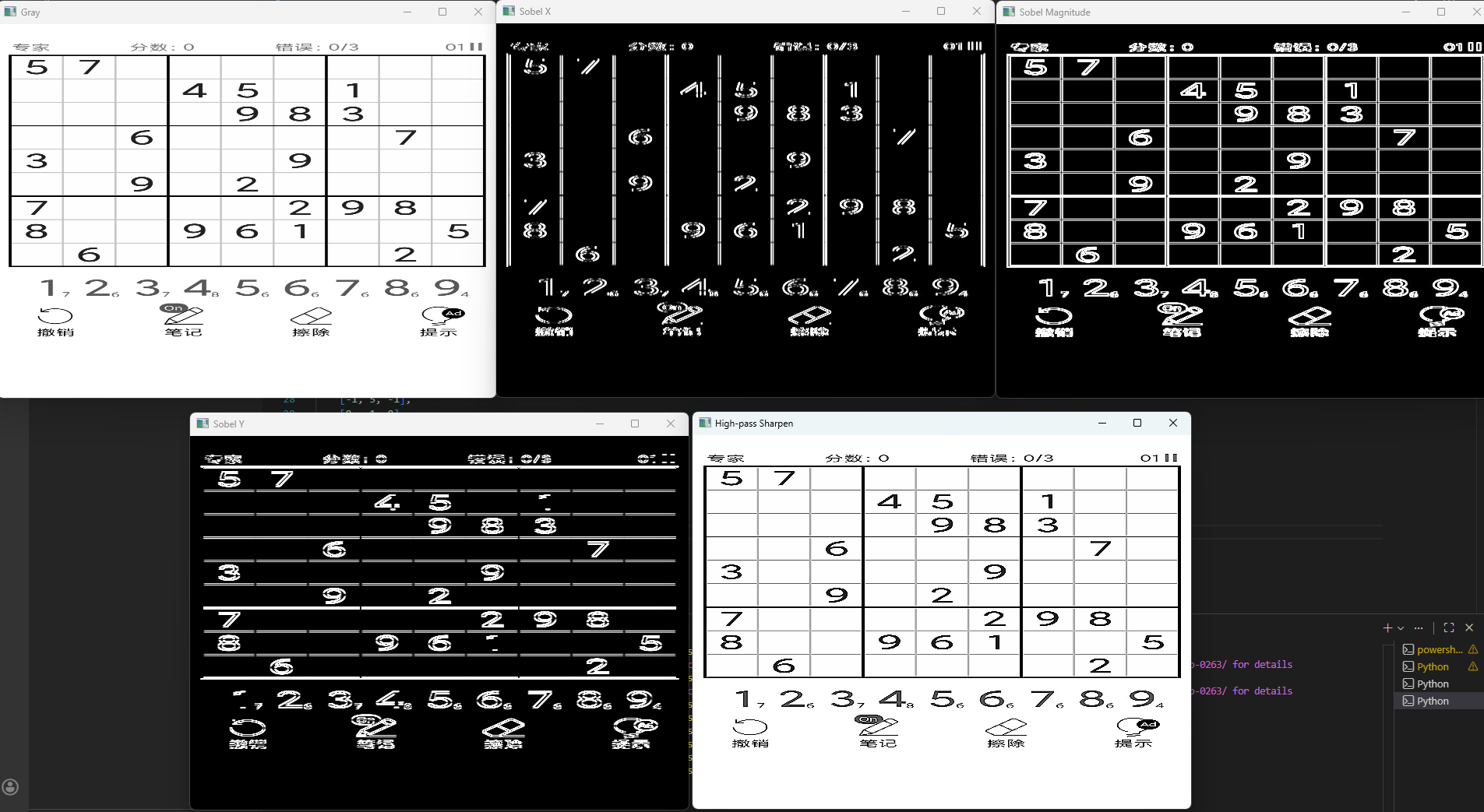
结果解释:
Sobel X:
- 强调左右方向灰度变化
- 垂直边缘清晰可见(如门框、建筑物立柱)
Sobel Y:
- 强调上下方向灰度变化
- 水平边缘突显(如桌面边缘)
梯度幅值(Magnitude):
- 综合 X、Y,形成最终边缘图
- 与 Canny 边缘检测相比更原始但控制简单
高通锐化结果:
- 图像整体更"清晰"
- 细节增强,但可能引入噪声
索贝尔算子与其他边缘算子的比较
| 算法 | 类型 | 优点 | 缺点 |
|---|---|---|---|
| Roberts | 一阶微分 | 简单、速度快 | 对噪声敏感、弱平滑 |
| Prewitt | 一阶微分 | 稍优于 Roberts | 平滑能力不足 |
| ★Sobel | 一阶微分 + 平滑 | 性价比最高、鲁棒性强 | 不如 Canny 稳定 |
| Laplacian | 二阶微分 | 方向无关、边缘明显 | 噪声更敏感 |
| Canny | 综合方法 | 效果最好、边缘最清晰 | 参数较多、计算量大 |
总结
- 高通滤波强调高频信息,适合边缘增强
- 索贝尔算子通过一阶微分 + 平滑实现鲁棒的边缘检测
- OpenCV 的
cv2.Sobel可方便计算 Gx、Gy 和梯度幅度