1 二分查找框架
cpp
int binarySearch(vector<int>& nums, int target) {
int left = 0, right = nums.size() - 1;
while (...) {
int mid = left + (right - left) / 2;
if (nums[mid] == target) {
...
} else if (nums[mid] < target) {
left = ...
} else if (nums[mid] > target) {
right = ...
}
}
}2 二分搜索框架
cpp
class Solution {
public:
// 标准的二分搜索框架,搜索目标元素的索引,若不存在则返回 -1
int search(vector<int>& nums, int target) {
int left = 0;
// 注意
int right = nums.size() - 1;
while(left <= right) {
int mid = left + (right - left) / 2;
if(nums[mid] == target) {
return mid;
} else if (nums[mid] < target) {
// 注意
left = mid + 1;
} else if (nums[mid] > target) {
// 注意
right = mid - 1;
}
}
return -1;
}
};要理解这个二分搜索算法的边界处理核心 ,关键在于抓住三个核心设计的一致性:**right 的初始化值、while 循环条件、left/right 的更新逻辑。**这三者必须配套,否则会出现死循环或漏查元素的问题。下面逐点拆解边界处理的细节:
一、核心前提:二分搜索的适用场景
该算法仅适用于 有序数组(无重复元素)------ 这是二分搜索的基础,只有数组有序,才能通过「中间元素与目标的大小比较」缩小搜索范围。
二、边界处理的三个关键细节(核心)
我们围绕「为什么这么设计」展开,对比错误设计的问题,突出正确逻辑的合理性。
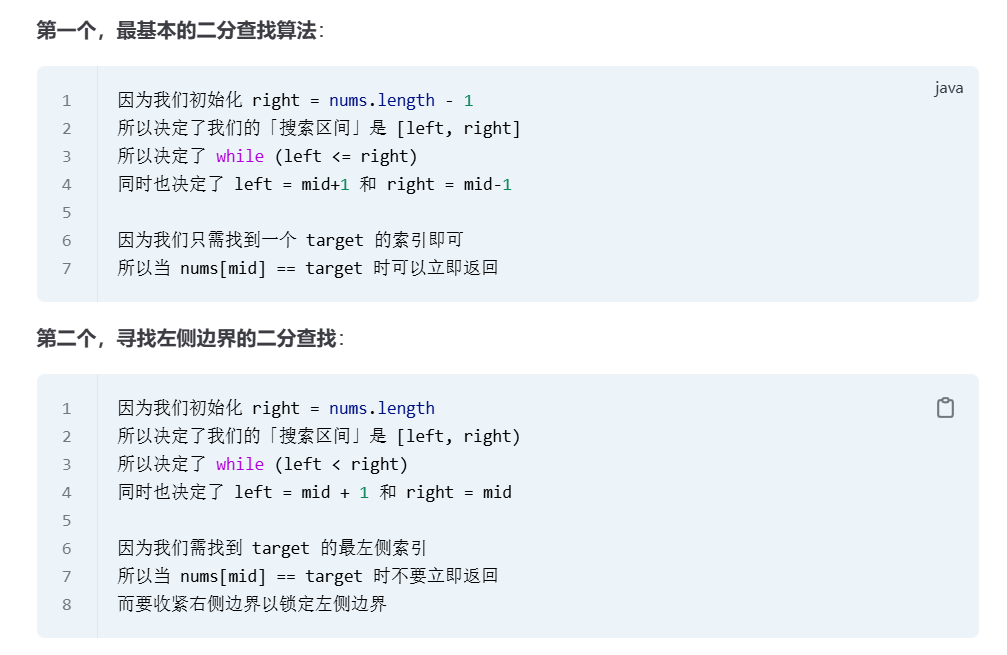
1. 右边界初始化:right = nums.size() - 1(闭区间定义)
- 设计含义 :搜索范围是
[left, right](左闭右闭区间),即left和right指向的元素都属于待搜索范围 。- 例:数组
[1,3,5,7],初始left=0,right=3,搜索范围是[0,3](包含所有元素)。
- 例:数组
- 为什么不初始化为
right = nums.size()?- 若
right = nums.size(),搜索范围变成[left, right)(左闭右开),后续循环条件和更新逻辑必须跟着调整(比如while(left < right))。该算法选择「闭区间」是为了逻辑更直观(左右边界都包含有效元素)。
- 若
- 错误后果 :若误写
right = nums.size(),且后续逻辑不变,当target > nums.back()时,right会一直大于left,导致循环无法终止(死循环)。
2. 循环条件:while(left <= right)(允许区间闭合)
- 设计含义 :当
left == right时,搜索范围是[left, left](单个元素),仍需检查该元素是否为目标 ------ 因为闭区间内的所有元素都要覆盖。- 例:数组
[5],target=5:left=0,right=0,循环执行mid=0,判断nums[0]==5,返回正确索引。
- 例:数组
- 为什么不写
while(left < right)?- 若用
left < right,当left == right时循环终止,会漏掉对最后一个元素的检查。 - 反例:数组
[5],target=5:left=0,right=0,循环不执行,直接返回-1(错误)。
- 若用
- 边界临界情况 :
- 数组为空(
nums.size()=0):right = -1,left=0 > right,循环不执行,返回-1(正确,空数组无目标)。 - 目标小于所有元素(
target < nums[0]):最终right会小于left,循环终止,返回-1(正确)。 - 目标大于所有元素(
target > nums.back()):最终left会大于right,循环终止,返回-1(正确)。
- 数组为空(
3. 左右边界更新:left = mid + 1 / right = mid - 1(排除已检查的 mid)
- 设计逻辑 :因为
mid位置的元素已经和target比较过(确定不是目标,或已返回),所以下一轮搜索范围必须排除mid,避免重复检查或死循环。- 当
nums[mid] < target:目标在mid右侧,且mid已排除,所以left = mid + 1(新范围[mid+1, right])。 - 当
nums[mid] > target:目标在mid左侧,且mid已排除,所以right = mid - 1(新范围[left, mid-1])。
- 当
- 为什么不能写
left = mid或right = mid?- 反例 1:数组
[1,3],target=3:- 初始
left=0,right=1,mid=0,nums[0]=1 < 3,若left=mid(仍为 0),则下一轮循环还是left=0,right=1,mid=0------ 无限死循环。
- 初始
- 反例 2:数组
[3,5],target=3:- 初始
left=0,right=1,mid=0,nums[0]=3 == target,返回 0(正确);若target=2,nums[0]=3>2,若right=mid(仍为 0),下一轮left=0,right=0,mid=0,nums[0]>2,right=mid=-1,循环终止(正确)?------ 看似偶然正确,但在其他场景会出错:- 数组
[1,2,3],target=4:mid=1(2<4)→left=1→ 再次mid=1→ 死循环。
- 数组
- 初始
- 反例 1:数组
- 核心原则 :更新逻辑必须让搜索范围严格缩小(每轮至少减少 1 个元素),否则会陷入死循环。
三、边界处理的一致性验证(关键总结)
该算法的边界设计本质是「闭区间 [left, right] 的全程一致性」:
- 初始化:
right = nums.size()-1→ 闭区间包含所有元素; - 循环:
left <= right→ 闭区间不为空(仍有元素待查); - 更新:
left=mid+1/right=mid-1→ 闭区间排除已查元素,范围严格缩小。
三者缺一不可,一旦破坏一致性(比如 right 初始为 nums.size(),但循环条件还是 left<=right),就会出现错误。
四、常见错误案例分析(加深理解)
错误 1:right = nums.size() + while(left <= right)
- 数组
[1,3,5],target=6:- 初始
left=0,right=3,mid=1(3<6)→left=2; mid=2(5<6)→left=3;mid=3(nums[3]越界!)→ 访问非法内存,程序崩溃。
- 初始
错误 2:while(left < right) + right = mid-1
- 数组
[5],target=5:- 初始
left=0,right=0→ 循环不执行,返回-1(漏查)。
- 初始
错误 3:left = mid + while(left <= right)
- 数组
[1,3],target=4:left=0,right=1→mid=0(1<4)→left=0(未更新)→ 死循环。
五、算法执行流程示例(直观感受边界变化)
以 nums = [1,3,5,7,9],target=7 为例:
- 初始:
left=0,right=4→ 范围[0,4]; mid=2(5<7)→left=3→ 范围[3,4];mid=3(7==7)→ 返回 3(正确)。
再以 target=4 为例:
- 初始:
left=0,right=4→mid=2(5>4)→right=1→ 范围[0,1]; mid=0(1<4)→left=1→ 范围[1,1];mid=1(3<4)→left=2→ 此时left=2 > right=1,循环终止,返回-1(正确)。
总结
该二分搜索的边界处理核心是「闭区间一致性」:
- 用
right = nums.size()-1定义闭区间; - 用
left <= right保证闭区间内所有元素都被检查; - 用
left=mid+1/right=mid-1排除已查元素,确保范围严格缩小。
这种设计的优势是逻辑直观、无冗余检查,且能覆盖所有边界情况(空数组、目标在数组外、目标在数组内),是二分搜索最经典、最不易出错的实现方式。
3 寻找左侧边界
cpp
int left_bound(vector<int>& nums, int target) {
int left = 0;
// 注意
int right = nums.size();
// 注意
while (left < right) {
int mid = left + (right - left) / 2;
if (nums[mid] == target) {
right = mid;
} else if (nums[mid] < target) {
left = mid + 1;
} else if (nums[mid] > target) {
// 注意
right = mid;
}
}
return left;
}这个算法是二分搜索的「左侧边界查找」变种。
(核心目标:找到第一个大于等于 target 的元素索引 ,或「target 第一次出现的位置」),其边界处理的核心是「**左闭右开区间 left, right)** 」的全程一致性 ------ 和你之前问的「标准二分搜索」(闭区间 \[left, right)是两种不同的设计范式,但逻辑自洽。
一、先明确:左侧边界查找的核心目标
和标准二分(找「是否存在 target」)不同,左侧边界查找要解决的是:
- 若数组有重复元素(如 1,2,2,3),返回 target 第一次出现的索引(如 target=2 返 1);
- 若数组无 target,返回 第一个大于 target 的元素索引(如 1,3,5 找 2,返 1;找 0 返 0;找 6 返 3);
- 本质是找到「最小的 index,使得 nums index ≥ target」。
这个目标决定了算法不能找到 target 就直接返回,而是要「继续向左收缩范围」,直到锁定最左侧的边界。
二、边界处理的三个关键细节(左闭右开 [left, right) 范式)
和标准二分的「闭区间」对比,左侧边界查找的所有设计都围绕「左闭右开」展开,三者必须严格一致:
1. 右边界初始化:right = nums.size()(而非 size-1)
- 设计含义 :搜索范围是
[left, right)(左闭右开)------left指向的元素属于待查范围,right指向的元素不属于 待查范围(是范围的「哨兵」)。- 例:数组 1,2,2,3,初始 left=0,right=4(数组长度 4),搜索范围是 [0,4),即索引 0、1、2、3(刚好覆盖所有元素)。
- 为什么不初始化为 right = nums.size ()-1?
- 若用 right = size-1,就变成了闭区间 left, right,后续循环条件和更新逻辑要跟着改(会和「收缩找左边界」的目标冲突)。
- 关键:左闭右开区间的
right本质是「待查范围的上限 + 1」,这样能自然处理「target 比所有元素大」的情况(最终返回 right = size,符合预期)。
2. 循环条件:while (left < right)(而非 left ≤ right)
- 设计含义 :左闭右开区间 [left, right) 中,
left == right时,区间是空的(没有元素可查),循环终止。- 例:待查范围 [2,2) → 无元素,直接退出。
- 为什么不能用 left ≤ right?
- 若用 left ≤ right,当 left == right 时,会进入循环,此时 mid = left = right,而 nums right 可能越界(因为 right 初始是 size,当 target 比所有元素大时,right 始终是 size,mid = size 会访问非法索引)。
- 核心:左闭右开区间的「有效范围」是 left < right,循环只需要处理有效范围。
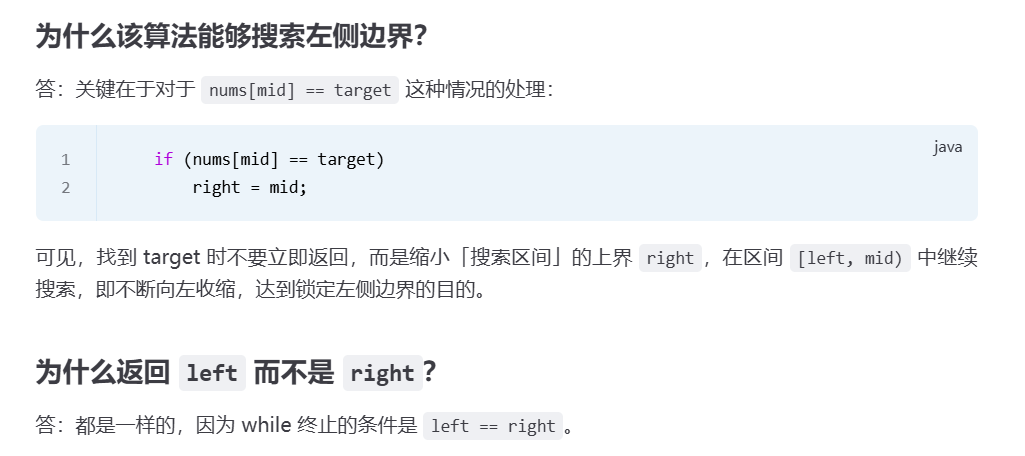
3. 核心逻辑:找到 target 后,不返回,而是收缩右边界 right = mid
这是左侧边界查找和标准二分的本质区别 ------ 目标是找「最左侧」的 target,所以即使找到 mid 位置是 target,也不能停,要继续向左找,看看有没有更早出现的 target。
我们分三种情况拆解更新逻辑:
| 条件 | 说明 | 边界更新方式 | 新搜索范围 | 核心目的 |
|---|---|---|---|---|
| numsmid == target | mid 可能是左边界,但也可能有更左的 target | right = mid | [left, mid) | 收缩右边界,向左找更左的 target |
| numsmid < target | target 在 mid 右侧(mid 及左侧都太小) | left = mid + 1 | [mid+1, right) | 排除 mid 及左侧,向右找 |
| numsmid > target | target 在 mid 左侧(mid 及右侧都太大) | right = mid | [left, mid) | 排除 mid 及右侧,向左找 |
- 关键疑问 1:为什么 nums mid == target 时,要设 right = mid 而非 right = mid-1?
- 因为区间是左闭右开 [left, mid),right = mid 意味着「下一轮只查 mid 左侧的元素」,但不会排除 mid 本身(因为新范围是 [left, mid),mid 不属于新范围,但 mid 是当前找到的 target 位置,后续会通过 left 逼近 mid)。
- 例:nums = 1,2,2,3,target=2,mid=2(nums 2=2)→ right=2,新范围 [0,2) → 查索引 0、1,继续找左边界。
- 关键疑问 2:为什么 nums mid > target 时,也是 right = mid 而非 right = mid-1?
- 左闭右开区间 left, right) 中,mid 属于当前范围(已检查),nums \[mid > target 说明 target 在左侧,所以新范围是 [left, mid)(排除 mid 及右侧),right 直接设为 mid 即可(因为 mid 不再属于新范围)。
- 对比标准二分:标准二分是闭区间,所以要 right = mid-1(排除 mid);这里是左闭右开,right = mid 就等价于排除 mid。
- 关键疑问 3:为什么 nums mid < target 时,还是 left = mid + 1?
- 因为 nums mid < target,mid 及左侧都不可能是 target,所以直接排除 mid,left 设为 mid+1(新范围从 mid+1 开始),保证范围严格缩小。
三、执行流程示例(直观感受边界收缩)
示例 1:有重复元素,找 target 左边界
nums = 1,2,2,3,4,target=2
- 初始:left=0,right=5(范围 [0,5))
- mid = 0 + (5-0)/2 = 2 → nums 2 = 2 == target → right=2(新范围 [0,2))
- mid = 0 + (2-0)/2 = 1 → nums 1 = 2 == target → right=1(新范围 [0,1))
- mid = 0 + (1-0)/2 = 0 → nums 0 = 1 < target → left=1(新范围 [1,1))
- left == right,循环终止 → 返回 left=1(正确,是 2 第一次出现的索引)
示例 2:无 target,找第一个大于 target 的元素
nums = 1,3,5,7,target=4
- 初始:left=0,right=4(范围 [0,4))
- mid=2 → nums 2=5 > 4 → right=2(新范围 [0,2))
- mid=1 → nums 1=3 < 4 → left=2(新范围 [2,2))
- 循环终止 → 返回 left=2(nums 2=5,是第一个大于 4 的元素,正确)
示例 3:target 比所有元素小
nums = 2,4,6,target=1
- 初始:left=0,right=3(范围 [0,3))
- mid=1 → nums 1=4 > 1 → right=1(范围 [0,1))
- mid=0 → nums 0=2 > 1 → right=0(范围 [0,0))
- 循环终止 → 返回 left=0(正确,第一个大于 1 的元素是 nums 0=2)
示例 4:target 比所有元素大
nums = 2,4,6,target=7
- 初始:left=0,right=3(范围 [0,3))
- mid=1 → nums 1=4 <7 → left=2(范围 [2,3))
- mid=2 → nums 2=6 <7 → left=3(范围 [3,3))
- 循环终止 → 返回 left=3(等于数组长度,说明 target 不存在,且所有元素都比 target 小)
四、返回值的特殊处理(重要)
算法最终返回 left(或 right,因为循环终止时 left == right),但需要根据实际需求判断是否存在 target:
- 若要判断「target 是否存在」:返回后需检查
left是否在数组范围内,且nums[left] == target。- 例:nums = 1,3,5,target=2 → 返回 left=1,但 nums 1=3≠2 → 说明 target 不存在。
- 若只需要「第一个大于等于 target 的索引」(如插入位置):直接返回 left 即可(无需判断)。
补充完整的「带存在性检查」的左侧边界查找:
cpp
int left_bound(vector<int>& nums, int target) {
int left = 0;
int right = nums.size();
while (left < right) {
int mid = left + (right - left) / 2;
if (nums[mid] == target) {
right = mid;
} else if (nums[mid] < target) {
left = mid + 1;
} else {
right = mid;
}
}
// 存在性检查:left 越界(target 比所有元素大)或 nums[left] != target → 不存在
if (left >= nums.size() || nums[left] != target) {
return -1; // 表示 target 不存在
}
return left; // 存在,返回左边界索引
}五、和标准二分的核心区别(对比记忆)
| 设计维度 | 标准二分(找目标索引) | 左侧边界查找(找左边界) |
|---|---|---|
| 核心目标 | 判断 target 是否存在,返回任意索引 | 找 target 第一次出现的索引(或插入位置) |
| 区间定义 | 闭区间 left, right | 左闭右开区间 [left, right) |
| right 初始化 | nums.size()-1 | nums.size() |
| 循环条件 | left ≤ right | left < right |
| 找到 target 后 | 直接返回 mid | 不返回,right = mid(收缩左边界) |
| nums mid > target 时 | right = mid-1 | right = mid |
| 循环终止后 | 未找到返回 -1 | 返回 left(需额外检查是否存在 target) |
总结
左侧边界查找的核心是「左闭右开区间 + 找到 target 后收缩右边界」:
- 区间定义 [left, right) 是所有边界设计的基础,确保 right 初始化、循环条件、更新逻辑一致;
- 关键动作是
nums[mid] == target时不返回,而是right = mid,持续向左收缩,锁定最左侧的 target; - 返回值 left 本质是「第一个大于等于 target 的索引」,需根据需求判断是否存在 target。
这种设计能高效处理**「重复元素找左边界」「找插入位置」** 等场景,时间复杂度仍是 O (log n),和标准二分一致。
4搜索区间:二分搜索的「范围核心」
搜索区间,本质是二分搜索中「当前仍需检查的元素范围」------ 它是用左右指针(left、right)定义的一个连续索引区间 ,所有可能满足目标条件(比如等于 target、是 target 左边界)的元素,都必须在这个区间内。
二分搜索的核心逻辑,就是不断缩小搜索区间 (每次排除一半不可能的元素),直到区间为空(没找到)或找到目标(直接返回)。而你之前接触的「标准二分」和「左侧边界二分」,本质区别就是「搜索区间的定义不同」------ 区间定义直接决定了 right 初始化、循环条件、指针更新这三大关键细节(必须三者一致,否则出错)。
一、搜索区间的两种核心定义(二分的两大范式)
二分搜索的搜索区间只有两种主流定义,所有边界处理都围绕这两种定义展开,我们用表格对比,结合你熟悉的代码理解:
| 定义类型 | 核心形式 | 适用场景 | 关键特征(左右指针含义) |
|---|---|---|---|
| 左闭右闭区间 | [left, right] |
标准二分 (找目标是否存在) | left 和 right 指向的元素「都属于待检查范围」 |
| 左闭右开区间 | [left, right) |
左侧 / 右侧边界查找 | left 指向的元素属于待查范围,right 是「范围哨兵」(不属于待查范围) |
1. 左闭右闭区间 [left, right](标准二分的搜索区间)
对应你第一次问的「标准二分搜索」,搜索区间的规则很直观:
- 区间内的所有索引
i(满足left ≤ i ≤ right),都是**「还没检查过、可能是目标」**的元素; - 比如数组
[1,3,5,7],初始搜索区间是[0,3](left=0,right=3),意味着要检查索引 0、1、2、3 对应的所有元素; - 缩小区间时,必须排除已经检查过的
mid(因为mid已经和target对比过):- 若
nums[mid] < target:mid及左侧都不可能是目标,区间缩小为[mid+1, right](left=mid+1); - 若
nums[mid] > target:mid及右侧都不可能是目标,区间缩小为[left, mid-1](right=mid-1);
- 若
- 区间为空的条件:
left > right(比如left=4,right=3),此时没有元素可查,循环终止。
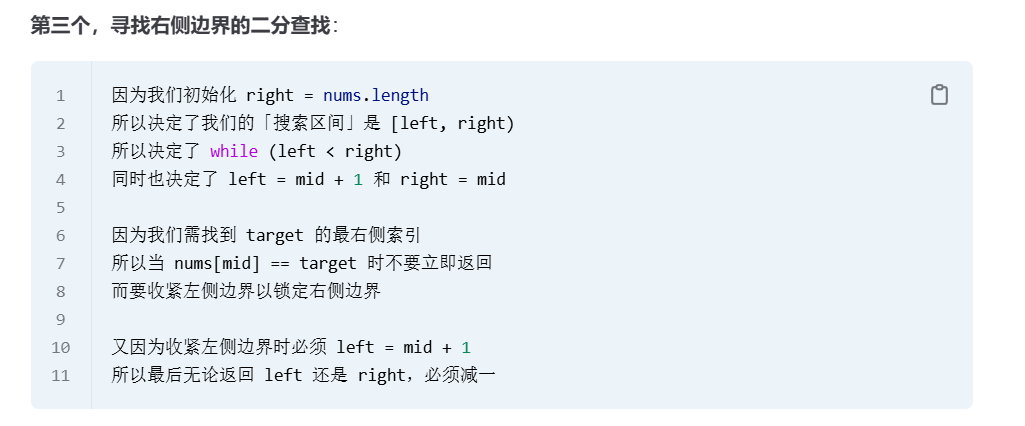
2. 左闭右开区间 [left, right)(左侧边界的搜索区间)
对应你第二次问的「左侧边界查找」,搜索区间的规则是**「左包含、右不包含」**:
- 区间内的所有索引
i(满足left ≤ i < right),才是待检查元素;right指向的索引「永远不检查」,只是用来标记范围的上限; - 比如数组
[1,2,2,3],初始搜索区间是[0,4](left=0,right=4),实际检查的是索引 0、1、2、3(刚好覆盖所有元素); - 缩小区间时,同样排除已检查的
mid,但因为「右不包含」,更新逻辑有差异:- 若
nums[mid] < target:mid及左侧无效,区间缩小为[mid+1, right](left=mid+1); - 若
nums[mid] > target:mid及右侧无效,区间缩小为[left, mid](right=mid,因为mid不再属于新区间,无需减 1); - 若
nums[mid] == target:不返回,继续向左找左边界,区间缩小为[left, mid](right=mid,排除mid右侧,保留左侧可能的更早的target);
- 若
- 区间为空的条件:
left == right(比如left=2,right=2),此时没有元素可查,循环终止。
二、为什么搜索区间是「二分的核心」?
所有二分的边界错误(死循环、漏查、越界),本质都是「搜索区间定义与代码逻辑不一致」。比如:
- 若你把左侧边界查找的
right初始化为nums.size()-1(按闭区间初始化),但循环条件还是left < right(左闭右开的循环条件),就会漏查最后一个元素; - 若你用闭区间
[left, right],但nums[mid] > target时更新right=mid(而非mid-1),就会陷入死循环(比如nums=[1,3],target=2,left=0、right=1会一直重复)。
简单说:先确定搜索区间的定义,再推导对应的 right 初始化、循环条件、指针更新逻辑,这是二分搜索不出错的关键。
三、搜索区间的直观理解(用例子感受)
以「左侧边界查找」nums=[1,2,2,3],target=2 为例:
- 初始搜索区间:
[0,4)→ 待查索引 0、1、2、3; - 第一次
mid=2(nums[2]=2):区间缩小为[0,2)→ 待查索引 0、1(排除 mid=2 及右侧,向左找更左的 2); - 第二次
mid=1(nums[1]=2):区间缩小为[0,1)→ 待查索引 0(继续排除 mid=1 及右侧); - 第三次
mid=0(nums[0]=1 < 2):区间缩小为[1,1)→ 区间为空,循环终止; - 最终返回
left=1(正确的左边界)。
整个过程中,搜索区间始终是「左闭右开」,每一步缩小都严格遵循「排除无效元素、保留可能目标」的原则,没有冗余检查,也不会越界。
总结
搜索区间是二分搜索的「规则前提」------ 它定义了「哪些元素还需要检查」,进而决定了代码的所有关键细节:
- 先明确是「左闭右闭
[left, right]」还是「左闭右开[left, right)」; - 按区间定义初始化
right(闭区间用size-1,开区间用size); - 按区间「为空的条件」写循环(闭区间
left ≤ right,开区间left < right); - 按「排除已检查的 mid」更新指针(闭区间需
mid±1,开区间右侧直接设mid)。
记住:搜索区间的一致性,是二分搜索正确的核心保障。
5 二分搜索总体思路模板:从「明确目标」到「代码落地」
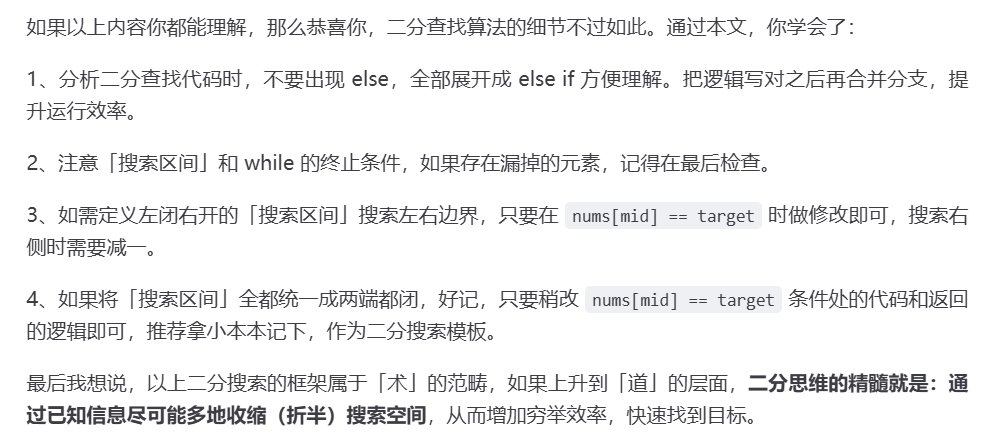
二分搜索的核心痛点是「边界混乱」,但只要遵循「先定目标→选区间范式→推三大细节→验证边界」的固定流程,就能解决 99% 的二分问题。
一、二分搜索适用场景(先判断能不能用)
首先明确:不是所有问题都能二分,必须满足 2 个前提:
- 有序性:数组 / 区间是「单调的」(升序 / 降序,大部分题目是升序);
- 可二分性:能通过「中间元素与目标的比较」,直接排除一半无效范围。
常见适用问题:
- 基础:找目标元素是否存在(标准二分);
- 边界:找目标的左边界(第一次出现)、右边界(最后一次出现);
- 扩展:找插入位置、找满足条件的最大值 / 最小值(如「最小的大于 target 的元素」)。
二、万能分析思路模板(4 步走,必不慌)
Step 1:明确「核心目标」(最关键,决定后续逻辑)
先问自己:我要找的是什么?用「一句话 + 数学表达式」定义清楚,避免模糊。
| 问题类型 | 核心目标(一句话) | 数学表达式(升序数组) |
|---|---|---|
| 标准查找 | 找到任意一个等于 target 的元素索引,无则返回 -1 | numsindex == target |
| 左边界查找 | 找到第一个 ≥ target 的元素索引 (或 target 第一次出现位置) | index 是最小的,满足 nums index ≥ target |
| 右边界查找 | 找到最后一个 ≤ target 的元素索引 (或 target 最后一次出现位置) | index 是最大的,满足 nums index ≤ target |
| 插入位置查找 | 找到 target 应该插入的索引 (不破坏有序性) | 等价于「左边界查找」(插入到第一个 ≥ target 的位置) |
👉 示例:题目「在排序数组中查找元素的第一个和最后一个位置」
→ 核心目标是「左边界 + 右边界」。
Step 2:选择「区间范式」(二选一,全程不变)
二分的边界问题,本质是「搜索区间的定义」。推荐优先选择 左闭右开 [left, right) 范式 ------ 因为左右边界查找逻辑对称,不易出错,且能自然处理「越界」情况。
两种范式对比(选好后全程不换):
| 范式 | 左闭右开 [left, right)(推荐) |
左闭右闭 [left, right](备选) |
|---|---|---|
| 区间含义 | left 属于待查范围,right 是哨兵(不属于) | left 和 right 都属于待查范围 |
| 初始值 | left=0,right=nums.size() | left=0,right=nums.size()-1 |
| 循环条件 | while (left < right)(区间非空) | while (left ≤ right)(区间非空) |
| 排除 mid 的方式 | 右边界更新:right=mid(无需减 1) | 右边界更新:right=mid-1 |
| 循环终止后 | left == right(返回 left 或 left-1) | left > right(返回 -1 或中间结果) |
👉 约定:后续所有案例都用「左闭右开 [left, right)」范式(记住:选好就不换!)。
Step 3:推导「三大核心细节」(基于目标和范式)
根据「核心目标」和「区间范式」,推导以下 3 个细节(直接套用逻辑,不用死记):
细节 1:mid 的计算(固定写法,避免溢出)
无论什么问题,mid 都用「向下取整」的安全写法(避免 int 溢出):
cpp
int mid = left + (right - left) / 2; // 等价于 (left+right)/2,但无溢出风险👉 注意:只有「左开右闭 (left, right]」范式的右边界查找需要向上取整(我们不用这个范式,所以不用记)。
细节 2:指针更新逻辑(核心!按目标分情况)
根据「mid 位置元素与 target 的关系」,决定如何缩小范围 ------ 核心原则是「排除无效元素,保留可能满足目标的范围」。
按「核心目标」分类,直接套用以下逻辑(升序数组):
| 问题类型 | nums mid < target 时 | nums mid == target 时 | nums mid > target 时 |
|---|---|---|---|
| 标准查找 | left = mid + 1(目标在右) | return mid(找到直接返回) | right = mid(目标在左) |
| 左边界查找 | left = mid + 1(mid 及左都太小) | right = mid(不返回,向左找更左的) | right = mid(mid 及右都太大) |
| 右边界查找 | left = mid + 1(mid 及左都太小,向右找) | left = mid + 1(不返回,向右找更右的) | right = mid(mid 及右都太大) |
👉关键记忆点:
- 左边界查找:找到 target 后「收缩右边界」(right=mid),向左逼近;
- 右边界查找:找到 target 后「扩大左边界」(left=mid+1),向右逼近;
- 标准查找:找到 target 直接返回(不用找边界)。
细节 3:循环终止后的返回值处理(避免漏查 / 误判)
循环终止时,left == right(左闭右开范式),但返回值需根据「核心目标」调整,且必须加「存在性检查」(避免 target 不存在时返回错误索引)。
各问题类型的返回值逻辑:
| 问题类型 | 初步返回值 | 存在性检查(避免错误) | 最终返回值 |
|---|---|---|---|
| 标准查找 | -1(循环内没返回就是不存在) | 无需额外检查(循环内找到已返回) | 循环内返回 mid,否则 -1 |
| 左边界查找 | left | 1. left 越界(left >= nums.size ())→ 不存在;2. nums left != target → 不存在 | 存在则返回 left,否则 -1 |
| 右边界查找 | left - 1(因为最后一次找到 target 时 left=mid+1) | 1. ans < 0(left=0 → ans=-1)→ 不存在;2. nums ans != target → 不存在 | 存在则返回 ans,否则 -1 |
| 插入位置查找 | left | 无需检查(即使 target 不存在,left 也是正确插入位置) | 直接返回 left |
👉 示例:左边界查找中,nums=1,3,5,target=2 → left=1,但 nums 1=3≠2 → 存在性检查失败,返回 -1(表示 target 不存在)。
Step 4:验证「边界测试用例」(确保无错)
写好代码后,必须用 3 类边界用例测试(覆盖所有极端情况):
- target 比所有元素小(如 nums=2,4,6,target=1);
- target 比所有元素大(如 nums=2,4,6,target=7);
- 数组为空(nums=\[\])或只有一个元素(nums=5);
- 数组有重复元素(如 nums=1,2,2,3,target=2)。
👉 测试原则:只要有一个用例出错,就回到 Step 3 检查「指针更新逻辑」或「返回值处理」。
三、实战案例:用模板解决 3 类经典问题
案例 1:标准查找(LeetCode 704. 二分查找)
问题:
给定升序无重复数组,查找 target,存在返回索引,否则返回 -1。
按模板分析:
- 核心目标:nums index == target;
- 区间范式:左闭右开
[left, right); - 三大细节:
- mid:
left + (right - left)/2; - 指针更新:
- numsmid < target → left=mid+1;
- numsmid == target → return mid;
- numsmid > target → right=mid;
- 返回值:循环内没返回则返回 -1(无需额外检查)。
- mid:
代码:
cpp
int search(vector<int>& nums, int target) {
int left = 0;
int right = nums.size(); // 左闭右开
while (left < right) {
int mid = left + (right - left) / 2;
if (nums[mid] == target) {
return mid; // 找到直接返回
} else if (nums[mid] < target) {
left = mid + 1;
} else {
right = mid;
}
}
return -1; // 循环结束没找到
}测试用例:
- nums=-1,0,3,5,9,12,target=9 → 返回 4(正确);
- nums=-1,0,3,5,9,12,target=2 → 返回 -1(正确);
- nums=5,target=5 → 返回 0(正确);
- nums=5,target=3 → 返回 -1(正确)。
案例 2:左边界查找(LeetCode 34. 查找元素的第一个和最后一个位置 - 左边界部分)
问题:
给定升序数组(可能有重复),找到 target 第一次出现的索引,无则返回 -1。
按模板分析:
- 核心目标:最小的 index,满足 nums index ≥ target;
- 区间范式:左闭右开
[left, right); - 三大细节:
- mid:
left + (right - left)/2; - 指针更新:
- numsmid < target → left=mid+1;
- nums mid == target → right=mid(收缩右边界,向左找);
- numsmid > target → right=mid;
- 返回值:
- 初步返回 left;
- 存在性检查:left >= nums.size () 或 nums left != target → 返回 -1;
- 否则返回 left。
- mid:
代码:
cpp
int left_bound(vector<int>& nums, int target) {
int left = 0;
int right = nums.size();
while (left < right) {
int mid = left + (right - left) / 2;
if (nums[mid] == target) {
right = mid; // 不返回,继续向左找
} else if (nums[mid] < target) {
left = mid + 1;
} else {
right = mid;
}
}
// 存在性检查
if (left >= nums.size() || nums[left] != target) {
return -1;
}
return left;
}测试用例:
- nums=1,2,2,3,target=2 → 返回 1(正确);
- nums=1,3,5,target=2 → left=1,nums 1=3≠2 → 返回 -1(正确);
- nums=2,4,6,target=1 → left=0,nums 0=2≠1 → 返回 -1(正确);
- nums=2,4,6,target=7 → left=3 ≥ 3 → 返回 -1(正确)。
案例 3:右边界查找(LeetCode 34. 查找元素的第一个和最后一个位置 - 右边界部分)
问题:
给定升序数组(可能有重复),找到 target 最后一次出现的索引,无则返回 -1。
按模板分析:
- 核心目标:最大的 index,满足 nums index ≤ target;
- 区间范式:左闭右开
[left, right); - 三大细节:
- mid:
left + (right - left)/2; - 指针更新:
- numsmid < target → left=mid+1;
- nums mid == target → left=mid+1(扩大左边界,向右找);
- numsmid > target → right=mid;
- 返回值:
- 初步返回 left-1(因为最后一次找到 target 时 left=mid+1,多走了一步);
- 存在性检查:ans <0 或 nums ans != target → 返回 -1;
- 否则返回 ans。
- mid:
代码:
cpp
int right_bound(vector<int>& nums, int target) {
int left = 0;
int right = nums.size();
while (left < right) {
int mid = left + (right - left) / 2;
if (nums[mid] == target) {
left = mid + 1; // 不返回,继续向右找
} else if (nums[mid] < target) {
left = mid + 1;
} else {
right = mid;
}
}
int ans = left - 1; // 修正多走的一步
// 存在性检查
if (ans < 0 || nums[ans] != target) {
return -1;
}
return ans;
}测试用例:
- nums=1,2,2,3,target=2 → ans=3-1=2 → 返回 2(正确);
- nums=1,3,5,target=2 → ans=1-1=0,nums 0=1≠2 → 返回 -1(正确);
- nums=2,4,6,target=1 → ans=0-1=-1 → 返回 -1(正确);
- nums=2,4,6,target=7 → ans=3-1=2,nums 2=6≠7 → 返回 -1(正确)。
四、常见错误避坑指南(必看!)
- 循环条件写错 :左闭右开范式用了
left <= right→ 导致越界(如 right=nums.size () 时,mid 可能等于 nums.size ()); - 指针更新漏 +1 :左闭右开范式中,nums mid < target 时写
left=mid→ 死循环(如 nums=1,3,target=3,left 永远停在 0); - 右边界查找忘记减 1:直接返回 left 而非 left-1 → 结果比正确值大 1;
- 存在性检查缺失:左边界查找直接返回 left,没检查 nums left 是否等于 target → target 不存在时返回错误索引;
- mid 计算溢出 :用
(left+right)/2而非left + (right-left)/2→ 当 left 和 right 接近 INT_MAX 时溢出。
五、总结:模板核心口诀
- 先定目标:一句话说清要找啥,用数学表达式量化;
- 再选范式:优先左闭右开
[left, right),初始 right 设 size; - 推导细节:mid 安全写,更新看目标(左边界收缩右,右边界扩大左);
- 验证边界:极端用例测三遍,存在性检查不能少。
按照这个模板,每次写二分前都按步骤走一遍,不用死记代码,而是理解逻辑,慢慢就会形成肌肉记忆,再也不会怕二分搜索了!
6 (补充)通俗理解 int 溢出:变量 "装不下" 数值了!
int 溢出,本质是:int 类型的变量有固定的数值存储范围,当你要存储的数值超过这个范围时,它会 "溢出"------ 就像水杯装满水后,多余的水会洒出来,变量里的数值也会变得错乱、不符合预期。
一、先搞懂:int 能装多大的数?(关键前提)
在 C++ 中,int 是「有符号整数类型」,它的存储范围由计算机的位数决定(绝大多数现代环境是 32 位 int):
- 32 位 int 的范围:
-2^31到2^31 - 1(即 -2147483648 到 2147483647); - 可以理解为:int 变量就像一个 "容量固定的盒子",最多能装 2147483647 这个正数,最小能装 -2147483648 这个负数。
如果你的计算结果超出这个范围(比如 2147483647 + 1,或 -2147483648 - 1),就会发生「溢出」。
二、溢出后会发生什么?(直观例子)
32 位 int 的溢出遵循「模运算规则」,但不用记复杂公式,看例子就懂:
1. 正数溢出(超过 2147483647)
比如计算 2147483647 + 1:
- 预期结果:2147483648;
- 实际结果:-2147483648(直接跳到 int 能存储的最小负数);
- 再比如
2147483647 + 2→ 实际结果:-2147483647。
就像钟表:时针转到 12 点后,再转 1 格就回到 1 点 ------int 的正数范围 "转到头",就会跳到负数范围。
2. 负数溢出(小于 -2147483648)
比如计算 -2147483648 - 1:
- 预期结果:-2147483649;
- 实际结果:2147483647(直接跳到 int 能存储的最大正数);
同样像钟表:时针转到 1 点后,再往回转 1 格就到 12 点 ------ 负数范围 "转到头",就会跳到正数范围。
3. 二分搜索中最容易出现的溢出场景
就是你之前接触的「mid 计算」:
cpp
// 错误写法:可能溢出
int mid = (left + right) / 2;比如:当 left = 2147483647,right = 2147483647(极端情况,比如找比所有元素大的目标):
left + right = 2147483647 + 2147483647 = 4294967294;- 这个结果远超 int 的最大范围 2147483647,发生溢出;
- 溢出后
left + right会变成-2(按 32 位 int 规则); - 最终
mid = -2 / 2 = -1,而数组索引没有负数,访问nums[mid]会直接程序崩溃!
三、为什么 left + (right - left) / 2 能避免溢出?
我们拆解这个公式,就能发现它和 (left + right) / 2 是「数学等价」的,但计算过程不会溢出:
1. 数学推导(简单版)
left + (right - left) / 2 = (2left + right - left) / 2 = (left + right) / 2两个公式的结果完全一样,但计算顺序不同:
- 错误写法
(left + right)/2:先算加法(可能溢出),再算除法; - 正确写法
left + (right-left)/2:先算减法(right - left,结果一定小于 right,不会溢出),再算除法,最后加 left(也不会溢出)。
2. 用溢出场景验证
还是 left = 2147483647,right = 2147483647:
- 先算
right - left = 2147483647 - 2147483647 = 0; - 再算
0 / 2 = 0; - 最后算
left + 0 = 2147483647; - 最终
mid = 2147483647(虽然数组索引可能越界,但这是后续逻辑要处理的,至少不会因为 mid 计算崩溃)。
四、总结
- int 溢出:int 变量的数值超过其存储范围(-2147483648 ~ 2147483647),导致数值错乱;
- 二分搜索中,
(left + right)/2会因 left 和 right 过大而溢出,导致程序崩溃; - 解决方案:用
left + (right - left)/2替代,本质是「改变计算顺序,避免先算大数加法」,既保证结果正确,又不会溢出; - 延伸:如果需要处理更大的数(比如超过 2147483647),可以用
long long类型(范围更大),但二分搜索中用left + (right - left)/2已经足够安全,是行业标准写法。