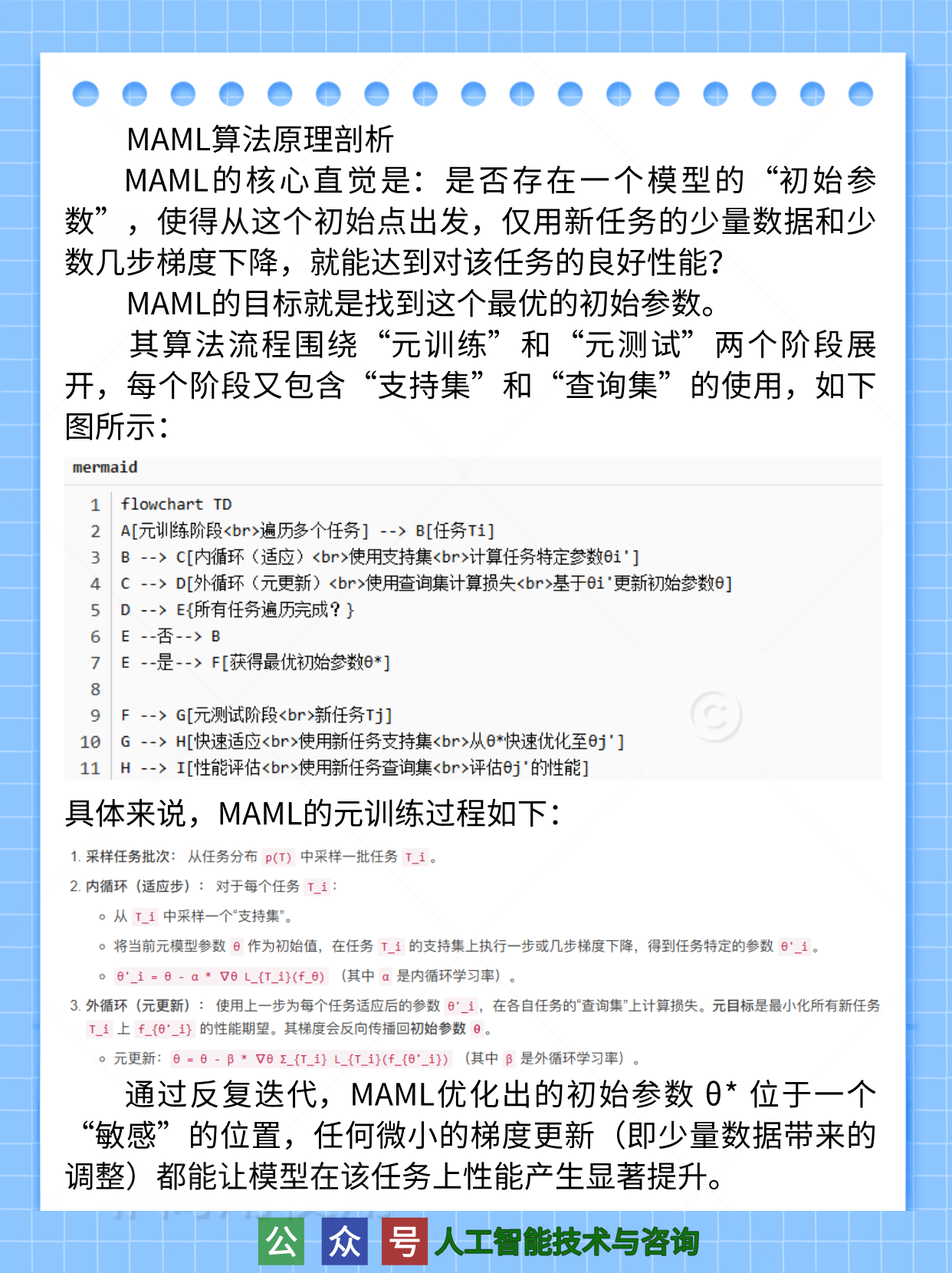
具身智能-多任务与元学习 一、模型无关元学习(MAML)------学习一个"易调参"的模型初始点1.1核心思想:优化"适应性"本身1.2MAML算法原理剖析1.3在机器人控制中的应用二、上下文元学习------从少量演示中快速吸收新技能2.1 核心思想:将任务信息编码为上下文2.2 以循环元学习为例第三章:多任务学习的架构设计------共享与专属的平衡艺术3.1 硬参数共享3.2 软参数共享
人工智能/具身智能/VLA/大模型/AI/LLM/Transformer 架构/AI技术前沿/Agent大模型/工信部证书/人工智能证书/职业证书