《 Dual-stage collaborative path planning and task allocation for UAV swarms in complex maritime rescue environments》
在2025年发表在 Reliability Engineering and System Safety上
一、研究背景与意义
海上救援是分秒必争的挑战。传统救援方式(如救援船、直升机)往往受制于响应速度、恶劣海况和成本限制。无人机集群以其快速部署、广域覆盖和协同作业的优势,被视为改变游戏规则的新力量。它们可以快速搜寻遇险船只、投掷救生设备、提供通信中继等。
然而,将无人机集群投入实际海上救援,面临几个核心难题:
环境极端复杂: 存在不可预测的动态风场、海浪以及岛屿、礁石等静态障碍物,对实时路径规划提出极高要求。
任务耦合紧密: "去哪飞"(路径规划) 和 "谁去做"(任务分配) 是两个深度耦合的问题。最优的路径取决于任务分配结果,而任务分配的成本又依赖于飞行路径。传统方法往往将两者分开处理,导致整体方案不是最优。
可靠性要求极高 : 救援任务中,系统容错能力至关重要。一旦集群中某架或多架无人机因故障、恶劣天气或碰撞而失效,系统必须能动态重新规划,确保任务不会因此失败。
这项研究的目的就是打通路径规划与任务分配之间的关系,创造一个能够自主协同、动态适应、容忍故障的无人机集群智能决策系统。其成功对于提升海上搜救的效率、成功率和安全性具有重大的理论价值与现实意义。
二、论文总体框架为双阶段协作优化
论文的核心创新在于将传统上分离的路径规划和任务分配问题建模为一个动态耦合的联合优化问题,并提出了一个新颖的双阶段梦想协作优化框架。
阶段一:路径规划
性质:连续空间中的轨迹优化问题。
目标:在复杂的三维海陆风场环境中,为每架无人机计算出从起点到目标点的最优可行路径。
算法:采用改进的梦想优化算法。
阶段二:任务分配
性质:离散组合优化问题。
目标:将多个任务(侦察、打击、评估)分配给异构的无人机集群,并在考虑任务执行失败概率 的情况下,实现自适应容错。
算法:采用离散版本的梦想优化算法。
协作机制:
-
路径规划模块将其输出的最短路径成本矩阵 作为任务分配模块的输入。
-
任务分配模块基于路径成本、任务序列约束和实时风险进行评估与分配。
-
当系统中出现无人机任务失败时,会触发在线重规划机制,同时调整任务分配和局部路径,确保任务的连续性。
三、论文方法具体实现
路径规划阶段基于IDOA
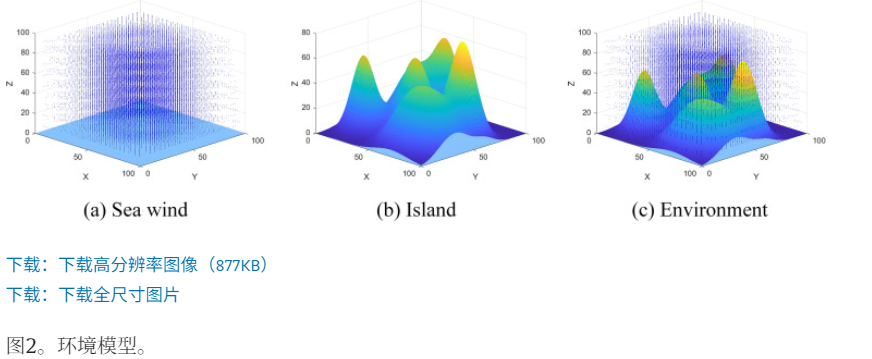
环境建模
为了进行真实的路径规划,研究构建了一个包含风场和岛屿地形的三维环境模型。
海上风场模型
采用流体动力学中的LambOseen涡旋模型来模拟海风对无人机飞行的扰动。该模型能精确描述风场的空间分布和演化。
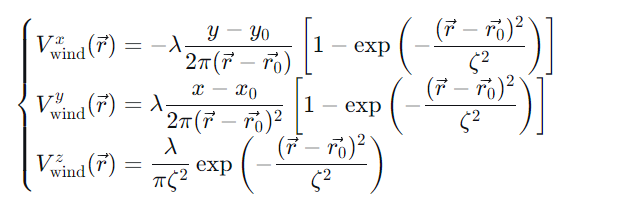
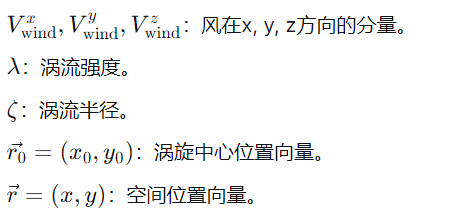
变量说明为:
作用:通过精确建模风场,使规划的路径能够主动利用或规避风场影响,提升飞行的稳定性和效率,而非被动抵抗。
岛屿地形模型
使用混合高斯函数来模拟不规则、多峰值的岛屿地形。
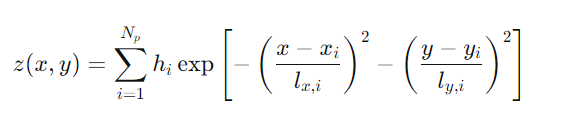
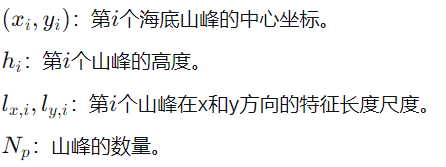
变量说明:
作用:生成一个连续、平滑且逼真的三维地形表面,用于碰撞检测,确保无人机路径不会与岛屿相撞。
路径优化模型与成本函数
路径规划的目标是找到一条安全、短捷、平滑且符合无人机动力学约束的路径。总成本函数定义为:

路径长度成本

作用:最小化总飞行距离,直接降低能耗和时间成本。
路径平滑度成本
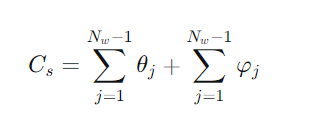
作用:惩罚过大的转向角和俯仰角变化,确保路径符合无人机的机动性限制,保证飞行的可行性与稳定性。论文中设\(\theta_{\max} = \varphi_{\max} = 45^\circ\)。
风场成本
计算路径上第k个航点的风速大小:

将风速投影到路径的切向和法向,评估其影响:

切向分量影响飞行速度。
法向分量引起横向漂移。
使用Sigmoid函数将成本归一化到合理区间:
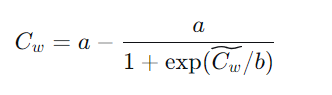
作用:量化风对路径的负面影响(阻力、漂移)和正面影响(顺风加速),引导算法选择受风影响更小的路径。
地形威胁成本
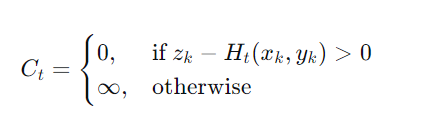
作用:这是一个硬约束。如果无人机在某个航点的海拔低于该点地形高度,则路径成本为无穷大,直接淘汰该路径,确保绝对的安全避障。
改进的梦想优化算法
原始的DOA模拟了人类梦境中的记忆重建、遗忘和知识共享过程。论文从四个方面对其进行了改进:
基于LHS的种群初始化
方法:拉丁超立方采样将每个维度划分为等概率区间,并在每个区间内随机采样,确保初始种群在搜索空间内均匀分布。
作用:克服简单随机初始化导致的种群聚集问题,提升全局探索能力,为找到全局最优解打下更好基础。
基于差分进化的探索阶段增强
在探索阶段(迭代前期),对每个个体随机选择的k_q个"遗忘维度"进行更新时,引入了DE的变异和交叉操作。
变异:从种群中随机选择三个不同个体,生成变异向量:
交叉:将变异向量与当前个体进行交叉,生成试验向量:
最终位置更新:

作用:DE操作引入了有方向的、基于种群差异的扰动,相比纯粹的随机扰动,能更有效地探索未知区域,显著增强全局搜索能力,避免早熟收敛。
扰动控制的局部搜索增强
在开发阶段(迭代后期),为了进行精细搜索,对"遗忘维度"的更新施加了一个随时间衰减的扰动。

作用:余弦项使得扰动幅度随着迭代进行而逐渐减小。在早期允许较大范围的探索,在后期则进行小范围精细搜索,提高了算法的收敛精度。
自适应边界处理
高维问题:当某个维度的值超出边界时,不再随机重置,而是从当前种群中选择一个可行个体,继承其对应维度的值。
低维问题:保留传统的随机重置策略。
作用:高维问题中,变量间通常存在关联。随机重置会破坏这种关联,导致解质量下降。继承策略能保持解的结构完整性,提升搜索稳定性和效率。
任务分配阶段:基于DIDOA
自适应容错协同多任务分配问题模型
这是一个扩展的CMTAP模型,明确考虑了任务执行失败的概率和动态调整机制。
任务执行失败概率:
作用:将不确定性和风险直接纳入模型,使任务分配方案天生具备风险意识。
任务分配成本函数
任务分配的总成本由总任务完成时间和无人机协同安全成本构成。
总完成时间:所有目标点完成其最终任务(评估)的时刻。
协同安全成本:惩罚无人机之间距离小于最小安全距离的情况。
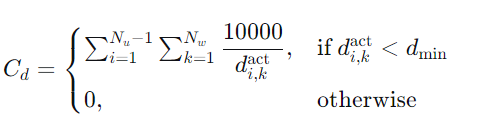
作用:在任务分配层面间接促进路径的协同碰撞避免。
离散梦想优化算法
DIDOA的核心是将连续优化算法离散化,以处理任务分配这一组合优化问题。
染色体编码
每个基因是一个四元组:目标编号 任务类型 无人机编号 无人机能力。
作用:这种编码方式直接表示了"哪个无人机在哪个目标执行什么任务"的完整任务计划,同时包含了执行顺序信息。
初始化与可行性修正
初始随机生成的分配方案很可能违反多种约束。DIDOA集成了四种修正算法:
-
无人机类型与能力约束修正:确保无人机只被分配给它有能力执行的任务。
-
无人机集群协作约束修正:确保需要多架无人机合作的任务,在数量、角色和时间上得到满足。
-
任务顺序与时间窗口约束修正:确保任务按照"侦察→打击→评估"的顺序执行,且在允许的时间窗内。
-
失败情况修正:在模拟中,如果检测到无人机故障,立即将其任务重新分配给其他可行的无人机。
作用:这些修正是保证算法在可行解空间内进行搜索的关键,避免了评估不可行解的计算浪费。
遗传操作增强
交叉:采用单点交叉。从父代中选择优良个体,交换部分基因序列生成子代。交叉过程需确保子代仍满足无人机能力约束。
变异:以一定概率随机改变染色体中某个基因的无人机编号,或调整任务的执行顺序。
作用:引入种群多样性,帮助算法跳出局部最优,是提升全局搜索能力的核心操作。
双阶段协作与容错机制
该框架的强大之处在于其动态响应和容错能力。
-
正常流程:IDOA为所有可能的无人机目标对生成最优路径 > 形成路径成本矩阵 > DIDOA基于此矩阵和AFTCMTAP模型进行任务分配。
-
故障响应:
当系统检测到某架无人机任务失败(根据概率模型)时,立即触发在线重规划。
任务分配调整:排除故障无人机,利用DIDOA中的失败情况修正算法,将中断的任务动态重新分配给其他可用且具备相应能力的无人机。
路径局部调整:为新分配的任务快速规划出从当前无人机位置到新目标点的路径。
- 作用:这种机制确保了在部分单元失效的情况下,整个任务系统仍能保持连续性和完整性,极大地提升了无人机集群在不确定、高风险环境下的系统级可靠性和鲁棒性。
四、实验效果
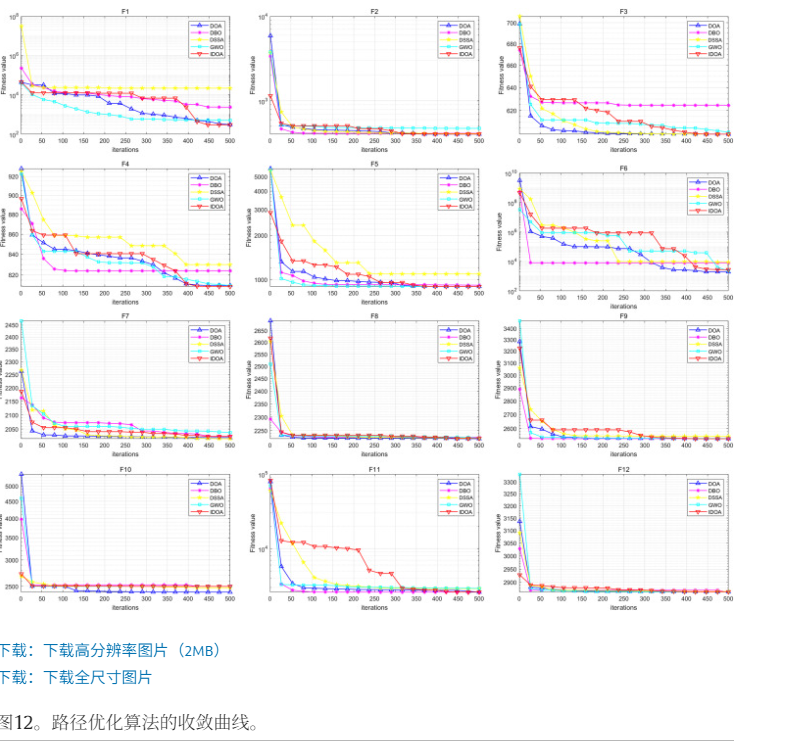
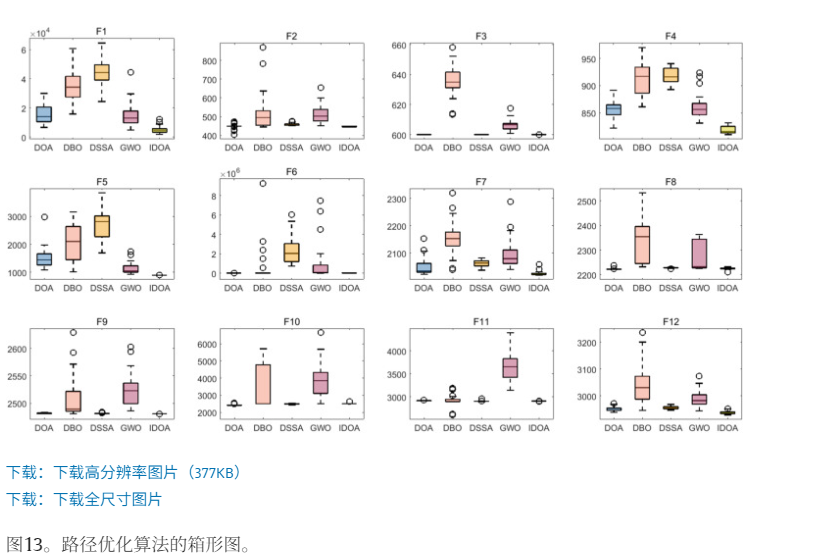
论文中分别采用收敛曲线和箱线,对DOA、DBO、DSSA、GWO、IDOA算法在CEC 2022基准测试套件(F1--F12)上的表现进行了比较分析。详细的比较结果中;收敛曲线清楚表明,IDOA不仅在大多数函数收敛速度更快,还能实现更好的最终适应度值。具体来说,IDOA在单模函数F1上收敛稳定,达到与DOA相当的终端适应度。在基本函数(F2--F5)中,它表现出持续快速收敛,并达到最佳或接近最佳终端适应度,尤其是在F4和F5上表现突出,有效逃离局部最优。在混合函数(F6--F8)上,IDOA显著加快收敛,达到比竞争算法更低的适应度值。对于复合函数(F9--F12),它在早期迭代中趋近最优解,最终获得最低的最终值。箱形图进一步验证了IDOA在所有测试函数上的高度稳定性和鲁棒性,体现在其平均值和方差方面的优异表现。这一优势在基础和混合函数场景中尤为明显,IDOA始终表现出极小的结果波动和最优性能,展示了通过所提增强实现的全局搜索能力和收敛精度的显著提升。
五、总结
这篇论文通过提出IDOA+DIDOA的双阶段协作框架,成功地解决了复杂海上救援环境中异构无人机群的联合路径规划与任务分配问题。其方法的详细性、创新性和实用性体现在:
环境建模逼真:使用LambOseen风场模型和混合高斯地形模型,为优化提供了可靠的物理基础。
算法改进深入:通过LHS、DE、扰动控制、自适应边界处理等一系列策略,显著提升了基础优化算法的性能。
模型考虑周全:AFTCMTAP模型首次将任务失败概率和在线动态调整机制深度融合到任务分配中。
系统集成巧妙:双阶段设计既尊重了路径规划(连续)与任务分配(离散)的本质差异,又通过成本矩阵和在线重规划实现了二者的紧密协同。