我是穿拖鞋的汉子,魔都中坚持长期主义的汽车电子工程师。
老规矩,分享一段喜欢的文字,避免自己成为高知识低文化的工程师:
做到欲望极简,了解自己的真实欲望,不受外在潮流的影响,不盲从,不跟风。把自己的精力全部用在自己。一是去掉多余,凡事找规律,基础是诚信;二是系统思考、大胆设计、小心求证;三是"一张纸制度",也就是无论多么复杂的工作内容,要在一张纸上描述清楚;四是要坚决反对虎头蛇尾,反对繁文缛节,反对老好人主义。
一直很喜欢发小老李QQ签名那句话---生活如逆水行舟,不进则退。农村做题家出来的汉子,我可能已经不具备享受快乐的权力,只有做个躬行的卒子,一步一个脚印往前走。
中年男人尽量避免陷入历史虚无主义,自己无需问"人活着为了什么?",做自己该做之事,七八月只管播种,到了十一二月收获季节,自有收获。

一、汽车电子电气架构(EEA)的演进历程
随着汽车产业向电动化、智能化、网联化、共享化("新四化")转型的加速,汽车已不再是单纯的机械交通工具,逐渐演变为集移动空间、智能终端、能源载体于一体的复杂系统。在这一变革中,汽车电子电气架构(Electrical/Electronic Architecture,简称EEA)作为整车的"神经网络"与"大脑中枢",其演进水平直接决定了车辆的智能化程度、功能迭代速度、研发效率及用户体验。从早期的分布式模块化架构,到如今主流的域集中架构,再到未来的整车中央计算与车云融合架构,EEA的每一次迭代都深刻推动着汽车产业的技术变革与商业模式创新。本文将系统梳理EEA的演进脉络,重点解析博世提出的六阶段演进理论,并深入剖析国内外主流车企及Tier1供应商的架构实践,探讨EEA演进的核心驱动力与未来发展趋势。
1、汽车电子电气架构演进的时代背景
在传统燃油车时代,汽车的核心竞争力集中于动力总成、底盘调校等机械性能,电子系统仅作为辅助功能存在,如发动机电子控制、车身电子防盗等。此时的EEA采用分布式模块化架构,每个功能对应一个独立的电子控制单元(ECU),ECU之间通过CAN总线进行简单的信息交互。随着汽车"新四化"的推进,这一传统架构逐渐暴露出诸多局限性:
-> 一是ECU数量激增,传统车型ECU数量通常在50-100个,而智能电动车已突破150个,导致整车线束复杂度上升、重量增加、成本居高不下;
-> 二是算力分散,难以满足自动驾驶、智能座舱等场景对海量数据处理和实时决策的需求;
-> 三是软硬件耦合紧密,功能迭代依赖硬件升级,无法实现快速的OTA(空中下载技术)更新;
-> 四是系统集成难度大,不同供应商的ECU接口不统一,导致研发周期长、协同效率低。
在此背景下,EEA的集中化演进成为必然趋势,其核心驱动力主要来自三个方面:技术创新、市场需求与商业模式变革。从技术层面看,芯片算力的指数级提升(如NVIDIA Orin芯片算力可达254TOPS)、高速以太网(如1000Mbps以太网)的普及、软件定义汽车(SDV)理念的兴起,为EEA的集中化提供了底层支撑;从市场需求看,消费者对自动驾驶(L2+及以上)、智能座舱(多屏交互、语音助手)、OTA升级等功能的需求日益强烈,倒逼车企重构EEA以实现功能快速落地;从商业模式看,传统汽车"一次性销售"模式逐渐向"产品+服务"模式转型,通过EEA的柔性化设计,车企可通过OTA推送付费订阅功能(如高级辅助驾驶服务),实现持续的收入增长。
2、博世六阶段演进理论---EEA发展的清晰蓝图
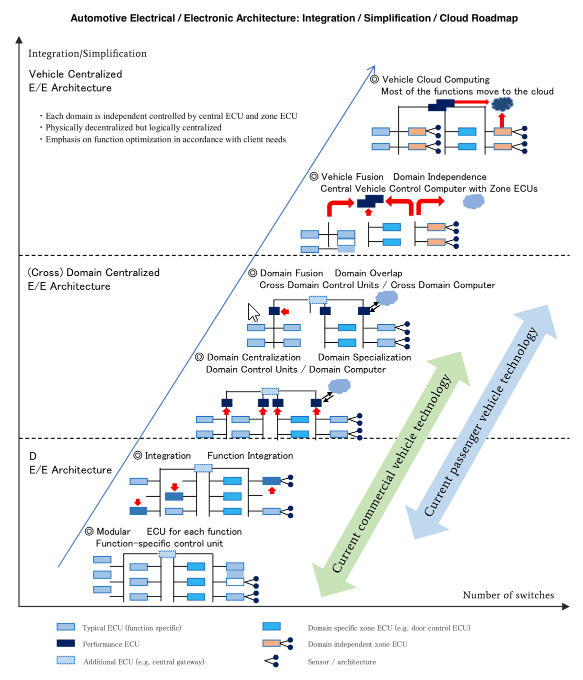
作为全球领先的汽车零部件供应商,博世对汽车电子电气架构的演进趋势有着深刻的洞察,其提出的"EEA发展六阶段"理论已成为行业内广泛认可的演进框架。该理论以"算力集中化、功能集成化、架构柔性化"为核心逻辑,清晰勾勒出从传统分布式架构到未来车云融合架构的完整路径,如下图2-1所示(注:原文提及的图2-1在此处省略,实际应用中可补充对应架构示意图)。
-> 第一阶段:模块化(Modular)架构
模块化架构是EEA的初始阶段,主要应用于2010年之前的传统燃油车。在这一阶段,汽车电子系统以"功能模块化"为设计理念,每个功能对应一个独立的ECU,如发动机控制器(ECM)、变速箱控制器(TCM)、车身控制器(BCM)等。ECU之间通过CAN总线(传输速率通常为500kbps)或LIN总线(传输速率通常为19.2kbps)进行通信,总线网络呈分散式布局。
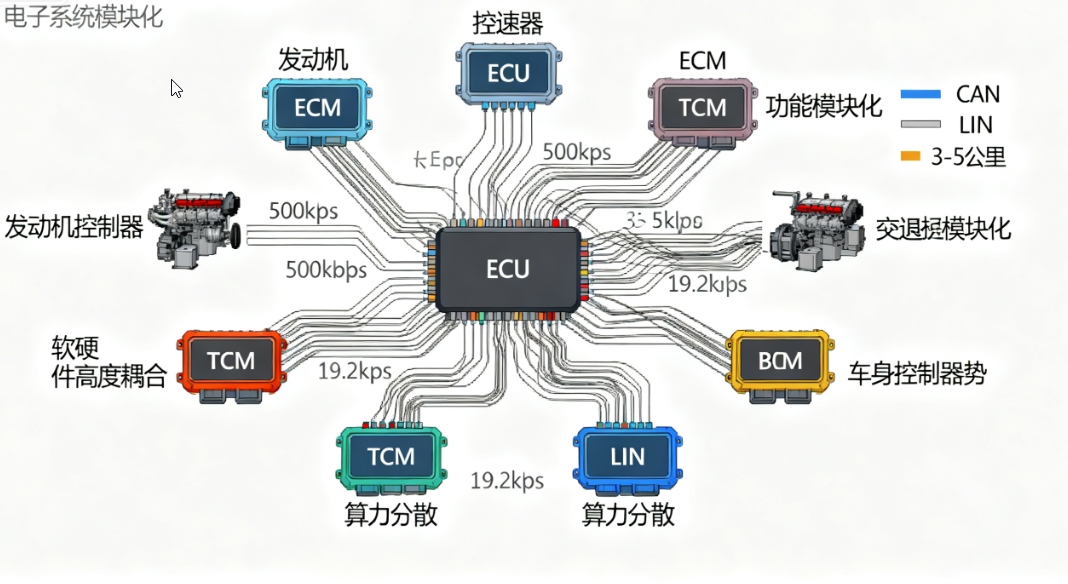
该架构的优势在于技术成熟、开发难度低、零部件通用性强,适合批量生产。但局限性也十分明显:一是ECU数量多,导致整车电子系统重量增加、成本上升,同时线束复杂度极高,传统车型线束长度可达3-5公里;二是算力分散,每个ECU的算力仅能满足单一功能需求,无法实现多功能协同;三是软硬件高度耦合,功能升级需更换ECU硬件,灵活性极差。例如,早期的大众高尔夫车型采用的就是典型的模块化架构,仅车身电子系统就包含近20个独立ECU。
-> 第二阶段:集成化(Integration)架构
随着汽车电子功能的增多,模块化架构的弊端日益凸显,EEA进入集成化阶段(2010-2015年)。这一阶段的核心思路是"功能集成",即将多个关联性较强的功能整合到一个ECU中,减少ECU数量,简化总线网络。例如,将传统的发动机控制器和变速箱控制器集成为人机动力总成控制器(PCM),将车身控制器和灯光控制器集成为车身中央控制器(BCCM)。
集成化架构在一定程度上缓解了ECU数量激增的问题,同时提升了功能协同效率。例如,动力总成控制器可实现发动机与变速箱的无缝配合,优化换挡逻辑,提升车辆动力性能和燃油经济性。但该阶段的集成仍停留在"功能级集成",未从根本上改变分布式架构的本质,总线网络仍以CAN总线为主,算力分散的问题依然存在,无法满足复杂功能的需求。
-> 第三阶段:域集中(Domain Centralization)架构
2015年后,随着自动驾驶和智能座舱技术的萌芽,EEA进入域集中阶段,这也是当前行业的主流架构。域集中架构的核心是"按功能域划分控制器",即将整车电子系统划分为若干个功能域,每个功能域由一个域控制器(Domain Controller)统一管理,域内ECU作为从节点,域间通过高速总线(如以太网)进行通信。
常见的功能域划分包括:动力域(负责发动机、变速箱、电池管理等)、底盘域(负责制动、转向、悬挂等)、车身域(负责灯光、门锁、车窗等)、座舱域(负责中控屏、仪表盘、语音交互等)、自动驾驶域(负责传感器数据处理、决策规划等)。域控制器作为域内的"大脑",集成了强大的算力和存储能力,可实现域内多ECU的协同控制和数据融合。
域集中架构的优势在于:一是大幅减少ECU数量,整车ECU数量可从100个以上减少至50个左右;二是提升域内功能协同效率,例如自动驾驶域控制器可同时处理摄像头、雷达、激光雷达等多传感器数据,实现精准的环境感知;三是简化总线网络,域内采用CAN/LIN总线,域间采用以太网,降低线束复杂度。例如,宝马G05 X5车型采用的就是域集中架构,将整车划分为动力域、底盘域、车身域、座舱域和自动驾驶域五大域,每个域配备独立的域控制器。
-> 第四阶段:域融合(Domain Fusion)架构
随着智能驾驶和智能座舱功能的深度融合(如AR-HUD导航与自动驾驶的结合),域集中架构的"域间壁垒"逐渐成为瓶颈,EEA进入域融合阶段(当前正处于过渡阶段)。域融合架构的核心是"跨域功能集成",即将关联性强的多个域控制器进行融合,形成"超级域控制器",进一步提升算力集中度和功能协同性。
典型的域融合方向包括"自动驾驶域与座舱域融合""动力域与底盘域融合"等。例如,将自动驾驶域控制器和座舱域控制器融合为"智能座舱与自动驾驶超级域控制器",可实现自动驾驶信息与座舱交互的无缝衔接,如在自动驾驶模式下,中控屏可实时显示车辆周围环境感知结果,AR-HUD可叠加导航路径和交通标识信息。
域融合架构的优势在于打破了域间数据交互的壁垒,提升了跨域功能的响应速度和协同精度。同时,超级域控制器的集成进一步减少了控制器数量,简化了整车电子系统的拓扑结构。例如,小鹏P7车型就采用了"自动驾驶域与座舱域融合"的架构,通过 Xavier 芯片实现了智能驾驶和智能座舱的协同控制。
-> 第五阶段:整车中央计算平台(Vehicle Computer)架构
域融合架构之后,EEA将进入整车中央计算平台阶段,这是集中化演进的高级形态。该阶段的核心是"整车级算力集中",即取消传统的功能域划分,由一个或多个中央计算平台统一管理整车所有电子功能,包括动力控制、底盘控制、自动驾驶、智能座舱等。中央计算平台配备超高算力的芯片(如NVIDIA Atlan芯片算力可达1000TOPS以上)和大容量存储单元,通过高速以太网(如10Gbps以太网)连接整车的传感器、执行器和区域控制器。
在整车中央计算平台架构中,区域控制器(Zone Controller)作为"分布式执行节点",负责连接本区域内的传感器和执行器,将采集到的数据上传至中央计算平台,并执行中央计算平台下发的控制指令。区域控制器的引入进一步简化了线束布局,通过"中央计算平台+区域控制器"的架构,整车线束长度可大幅缩短(如特斯拉Model Y线束长度已缩短至1公里左右)。
该架构的优势在于:一是实现了整车算力的最大化利用,中央计算平台可根据不同功能的需求动态分配算力资源;二是彻底打破了功能域的壁垒,实现了全场景的功能协同;三是软硬件解耦程度极高,功能迭代完全通过OTA实现,无需更换硬件。目前,特斯拉Model 3/Y采用的架构已接近整车中央计算平台阶段,其中央计算模块(CCM)整合了智能驾驶、智能座舱和车身控制等核心功能。
-> 第六阶段:车-云计算(Vehicle Cloud Computing)架构
EEA演进的终极阶段是车-云计算架构,该阶段的核心是"车云一体化协同",即车辆的部分计算任务(如海量数据训练、高精度地图更新、复杂场景决策等)迁移至云端,通过车联网(V2X)实现车辆与云端的实时数据交互,形成"车端边缘计算+云端协同计算"的混合计算模式。
在车-云计算架构中,车端中央计算平台负责实时性要求高的计算任务(如车辆控制、实时环境感知),云端平台负责非实时性但计算复杂度高的任务(如自动驾驶模型训练、车队数据统计分析)。同时,云端平台可实现车辆的远程监控、诊断和升级,为用户提供个性化的服务(如基于驾驶习惯的车辆设置推荐)。
该架构的优势在于:一是充分利用云端的海量算力和存储资源,突破车端硬件算力的限制;二是实现车辆的持续进化,通过云端模型迭代,不断提升自动驾驶和智能座舱的功能体验;三是构建车联网生态,实现车辆与智能交通系统(ITS)、智慧城市的深度融合。目前,宝马、奔驰等车企已开始布局车-云计算架构,通过与阿里云、亚马逊AWS等云服务提供商合作,探索车云一体化的应用场景。
二、全球主流企业EEA实践案例深度剖析
在EEA演进的浪潮中,国内外主流车企和Tier1供应商纷纷加快架构创新步伐,推出了各具特色的EEA方案。这些方案不仅体现了企业对行业趋势的判断,也为行业提供了宝贵的实践经验。以下将重点解析安波福、特斯拉、大众、沃尔沃、奥迪、德国曼恩商用车等企业的EEA实践。
1、安波福:智能电气架构(SVC)的冗余与高效
安波福作为全球领先的汽车零部件供应商,在EEA领域提出了"智能电气架构(Smart Vehicle Architecture,简称SVC)"方案,该方案以"中央集中、区域分布式"为核心,强调系统的冗余性和高效性,为自动驾驶时代的安全需求提供了有力支撑。
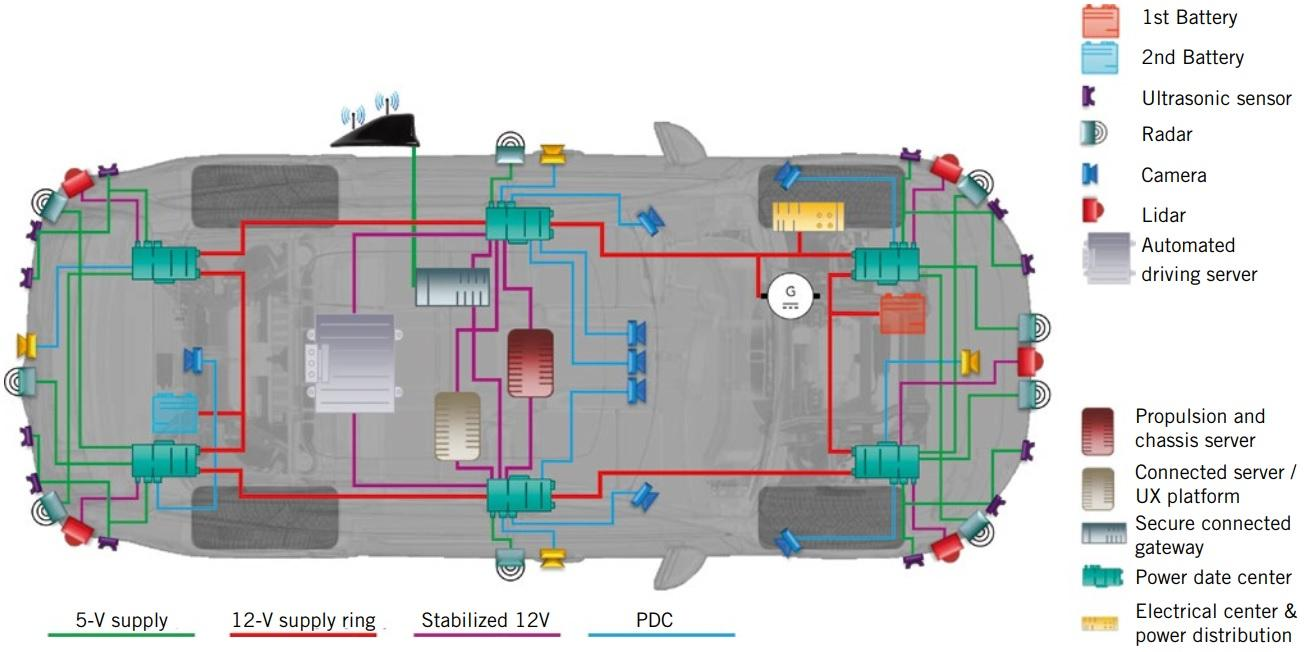
SVC架构的核心组成包括:中央计算机、动力数据中心(PDC)、区域控制器和开放式服务器平台。中央计算机是整车的"大脑",集成了高性能计算芯片和安全网关,负责处理整车的核心控制算法和数据融合任务;动力数据中心(PDC)作为"能源与数据分配中心",可为周围的电子系统分配电源,同时收集并分发大量原始传感器数据到中央计算机,实现能源和数据的高效管理;区域控制器作为"分布式接口节点",为区域内的传感器和执行器提供标准化接口,管理区域内的电源分配,并提供局部算力支持,减少中央计算机的负担;开放式服务器平台作为中央计算平台的扩展,采用虚拟化技术,可动态分配算力资源,确保汽车在关键部位发生故障时仍能安全行驶,从而实现系统的安全冗余。
在网络拓扑方面,SVC架构采用"双环以太网拓扑结构",实现了网络的冗余设计。双环拓扑意味着数据可通过两条独立的路径传输,当其中一条路径发生故障时,另一条路径可立即接管,确保网络通信的连续性和可靠性。这种冗余设计对于自动驾驶至关重要,可有效避免因网络故障导致的车辆失控风险。
SVC架构还强调"标准化接口"和"模块化设计",通过统一的接口规范,降低了不同供应商零部件的集成难度,缩短了研发周期;模块化设计则使得整车电子系统的维护和升级更加便捷,提升了架构的可扩展性。目前,安波福的SVC架构已应用于多款新能源车型,如通用汽车的Ultium平台车型,为车辆的智能化和安全性提供了坚实保障。
2、 特斯拉:从分布式到准中央计算的革命性突破
特斯拉作为新能源汽车和智能驾驶的领军企业,其EEA的演进历程堪称行业的"教科书级案例"。从Model S/X到Model 3/Y,特斯拉通过持续的架构创新,实现了从分布式向准中央计算架构的跨越式发展,充分体现了"软件定义汽车"的核心理念,推动了行业对EEA集中化的认知。
Model S/X时期的分布式架构:特斯拉早期的Model S和Model X车型采用的是较为传统的分布式架构,整车ECU数量超过100个,线束长度达到3公里。虽然在当时该架构已具备一定的先进性(如引入了17英寸中控屏和OTA功能),但随着智能驾驶功能的升级,分布式架构的局限性逐渐凸显,如算力分散导致自动驾驶功能响应速度慢、ECU数量过多导致线束复杂度高、软硬件耦合紧密导致功能迭代周期长等。
Model 3/Y时期的准中央计算架构:为解决分布式架构的弊端,特斯拉在Model 3/Y车型上进行了EEA的彻底重构,推出了"中央计算模块(CCM)+区域控制器"的准中央计算架构,该架构彻底抛弃了传统的功能域概念,实现了算力集中化、拓扑结构简化和软硬件解耦。
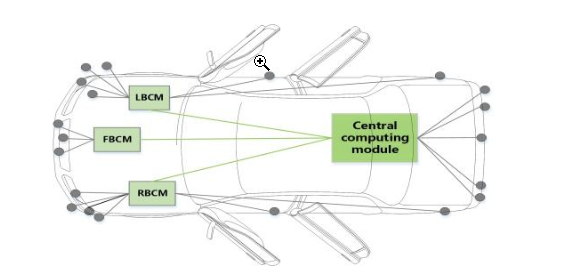
Model 3/Y的EEA核心组成包括:中央计算模块(CCM)、前车身控制模块(FBCM)、左车身控制模块(LBCM)和右车身控制模块(RBCM)。中央计算模块(CCM)是整车的核心,采用"Autopilot+IVI+T-BOX"三合一计算平台,将自动驾驶控制板、信息娱乐控制板和远程信息处理器集成到同一壳体中,配备NVIDIA Xavier芯片(算力可达30TOPS),负责处理自动驾驶、智能座舱、远程通信等核心功能;前车身控制模块(FBCM)又称智能配电模块,负责12V电池管理、电源分配和热管理功能;左车身控制模块(LBCM)和右车身控制模块(RBCM)分别负责左右区域的车身与便利系统、底盘与安全系统和部分动力系统功能。
该架构的革命性突破体现在三个方面:一是算力集中化,中央计算模块整合了多个核心功能的算力需求,实现了算力资源的高效利用;二是拓扑结构简化,通过区域控制器的引入,整车线束长度从Model S/X的3公里缩短至Model 3的1.5公里,Model Y进一步缩短至1公里左右,大幅降低了车身重量和成本;三是软硬件解耦,通过自研的操作系统(Tesla OS)和软件平台,实现了功能的快速迭代,特斯拉可通过OTA为车辆推送新功能(如自动泊车升级、语音助手优化等),用户无需更换硬件即可享受持续的功能提升。
特斯拉的EEA创新不仅提升了自身产品的竞争力,也深刻影响了整个行业的发展方向,推动了主流车企加速向集中化架构转型。例如,大众、宝马等传统车企在后续的电动化平台中,均借鉴了特斯拉的"中央计算+区域控制"思路。
3、大众:MEB平台与VW.OS的域融合实践
大众作为全球最大的汽车集团之一,面对电动化和智能化的浪潮,推出了专门的电动化平台------MEB(Modular Electric Drive Matrix)平台,该平台的核心之一是其域融合电子电气架构,旨在实现从分布式向集中化的转型,同时通过自研操作系统VW.OS实现软件定义汽车的目标。
MEB平台的EEA采用"域融合"架构,将整车划分为三大域控制器:整车控制器(ICAS1)、智能驾驶域控制器(ICAS2)和智能座舱域控制器(ICAS3),三大域控制器通过高速以太网连接,实现数据的高效交互。
整车控制器(ICAS1)是MEB架构的"中枢神经",集成了整车所有控制类功能,包括高压能量管理(负责电池包的充放电控制、温度管理)、低压电源管理(负责12V系统的电源分配)、扭矩控制(负责电机的动力输出调节)、车身电子控制(负责灯光、门锁等车身功能)、网关(负责域间数据路由)和存储等功能。此外,ICAS1还连接诊断接口和T-BOX(远程信息处理器),实现信息安全设计,并作为OTA主控ECU实现整车并行刷写,大幅缩短OTA升级时间。
智能驾驶域控制器(ICAS2)是MEB架构的"自动驾驶大脑",配备高性能计算芯片(如Mobileye EyeQ4/5),通过以太网接收ICAS1转发的雷达、摄像头等传感器信息,进行环境感知、路径规划和决策控制,并向制动和转向系统发送控制请求,实现L2+级别的自动驾驶功能(如自适应巡航、车道保持、自动紧急制动等)。
智能座舱域控制器(ICAS3)是MEB架构的"交互中心",采用"一机多屏"控制方式,通过以太网接收ICAS1和ICAS2的需求,控制中控屏、仪表盘、抬头显示(HUD)等交互设备,实现导航、娱乐、车辆状态显示等功能。ICAS3支持多种交互方式,如语音控制、触摸控制、手势控制等,提升了用户的座舱体验。
为了实现软件定义汽车,大众推出了自研的操作系统VW.OS,该系统基于Adaptive AUTOSAR(简称AUTOSAR AP)和面向服务的架构(SOA)设计,可实现不同应用的集成和动态部署。AUTOSAR AP是一种面向高性能计算的汽车软件架构,支持多核处理器和虚拟化技术,适合智能驾驶、智能座舱等复杂功能的开发;SOA架构则将汽车功能封装为标准化的服务,通过服务接口实现跨域调用,提升了软件的复用性和灵活性。
MEB平台的EEA已应用于大众ID.系列车型(如ID.3、ID.4、ID.6),通过域融合架构和VW.OS的结合,大众ID.系列车型实现了功能的快速迭代和用户体验的持续提升。例如,大众可通过OTA为ID.系列车型升级自动驾驶辅助功能、优化电池管理策略等,逐步缩小与特斯拉等新势力车企的软件差距。
