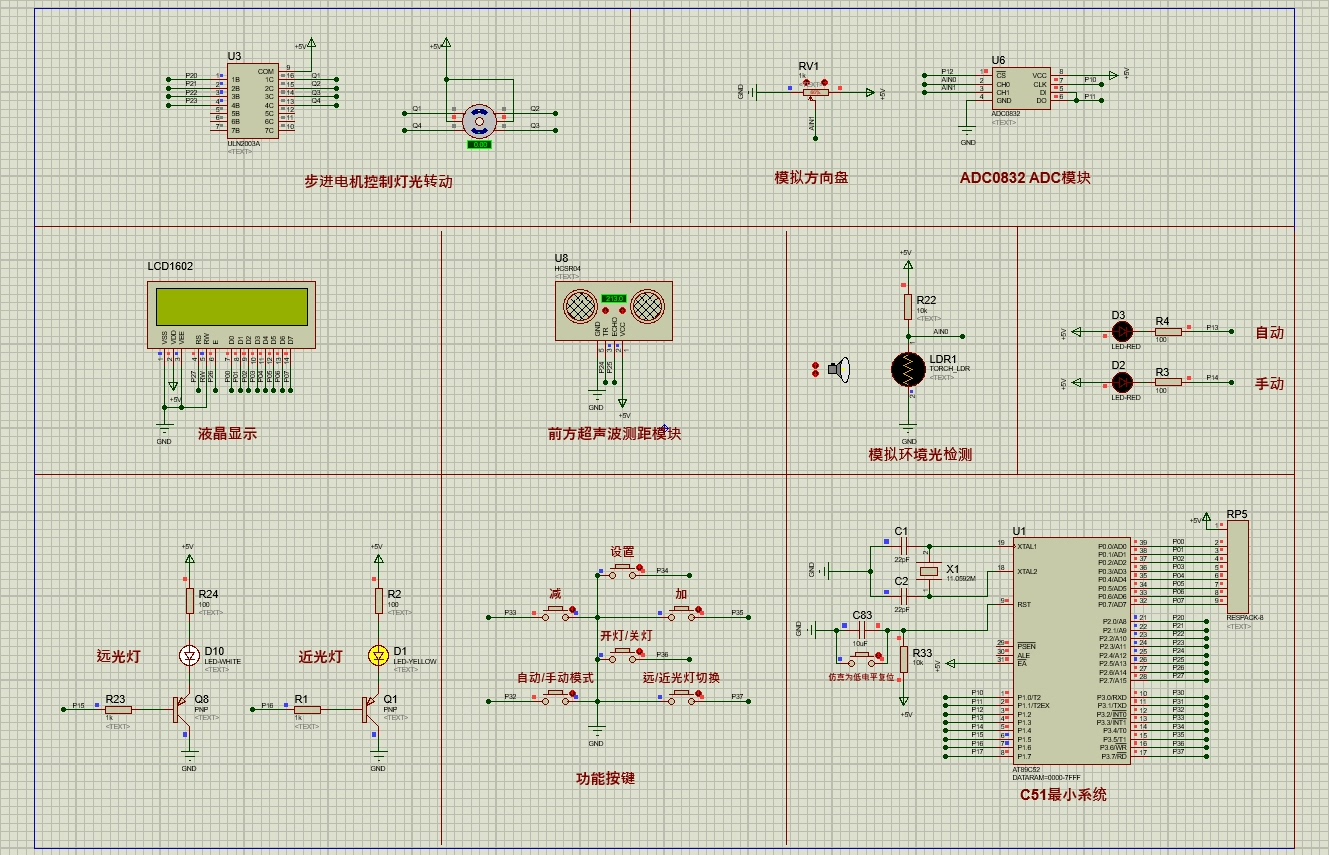
基于51单片机的汽车近光远光灯模拟仿真,可通过超声波测距模块进行距离检测,模拟环境光进行远近光灯切换,模拟方向盘转动进行随动大灯转向功能
在汽车的夜间行驶中,灯光系统起着至关重要的作用。今天咱们就来聊聊基于51单片机,如何实现汽车近光远光灯的模拟仿真,还能让它具备通过超声波测距模块检测距离、模拟环境光切换远近光灯以及模拟方向盘转动实现随动大灯转向这些超酷的功能。
硬件搭建
首先得说说硬件部分,51单片机作为核心控制单元,就像汽车的"小脑袋",负责发号施令。超声波测距模块用来检测前方障碍物距离,好比汽车的"眼睛",提前感知前方情况。还需要一些光传感器来模拟环境光,以及角度传感器来模拟方向盘转动,当然少不了控制灯光的LED灯组,近光灯和远光灯就靠它们啦。
超声波测距模块代码及分析
c
#include <reg51.h>
sbit Trig = P1^0; // 定义Trig引脚
sbit Echo = P1^1; // 定义Echo引脚
unsigned int distance;
void delay(unsigned int time) { // 延时函数
unsigned int i, j;
for(i = 0; i < time; i++)
for(j = 0; j < 1275; j++);
}
unsigned int get_distance() {
unsigned int time;
Trig = 0;
_nop_();
_nop_();
Trig = 1;
_nop_();
_nop_();
Trig = 0;
while(!Echo);
TR0 = 1;
while(Echo);
TR0 = 0;
time = TH0 * 256 + TL0;
TH0 = 0;
TL0 = 0;
distance = time * 0.017; // 计算距离
return distance;
}这段代码里,Trig和Echo分别定义了超声波模块的触发和回响引脚。delay函数是个简单的延时函数,为模块工作提供必要的等待时间。get_distance函数就比较关键啦,先给Trig一个短暂的高电平脉冲来触发超声波发射,然后等待Echo引脚变为高电平,此时开启定时器0,等Echo再次变为低电平时关闭定时器0,根据定时器记录的时间算出超声波往返的时间,进而得出距离。
环境光模拟及远近光灯切换代码及分析
c
#include <reg51.h>
sbit Light_Sensor = P2^0;
sbit High_Light = P3^0;
sbit Low_Light = P3^1;
void main() {
while(1) {
if(Light_Sensor == 0) { // 模拟环境光较暗
High_Light = 1;
Low_Light = 0;
} else { // 模拟环境光较亮
High_Light = 0;
Low_Light = 1;
}
}
}这里LightSensor**连接着模拟环境光的传感器引脚,High Light和LowLight**分别控制远光灯和近光灯。在main函数的循环里,通过检测Light Sensor引脚电平状态,判断环境光的明暗,从而控制远近光灯的点亮状态。如果环境光暗,就点亮远光灯关闭近光灯;环境光亮则反之。
随动大灯转向功能代码及分析
c
#include <reg51.h>
sbit Steering_Sensor = P1^2;
sbit Left_Light = P3^2;
sbit Right_Light = P3^3;
void main() {
while(1) {
if(Steering_Sensor < 180) { // 模拟方向盘向左转动
Left_Light = 1;
Right_Light = 0;
} else if(Steering_Sensor > 180) { // 模拟方向盘向右转动
Left_Light = 0;
Right_Light = 1;
} else { // 方向盘回正
Left_Light = 0;
Right_Light = 0;
}
}
}SteeringSensor**连接角度传感器,用来模拟方向盘转动。Left Light和RightLight**控制随动大灯的左右转向。在main函数循环中,通过判断Steering Sensor检测到的角度值,来决定左右随动大灯的亮灭。如果角度小于180,模拟向左转,点亮左随动大灯;大于180则模拟向右转,点亮右随动大灯;等于180视为方向盘回正,关闭左右随动大灯。
通过以上这些代码和硬件配合,咱们就初步实现了基于51单片机的汽车近光远光灯模拟仿真,并且让它具备了一些实用的灯光控制功能。当然,实际应用中还可以进一步优化和扩展,比如加入更复杂的逻辑判断,让灯光系统更加智能。这也算是在汽车电子领域的一次有趣小探索啦!