无人机反制技术 是通过探测、识别、干扰或摧毁目标无人机,以应对其潜在威胁的综合性系统工程。其核心原理可归纳为信号阻断 、物理拦截 、控制接管 和定向毁伤四大类,无人机侦测反制系统集成多种技术,形成探测-识别-反制闭环:
探测层:雷达、无线电频谱监测、光电跟踪。
决策层:AI分析无人机轨迹,自动匹配最优反制手段。
反制层:
远距离:GNSS欺骗+射频干扰。
中距离:激光或微波定向打击。
近距离:网捕或生物拦截。
本系统采用Avalonia11+SukiUI6.0.2开发桌面程序,实现跨平台的可视化应用程序:
1、Avalonia是一个跨平台的.NET UI框架,用于构建桌面应用程序。Avalonia 11作为其较新的版本,具有以下特点:
-
跨平台支持:可以在Windows、Linux和macOS等多个操作系统上运行,为开发者提供了一种统一的开发方式。
-
XAML支持:使用XAML作为界面描述语言,使得界面设计和代码逻辑分离更加清晰。
-
性能优化:在渲染性能和资源管理等方面进行了优化,提高了应用程序的响应速度。
2、SukiUI是一个基于Avalonia构建的现代化UI框架,提供了丰富的控件和优雅的设计风格。SukiUI 6.0.2版本的主要改进包括:
-
窗口与标题栏改进 :新增了
TitleBarAnimationEnabled属性,允许开发者控制标题栏动画效果;实现了双击标题栏切换最大化状态的功能;支持Windows 11的Snap Layout特性。 -
侧边菜单升级 :侧边菜单控件支持自定义展开面板长度和切换按钮位置,新增
IsToggleButtonVisible属性。 -
数据展示控件改进 :
DataGrid控件修复了行选择和滚动问题,TreeView样式得到优化,ListBox新增了WithoutCheck类。
3、实现功能:
-
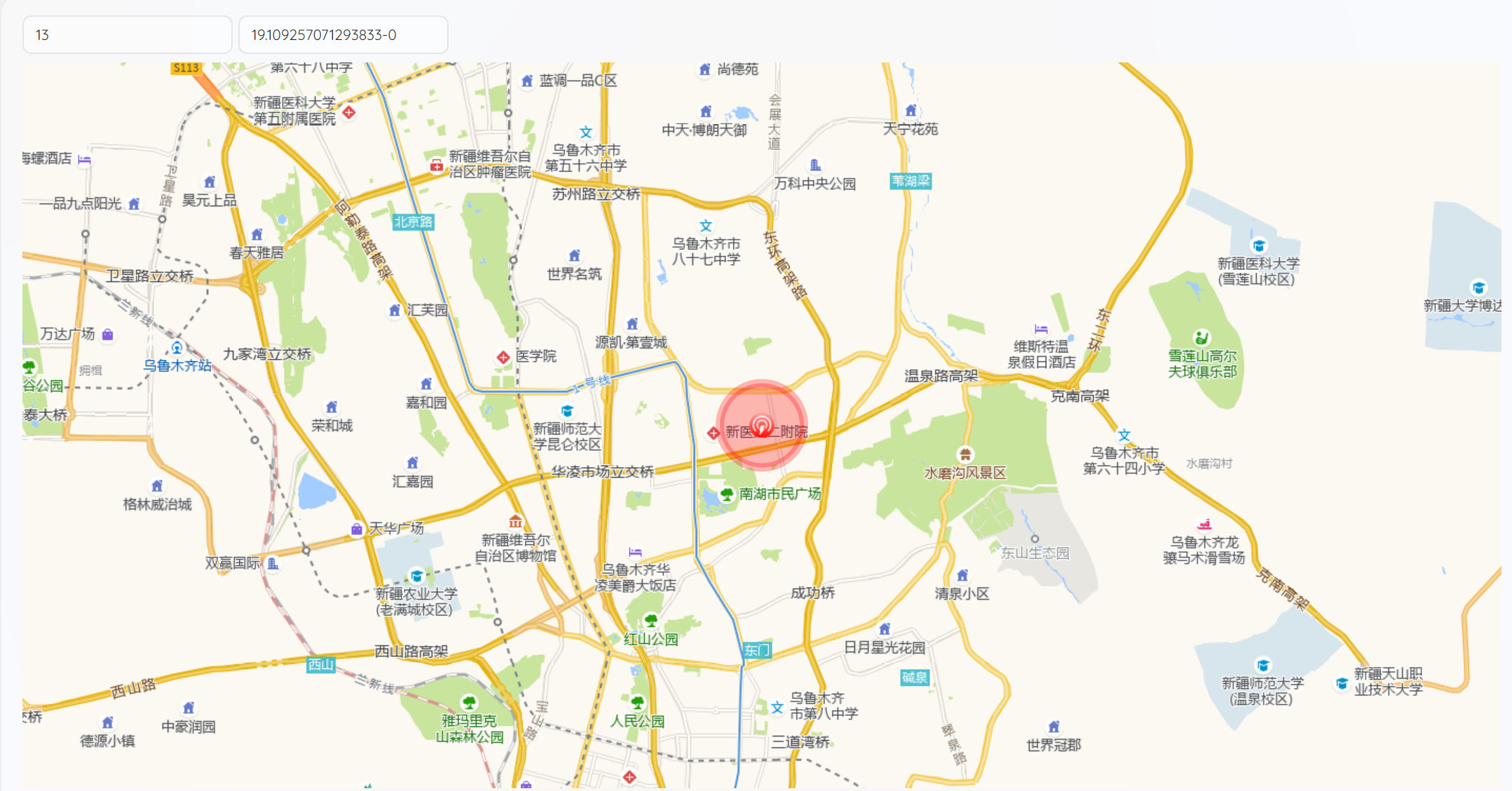
离线地图定位功能
-
任务区域地图加载:系统能够加载任务区域的离线地图基准数据包,无人机在执行任务时,通过离线地图模块获取地图数据,确保在无网络或网络受限的环境下也能正常工作。
-
目标定位:结合无人机自身的位置信息、挂载测距设备的姿态信息及测得的目标距离信息,以及离线地图基准数据包,对目标进行精确定位。
-
实时显示:在管控平台的电子地图上实时显示侦测设备的位置。
-
cs
private async Task InitializeMap()
{
// 获取MapControl实例
var mapControl = this.FindControl<MapControl>("map");
if (mapControl != null)
{
// 创建地图
try
{
await Task.Run(() =>
{
var connectionString = new SQLite.SQLiteConnectionString("create_mbtiles\\roadmap.mbtiles", false); // 替换为MBTiles文件路径
var tileSource = new BruTile.MbTiles.MbTilesTileSource(connectionString);
// 创建图层并添加到地图
var layer = new TileLayer(tileSource)
{
Name = "Offline Map",
Enabled = true, // 确保图层启用,
};
var map = new Map();
//var map = new Map
//{
// CRS = "EPSG:3857", // 设置地图的坐标系统为 Web Mercator
//};
map.Layers.Add(layer);
mapControl.Map = map;
});
await Dispatcher.UIThread.InvokeAsync(() =>
{
zoom = 13;
// 转换经纬度到地图的坐标系统
var point = new MPoint(87.62444, 43.830763); // 经度在前,纬度在后
var transformedPoint = SphericalMercator.FromLonLat(point.X, point.Y);
mapControl.Map.Navigator.CenterOn(transformedPoint.x, transformedPoint.y);
mapControl.Map.Navigator.ZoomToLevel(zoom);
TextTitle1.Text = string.Format("{0}-{1}", mapControl.Map.Navigator.Viewport.Resolution, mapControl.Map.Navigator.Viewport.Rotation);
TextTitle.Text = zoom.ToString();
mapControl.Refresh();
});
}
catch (System.Exception ex)
{
Console.WriteLine($"设置地图视图失败: {ex.Message}");
}
}
}-
雷达视图功能
-
雷达探测与显示:利用雷达系统(如2D雷达、3D雷达、有源电子扫描阵列雷达等)探测无人机的位置、速度、高度等信息,并在雷达视图中实时显示。
-
多雷达联动:支持多部雷达协同工作,形成覆盖半径3-16公里的立体监控网络,提高探测范围和精度。
-
目标识别与分类:通过雷达信号处理和分析,结合AI技术,对探测到的目标进行识别和分类,区分无人机和其他飞行物体。
-
-
画轨迹线功能
-
轨迹数据采集:实时采集无人机的飞行数据,包括经纬度、高度、时间戳等信息。
-
轨迹绘制与显示:在电子地图上根据采集到的飞行数据绘制无人机的飞行轨迹线,可显示多架无人机的轨迹,并区分不同无人机。
-
轨迹回放与分析:支持对无人机飞行轨迹的回放,方便对历史飞行数据进行分析和研究
-
