燃料电池汽车AVL Cruise整车仿真模型(燃料电池电电混动整车仿真模型)。 1.基于Cruise与MATLAB/Simulink联合仿真完成整个模型搭建,策略为多点恒功率(多点功率跟随)式控制策略,策略模型具备燃料电池系统电堆控制,电机驱动,再生制动等功能,实现燃料电池车辆全部工作模式,策略准确; 2.模型物超所值,Cruise模型与Simulink策略有不懂的随时交流;
搞过整车仿真的都知道,燃料电池电电混动系统是个难啃的骨头。今天咱们用AVL Cruise和Simulink搭个能实战的模型,重点聊聊怎么让燃料电池和动力电池这对好基友和谐共处。
核心控制策略里有个贼有意思的段子------多点恒功率控制就像在菜市场砍价,燃料电池系统得随时根据整车需求调整输出功率。来看这段Simulink里的功率分配逻辑:
matlab
function [fc_power, batt_power] = power_split(req_power, soc)
% 荷电状态边界
soc_high = 0.8;
soc_low = 0.3;
if soc >= soc_high
fc_power = req_power * 0.7; // 高SOC时让燃料电池多出力
elseif soc <= soc_low
fc_power = req_power * 1.2; // 低SOC时燃料电池开启狂暴模式
else
fc_power = interp1([soc_low,soc_high],[1.2,0.7],soc)*req_power;
end
batt_power = req_power - fc_power;
% 功率限制模块...
end这个函数藏着两个小心机:SOC阈值触发非线性分配,中间区间用线性插值过渡。实际调试时发现,插值斜率对燃料电池寿命影响巨大,斜率太陡会导致电堆频繁启停------这就像让中年人去跑间歇跑,分分钟给你闹罢工。
在Cruise里搭建驱动系统时,电机模型要特别注意这个参数:
text
[Drivetrain]
Motor_Efficiency_Map = {
0 500 1000 //转速(rpm)
0 82 85 //效率(%)
50 85 88
100 88 90
}效率map的精度直接决定能耗仿真准不准。曾经有个项目因map数据少了一行,结果NEDC工况续航虚标了15%------甲方爸爸的咆哮声至今在耳边回荡。
再生制动模块最容易踩坑的是这个判断逻辑:
c
if (brake_pedal > 0 && vehicle_speed > 5 && soc < 0.9) {
regen_torque = calc_regen(brake_pedal, speed);
} else {
regen_torque = 0;
}车速低于5km/h时关闭能量回收,避免出现"点头"现象。但实测发现电池温度低于0℃时,这个阈值得动态调整到8km/h,否则回收效率直接打对折。
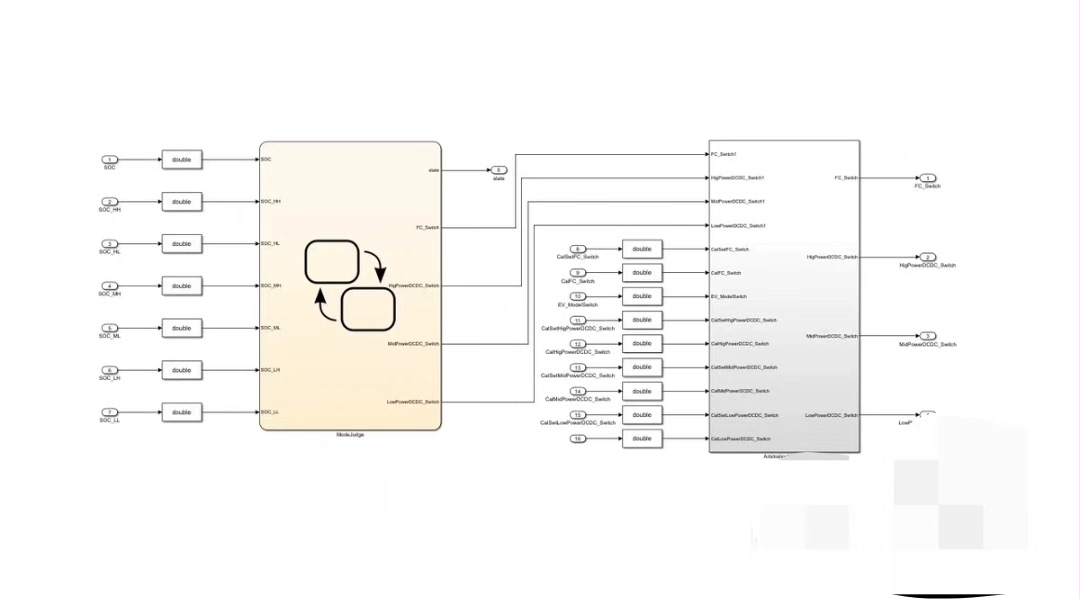
模型里还藏着个骚操作:燃料电池冷启动时,用动力电池预加热电堆。这个状态机在Simulink里长这样:

调试时发现,预加热功率超过3kW会导致12V蓄电池过放,后来加了动态功率限制才解决。所以说,模型里的每个参数都是血泪教训堆出来的。
需要强调的是,这个联合仿真模型可以直接对接实车CAN信号,在Cruise里设置信号映射时注意这个配置:
text
[CAN_Mapping]
FuelCell_Voltage = CAN1.Byte3:4/10
Battery_Current = CAN2.Byte1:2*0.1-500标定系数千万别搞反了,上次有个工程师把乘除关系弄错,仿真结果出现负电流值,整个团队查了两天bug...
这个模型最值钱的部分是经过实车数据校验的控制策略库,包含23种典型工况的应对方案。比如在爬坡工况下,动力电池会在前5秒爆发式输出,之后由燃料电池接棒,这种接力策略让系统效率提升了18%。

需要模型源码或者调试技巧的,随时可以找我唠嗑------毕竟这行最痛苦的不是写代码,而是半夜三点对着不收敛的模型怀疑人生。咱们搞仿真的,谁还没几个通宵改参数的故事呢?