文章目录
- BP:"树上聊天"的算法
- [AMP:看起来像 BP,但实际上是"BP 的简化快版"](#AMP:看起来像 BP,但实际上是“BP 的简化快版”)
- [AMP 的核心思想](#AMP 的核心思想)
-
- [要点1:AMP 很好地解决了稠密图中环路的回声](#要点1:AMP 很好地解决了稠密图中环路的回声)
- [要点2:AMP 把复杂的 BP 消息变成了"几个简单公式"](#要点2:AMP 把复杂的 BP 消息变成了“几个简单公式”)
- 要点3:从公式的角度上理解回声
BP:"树上聊天"的算法
BP算法算的是一个精确的边缘概率,它做的是:因子图里面,每个节点(变量、因子)互相传消息。每个节点把邻居给的消息 相乘、求和,再发给其他邻居,最后推出来真正的边缘概率。
直觉上可以这样理解:BP = 每个节点都把"自己的意见 + 别人意见 "汇总,然后传下一个。
像一棵树里大家互相问意见,问着问着就知道答案了。
BP 是个 精确算法 ,特别是在"树形结构"时效果完美。(如果不知道BP算法原理的可以看我主页讲BP的那篇文章: 【一】 和 【二】)
AMP:看起来像 BP,但实际上是"BP 的简化快版"
AMP(Approximate Message Passing) 出现的场景:常在压缩感知(Compressed Sensing)里用,比如你要从少量观测 y y y 里恢复高维向量 x x x,数学模型是:
y = A x + 噪声 y = A x + 噪声 y=Ax+噪声
这对应的因子图:
- 是非常稠密的
- 不是树!
- 有大量环
- 节点数目巨大(成千上万)
在这种图上直接跑 BP 会累死自己(计算量爆炸)。
AMP 的核心思想
AMP其实想这样做: "BP 太慢了,我能不能只保留 BP 的主要效果,把复杂的部分近似掉?",这个是因为在稠密场景下,不同变量对因子的贡献其实是近似的,于是就得到 AMP ------一个跟 BP 非常像但超级简化的算法。
要点1:AMP 很好地解决了稠密图中环路的回声
你可以把它理解为: 在复杂的因子图里(很多环),同一个节点的消息会绕一圈又回到自己身上,就像"回声"。
普通 BP 会把这个"回声"当成新的信息,所以会产生错误的推断,所以BP 聊天会被自己的回声骗到 。而AMP 会自动加一个"减掉回声"的项,会说:"等等,这句可能是我自己上次说的话绕回来了,我把它减掉。"
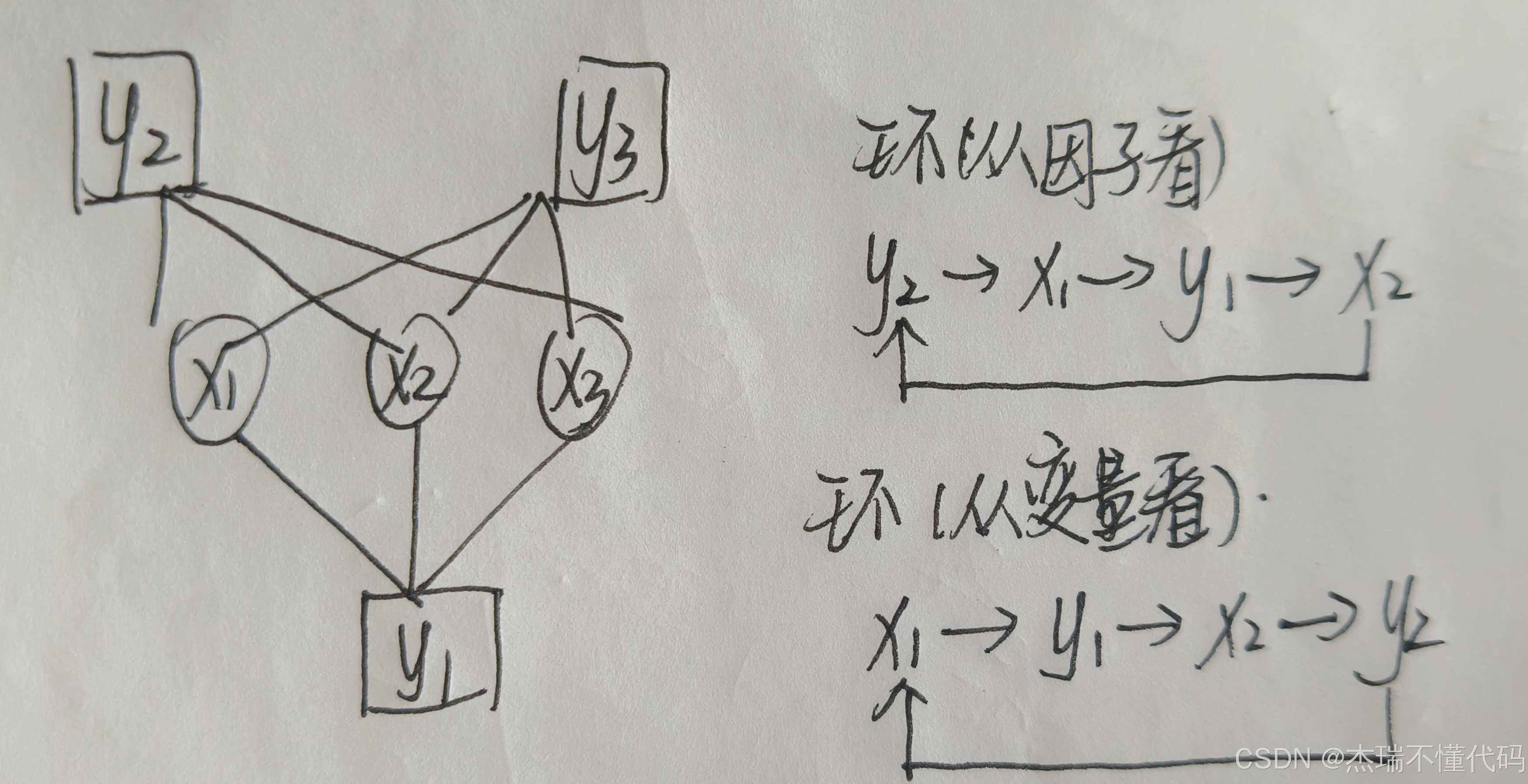
我们通过以下方式来理解这个回声,首先从直观上可以看下面这个图,由于很稠密,因此存在很多环,我在图中只是写了其中的一个,实际上还有像 y 1 → x 1 → y 3 → x 2 y_1→x_1→y_3→x_2 y1→x1→y3→x2这样的很多类似的环路,这都会给BP的估计带来麻烦,因为引入了回声(之前的变量节点接收到自己的回声,会更确信这个信念是对的,因此就会往错误的方向进行更新)。
当然如果这里直接上公式,肯定大部分人就直接懵了,所以我还是先给大家普及一下AMP到底是怎么做的。
要点2:AMP 把复杂的 BP 消息变成了"几个简单公式"
在 BP 里,消息是函数,变量到因子: n ( x ) n(x) n(x)、因子到变量: m ( x ) m(x) m(x),有点复杂。
在 AMP 里,所有消息被简化成:
- 一个残差 r r r
- 一个估计 x x x
- 一个简单的标量修正项
这比 BP 的"乘消息、求和、再发回去"要简单太多了。BP 要传好多复杂意见,AMP 只传简单几句话,而且还会自动消除回声。
AMP 不求精确,只求"平均意义下的好解",BP 适用于树结构,会给出准确的边缘概率。AMP 适用于高维随机矩阵 A,会给出非常准确但不严格精确的结果 ------但这种"高维平均意义上的准确"在压缩感知里已经很好用了。
以一个线性高斯模型为例,我们先看BP是怎么做的:
y = A x + w , w ∼ N ( 0 , σ 2 I ) y = Ax + w,\quad w \sim \mathcal N(0,\sigma^2 I) y=Ax+w,w∼N(0,σ2I)
假设先验是可分解的 :
p ( x ) = ∏ j = 1 N p X ( x j ) p(x) = \prod_{j=1}^N p_X(x_j) p(x)=j=1∏NpX(xj)
那么联合分布可以写成因子分解形式:
p ( x , y ) ∝ ∏ j p X ( x j ) ⏟ 先验因子 ⋅ ∏ p ( y i ∣ x ) ⏟ 观测因子 p(x,y) \propto \underbrace{\prod_{j} p_X(x_j)}{\text{先验因子}}\cdot \underbrace{\prod p(y_i \mid x)}{\text{观测因子}} p(x,y)∝先验因子 j∏pX(xj)⋅观测因子 ∏p(yi∣x)
这里是由基础的贝叶斯定理 p ( x , y ) = p ( x ) p ( y ∣ x ) p(x, y) = p(x) p(y | x) p(x,y)=p(x)p(y∣x),其中假设各 x j x_j xj 可分,则 p ( x ) = ∏ j = 1 N p X ( x j ) p(x) = \prod_{j = 1}^{N} p_X(x_j) p(x)=∏j=1NpX(xj),同时如果每个观测 y i y_i yi 受到独立噪声影响,则 p ( y ∣ x ) = ∏ i = 1 M p ( y i ∣ x ) p(y|x) = \prod_{i = 1}^{M} p(y_i|x) p(y∣x)=∏i=1Mp(yi∣x),因此可以得到 p ( x , y ) = p ( x ) p ( y ∣ x ) = ( ∏ j p X ( x j ) ) ( ∏ i p ( y i ∣ x ) ) p(x, y) = p(x) p(y|x) = \left( \prod_{j} p_X(x_j) \right) \left( \prod_{i} p(y_i|x) \right) p(x,y)=p(x)p(y∣x)=(∏jpX(xj))(∏ip(yi∣x))
对每个观测 y i y_i yi,在这个线性高斯模型下有:
p ( y i ∣ x ) ∝ exp ( − 1 2 σ 2 ( y i − ∑ k A i k x k ) 2 ) p(y_i \mid x) \propto \exp\left( -\frac{1}{2\sigma^2}\big(y_i - \sum_k A_{ik} x_k \big)^2 \right) p(yi∣x)∝exp(−2σ21(yi−k∑Aikxk)2)
这是因为,如果我们按维度展开: y i = ∑ j A i j x j + w i , w i ∼ N ( 0 , σ 2 ) y_i = \sum_{j} A_{ij} x_j + w_i, \quad w_i \sim \mathcal{N}(0, \sigma^2) yi=∑jAijxj+wi,wi∼N(0,σ2),因为噪声是高斯的,所以我们给定 x , y i x,y_i x,yi 的条件概率是: p ( y i ∣ x ) = N ( y i ; ∑ j A i j x j , σ 2 ) p(y_i|x) = \mathcal{N} \left( y_i; \sum_{j} A_{ij} x_j, \sigma^2 \right) p(yi∣x)=N(yi;∑jAijxj,σ2),因此写成概率密度函数的形式: p ( y i ∣ x ) = 1 2 π σ 2 exp ( − 1 2 σ 2 ( y i − ∑ j A i j x j ) 2 ) p(y_i|x) = \frac{1}{\sqrt{2\pi\sigma^2}} \exp \left( -\frac{1}{2\sigma^2} \left( y_i - \sum_{j} A_{ij} x_j \right)^2 \right) p(yi∣x)=2πσ2 1exp(−2σ21(yi−∑jAijxj)2)
于是对应的因子节点(记作 f i f_i fi)就是:
f i ( x ) : = p ( y i ∣ x ) ∝ exp ( − 1 2 σ 2 ( y i − ∑ k A i k x k ) 2 ) f_i(x) := p(y_i\mid x) \propto \exp\left( -\frac{1}{2\sigma^2}\big(y_i - \sum_k A_{ik} x_k \big)^2 \right) fi(x):=p(yi∣x)∝exp(−2σ21(yi−k∑Aikxk)2)
在因子图上,BP 有两种消息:
- 变量节点 x j x_j xj→ 因子节点 f i f_i fi: n j → i ( x j ) n_{j\to i}(x_j) nj→i(xj)
- 因子节点 f i f_i fi → 变量节点 x j x_j xj: m i → j ( x j ) m_{i\to j}(x_j) mi→j(xj)
通用 sum-product 规则: 因子 → 变量:
m i → j ( x j ) ∝ ∫ f i ( x ) ∏ k ≠ j n k → i ( x k ) , d x k ≠ j m_{i\to j}(x_j) \propto \int f_i(x) \prod_{k\neq j} n_{k\to i}(x_k), d x_{k\neq j} mi→j(xj)∝∫fi(x)k=j∏nk→i(xk),dxk=j
也就是:固定 x j x_j xj,把因子上连着的其他变量 x k ( k ≠ j ) x_k(k\neq j) xk(k=j) 都积分掉。现在把刚刚的 f i ( x ) f_i(x) fi(x) 代入上面公式:
f i ( x ) ∝ exp ( − 1 2 σ 2 ( y i − ∑ k A i k x k ) 2 ) f_i(x) \propto \exp\left( -\frac{1}{2\sigma^2} \left( y_i - \sum_k A_{ik} x_k \right)^2 \right) fi(x)∝exp −2σ21(yi−k∑Aikxk)2
代入因子消息公式:
m i → j ( x j ) ∝ ∫ exp ( − 1 2 σ 2 ( y i − ∑ k A i k x k ) 2 ) ∏ k ≠ j n k → i ( x k ) d x k ≠ j = ∫ exp ( − 1 2 σ 2 ( y i − ∑ k ≠ j A i k x k − A i j x j ) 2 ) ∏ k ≠ j n k → i ( x k ) d x k \begin{aligned} m_{i\to j}(x_j) &\propto \int \exp\left( -\frac{1}{2\sigma^2} \left( y_i - \sum_k A_{ik} x_k \right)^2 \right) \prod_{k\neq j} n_{k\to i}(x_k)d x_{k\neq j}\\ &= \int \exp\left( -\frac{1}{2\sigma^2} \left( y_i - \sum_{k\neq j} A_{ik} x_k - A_{ij} x_j \right)^2 \right) \prod_{k\neq j} n_{k\to i}(x_k)d x_{k} \end{aligned} mi→j(xj)∝∫exp −2σ21(yi−k∑Aikxk)2 k=j∏nk→i(xk)dxk=j=∫exp −2σ21 yi−k=j∑Aikxk−Aijxj 2 k=j∏nk→i(xk)dxk
因此在BP中,因子节点向变量节点的消息包含:
m i → j ( x j ) ∝ ∫ exp ( − 1 2 σ 2 ( y i − ∑ k ≠ j A i k x k − A i j x j ) 2 ) ∏ k ≠ j n k → i ( x k ) d x k (标记式 1 ) m_{i\to j}(x_j) \propto \int \exp\left( -\frac{1}{2\sigma^2} \left( y_i - \sum_{k\neq j} A_{ik} x_k - A_{ij} x_j \right)^2 \right) \prod_{k\neq j} n_{k\to i}(x_k)d x_k (标记式1) mi→j(xj)∝∫exp −2σ21 yi−k=j∑Aikxk−Aijxj 2 k=j∏nk→i(xk)dxk(标记式1)
这个积分对所有变量节点求和,非常复杂。但是 AMP 完全不做这种求和 ,因为在压缩感知里面,因子数量成千上万,这种求和根本算不动。AMP[1](#1) (Bayati & Montanari 2011) 使用的是:
- 高维极限(N→∞)下,因子 → 变量 的消息可以被高斯化
- 所以整个"边缘概率"可以被一个简单的去噪函数(denoiser) 代替:
x t + 1 = η ( A T r t + x t ) x^{t+1} = \eta( A^T r^t + x^t ) xt+1=η(ATrt+xt)
其中 t t t 可以看成迭代次数, η η η 就是近似"边缘概率"的函数,也就是说等迭代结束的时候,我就可以用最后一步的 x x x 来近似这个边缘概率。AMP 把从变量流向因子的消息"折叠"为向量 x x x,BP 的:每条边一个函数消息 n k → i ( x k ) n_{k\to i}(x_k) nk→i(xk),就变成AMP口中的:"所有边的消息都长得差不多,我干脆用一个全局向量 x x x 来代表所有 n n n 消息 ",结果就是 n k → i ( x n ) ⟹ x k t n_{k \to i}(x_n) \Longrightarrow x_k^t nk→i(xn)⟹xkt。
那我们再回到标记式1,在这个式子中,传递的是因子→变量,这是 BP 最难算的一步:乘所有邻居消息 → 对所有变量求和"但是AMP 假设:
-
测量矩阵 A 随机且稠密
-
根据中心极限定理 此过程可以近似为高斯分布
于是:
r t = y − A x t + 1 δ r t − 1 ⟨ η ′ ( v t − 1 ) ⟩ r^t = y - A x^t + \frac{1}{\delta} r^{t-1} \langle \eta'(v^{t-1}) \rangle rt=y−Axt+δ1rt−1⟨η′(vt−1)⟩
这里的最后一项 Onsager correction 就是 BP 中因为有很多环而产生的"回声项"的修正。其中各个变量的含义如下:
| 符号 | 含义 |
|---|---|
| x t x^t xt | 第 t t t 轮的信号估计 |
| r t r^t rt | 第 t t t 轮的残差 |
| v t − 1 = x t − 1 + A T r t − 1 v^{t-1}=x^{t-1} + A^T r^{t-1} vt−1=xt−1+ATrt−1 | 上一轮变量节点收到所有因子消息后的 综合意见 |
| A T r t A^T r^t ATrt | 因子节点向变量节点的消息汇总 |
| η ( ⋅ ) \eta(\cdot) η(⋅) | 先验对应的去噪器(后验均值) |
| η ′ ( v t − 1 ) \eta'(v^{t-1}) η′(vt−1) | 去噪器对输入的敏感度(局部放大因子) |
| ⟨ η ′ ( v t − 1 ) ⟩ \langle\eta'(v^{t-1})\rangle ⟨η′(vt−1)⟩ | 所有节点敏感度的平均 |
| δ = M / N δ = M/N δ=M/N | 测量比(M代表测量数,N代表未知维数) |
接下来我们把这些符号组合起来看,理解一下整个残差公式,把它拆成三部分:
r t = y − A x t + 1 δ r t − 1 ⟨ η ′ ( v t − 1 ) ⟩ r^t = y - A x^t + \frac{1}{\delta} r^{t-1} \langle \eta'(v^{t-1}) \rangle rt=y−Axt+δ1rt−1⟨η′(vt−1)⟩
第一部分:普通的残差 : y − A x t y - A x^t y−Axt,简单理解为:"当前估计 x t x^t xt 解释不了的部分。"
第二部分:Onsager correction : 1 δ r t − 1 ⟨ η ′ ( v t − 1 ) ⟩ \frac{1}{\delta} r^{t-1}\langle \eta'(v^{t-1}) \rangle δ1rt−1⟨η′(vt−1)⟩,这是 BP 在稠密有环图上的修正项,由于AMP 的因子图非常稠密,BP 会产生"回声", η ′ η' η′ 衡量估计会放大多少回声, r t − 1 r^{t-1} rt−1 是上一轮的回声源,乘上 η ′ η' η′ 的均值再缩放 δ δ δ 就得到"应当抵消的残差部分"。
由于 AMP 把所有消息折叠成两个向量 x x x 与 r r r:
x t + 1 = η ( A T r t + x t ) r t = y − A x t + Onsager correction x^{t+1}=\eta(A^Tr^t+x^t)\\ r^{t}=y-Ax^t+\text{Onsager correction} xt+1=η(ATrt+xt)rt=y−Axt+Onsager correction
这一步就把所有 BP 消息一次性计算完了。 因此来说,在BP中我们有叶子变量和叶子因子的说法,即
- 叶子变量→因子: n k → i ( x k ) = 1 n_{k\to i}(x_k) =1 nk→i(xk)=1
- 叶子因子→变量: m i → j ( x j ) = f i ( x j ) m_{i\to j}(x_j) = f_i(x_j) mi→j(xj)=fi(xj)
计算的时候从叶子往根传,来启动因子图的计算,但是AMP只有两个要更新的向量 x x x 与 r r r,一般初始化为:
- 初始 x x x 通常设为 0
- 初始残差 r 0 = y r⁰ = y r0=y
所以两者的主要不同可以表示为下表:
| BP 做的事 | AMP 如何改善 |
|---|---|
| 精确边缘化 | 用去噪函数替代,不做求和 |
| 变量→因子消息 = 乘函数 | 消息被折叠为向量 x x x |
| 因子→变量消息 = 求和 × 乘积 | 变成残差 r r r 的线性算子 + 校正项 |
| 叶子节点规则 | AMP 没有叶子概念 |
| 按图结构传递消息 | AMP 全局一次性更新,无需传递 |
| 最终边缘 = 消息乘积 | AMP 最终估计 = 去噪输出,不归一化 |
BP 的复杂度随图的连接数爆炸增长。AMP 的复杂度基本等于:做几次矩阵乘法( A A A 和 A T Aᵀ AT),速度相当快。可以理解为:
BP:我适合小规模、树状问题。
AMP:我适合超大模型,几万维都能飞快跑。
要点3:从公式的角度上理解回声
在本文一开始,我只是给了一张简单的图,告诉回声是怎么来的,现在我们已经有了基本的AMP的处理思想,那我们用一个具体的矩阵来说明这个问题,还记得我们之前讲过 3×3 的因子图吗:
- 因子: f 1 , f 2 , f 3 f_1,f_2,f_3 f1,f2,f3
- 变量: x 1 , x 2 , x 3 x_1,x_2,x_3 x1,x2,x3
矩阵:
A = a 11 a 12 a 13 a 21 a 22 a 23 a 31 a 32 a 33 A = \begin{bmatrix} a_{11} & a_{12} & a_{13} \\ a_{21} & a_{22} & a_{23} \\ a_{31} & a_{32} & a_{33} \end{bmatrix} A= a11a21a31a12a22a32a13a23a33
例如变量 x 1 x_1 x1 的从因子来的消息是:
x 1 t + 1 = η ( x 1 t + ∑ i a i 1 r i t ) x_1^{t+1} = \eta\left(x_1^t + \sum_i a_{i1} r_i^t\right) x1t+1=η(x1t+i∑ai1rit)
而这个 r i t r_i^t rit 是什么? ,按照 BP,它是从因子来的新消息,但实际上,注意看这行里面有 a i 1 x 1 t a_{i1} x_1^t ai1x1t:
r i t = y i − ∑ j a i j x j t r_i^t = y_i - \sum_j a_{ij} x_j^t rit=yi−j∑aijxjt
所以出现了如下循环: x 1 t x_1^t x1t 进入 r i t r_i^t rit,再通过 A T r t A^T r^t ATrt 回到 x 1 t + 1 x_1^{t+1} x1t+1,这个"自己影响自己"的路径不是一次,而是每轮都会发生:
x 1 t → r 1 t → x 1 t + 1 x_1^t \to r_1^t \to x_1^{t+1} x1t→r1t→x1t+1
它会导致:
- BP 以为得到了大量新信息
- 实际上多数是「伪消息」(自己的回声)
- 所以更新会偏得特别厉害、或者震荡、甚至发散
而Onsager correction 解决的就是这件事。 另外需要澄清一点的是:AMP 简化了那么多步骤,是否和因子图没关系了? 但是实际上AMP 仍然完全基于因子图(BP 简化),只是它把:
- 所有边的函数消息全部折叠进 → 两个全局向量( x x x、 r r r)
当然本文只是简单地将BP算法和AMP算法进行了对比,一些细节例如 高斯极限下是如何进行近似的,由于篇幅原因,并没有讲的很清楚,那么在下一期,尽量给大家把这个问题讲明白,我是不懂代码的杰瑞学长,我们下期再见!
- Bayati M, Montanari A. The dynamics of message passing on dense graphs, with applications to compressed sensingJ. IEEE Transactions on Information Theory, 2011, 57(2): 764-785. ↩︎