目录

1.摘要
本文针对水下物联网(IoUT)中环境未知、搜索困难等关键问题,提出了一种基于多算法融合的水下全覆盖搜索方法,方案综合运用了改进的 Voronoi 聚类策略、全维度自适应人工蜂群(ABC)算法、改进的视线(LOS)路径平滑技术以及人工势场(APF)动态避障方法,实现了对未知水下区域的高效移动目标搜索。Voronoi 聚类用于区域划分与任务分配;ABC 算法负责生成全局搜索路径,并通过改进 LOS 技术进行优化;在航行过程中,AUV 可依据 APF 方法实现局部避障与动态路径调整。
2.系统模型
任务模型
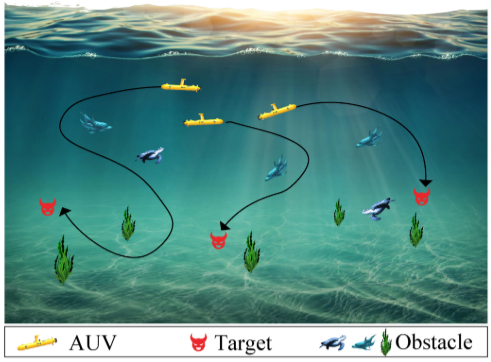
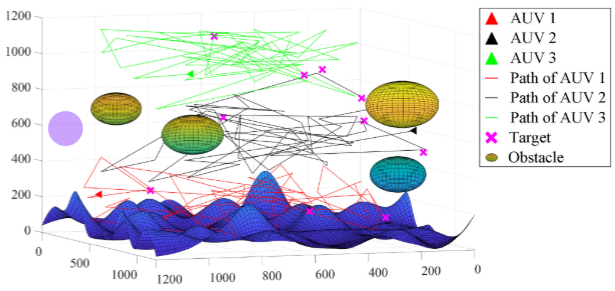
任务场景为一个矩形水下区域,内部存在若干未知目标,以及部分已知(地形、结构物)与未知(漂浮物、鱼群等)的混合障碍物。为提升搜索效率,系统需利用多台 AUV 对该区域执行全覆盖搜索,且出于安全考虑采用被动感知方式。任务区域为含有未知目标与混合障碍物的矩形水域。区域根据距离、负载与连贯性划分为 M M M个子区域,分别由 M M M台 AUV 负责搜索。每台 AUV 采用全局路径规划提升覆盖率,结合局部规划进行避障,以实现高效、安全的全覆盖搜索。
环境模型
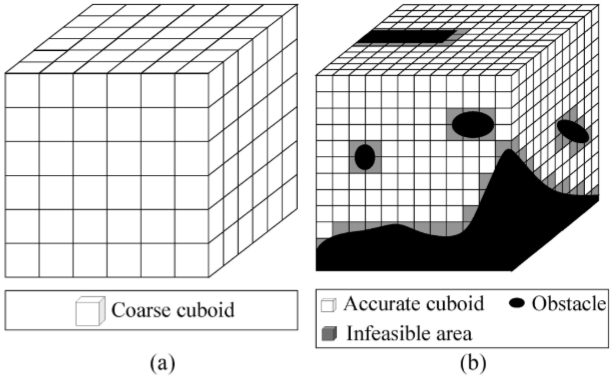
任务区域被划分为可行与不可行区域,并采用两类立方体模型:粗立方体建模(用于任务分配),基于 AUV 探测范围,将区域划分为边长为 S L c = 2 R d SL_{c}=\sqrt{2}R_{d} SLc=2 Rd的粗立方体,每个粗立方体中心视为一个任务点。精细立方体建模(用于路径规划),在粗立方体基础上进一步细分,边长设为 S L a = ( 1 / q ) S L c SL_a=(1/q)SL_c SLa=(1/q)SLc,以=生成更多 waypoint 便于避障。通过对不确定障碍物添加安全边界(扩张轮廓)来提高局部避障的安全性,减少 AUV 与障碍物碰撞的风险。
3.基于混合算法的全覆盖搜索方法
任务分配算法
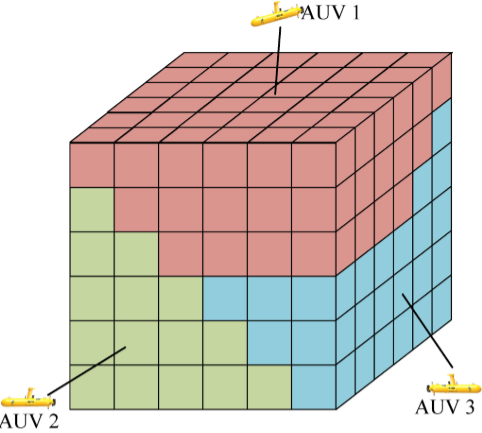
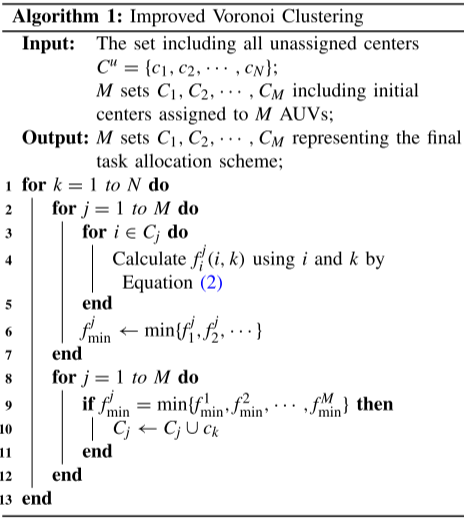
本节提出了改进Voronoi聚类策略用于多 AUV 任务分配。传统方法以最短到达时间为准则,容易导致子区域不连续、任务分配不均,从而产生冗余搜索并拉长任务时间。为解决这些问题,研究将目标函数改为基于中心点之间的距离并加入任务负载项,使区域划分既保持空间连续性,又能维持 AUV 之间的任务均衡。先为每台 AUV 分配最近的中心作为起点,再根据改进的目标函数逐步分配剩余中心点。
路径规划算法
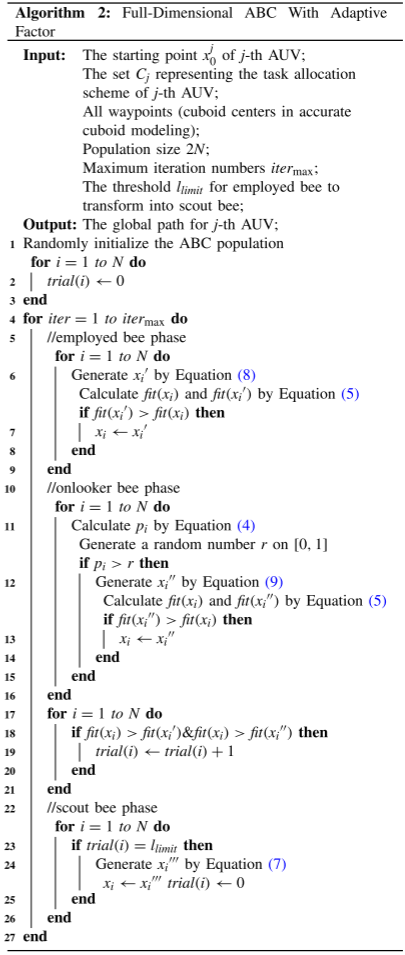
路径规划包含全局规划、路径平滑与局部避障三个部分。全局路径由改进人工蜂群算法生成,该算法以多条随机初始路径作为食源,通过雇佣蜂、观察蜂与侦察蜂的协同搜索不断优化解,以避免局部最优并提高全局搜索能力。路径质量综合由覆盖率、路径长度代价与转向代价共同衡量,算法据此迭代选择更优路径,从而生成覆盖充分、长度较短且转向平滑的全局搜索路径。
f ( x i ) = γ n t o t a l n i + δ d ( x i ) + η ( t + ( x i ) + 1 ∣ t − ( x i ) ∣ ) f(x_i)=\gamma\frac{n_{\mathrm{total}}}{n_i}+\delta d(x_i)+\eta\left(t^+(x_i)+\frac{1}{\left|t^-(x_i)\right|}\right) f(xi)=γnintotal+δd(xi)+η(t+(xi)+∣t−(xi)∣1)
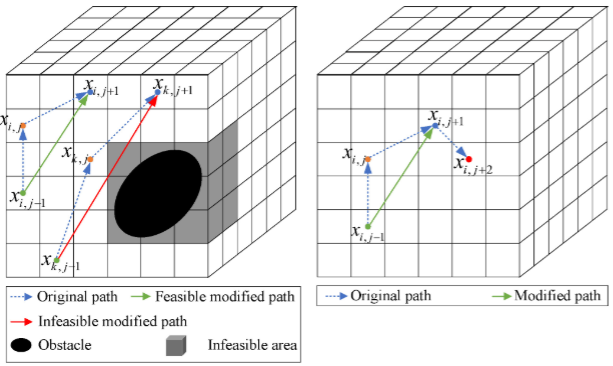
为避免过度平滑导致转角过大,在 LOS 判断基础上加入角度偏差阈值,只有同时满足可见性与角度变化可接受时才移除路径点,从而得到更稳定的 SLOS 平滑路径。在局部避障中,当全局路径穿过不可行区域时,基于人工势场重新规划局部轨迹:目标点产生吸引力,障碍物产生排斥力,AUV依据合力方向选择下一 waypoint,从而动态绕过障碍并返回全局路径。
4.结果展示
5.参考文献
1 Han G, Lai W, Wang H, et al. Hybrid-algorithm-based full coverage search approach with multiple AUVs to unknown environments in internet of underwater thingsJ. IEEE Internet of Things Journal, 2023, 11(6): 11058-11072.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx