一前言
今天是周五,感觉时间过的好快,上周这个时候我还被病痛折磨,写人像识别,大家今天可以好好休息一下,但是今天我依旧奉上一篇重要的内容,大家周五快乐。
二主要内容--霍夫线/圆变换
一霍夫线变换
实际应用场景
-
文档扫描(检测文档边缘)
-
道路车道线检测
-
建筑图像中的直线检测
-
工业视觉中的边缘对齐检测
理论
如果您能够以数学形式表示该形状,则霍夫变换是一种用于检测任何形状的流行技术。它可以检测到形状,即使它被破坏或扭曲一点点。我们将看到它如何适用于生产线。
一条线可以表示为 y=mx+c 或以极坐标形式 表示为其中 是垂线从原点到直线的距离。
是垂线从原点到直线的距离。 是这条垂直线形成的角度,水平轴是逆时针测量的(该方向因你代表坐标系而变化。这种表示用于 OpenCV )。检查下图
是这条垂直线形成的角度,水平轴是逆时针测量的(该方向因你代表坐标系而变化。这种表示用于 OpenCV )。检查下图
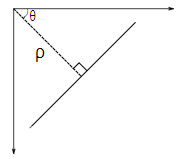
所以如果这条线经过原点以下,它会有一个小于 180 度的正角度。如果它在原点上方,我们不是取一个大于 180 的角,而是取一个小于 180 的负角度。任何垂直线都是 0 度,水平线是 90 度。
现在我们来看看霍夫变换是怎么作用于直线的。任何线都可以被表示成这两项 。所以首先它创建了一个二维数组,或者是累加器(来保存这两个参数的值)然后他设置作为初始值。 令(二维数组的)行表示,令列表示 。数组的大小取决于你需要的精准度。假设说你想要角度的精度是精确到 1 度,那你就需要 180 列。而对于来说,最大可能的距离是图像的对角线长度。因此,要精确到一个像素的程度,行数应该是图像的对角长度。
。所以首先它创建了一个二维数组,或者是累加器(来保存这两个参数的值)然后他设置作为初始值。 令(二维数组的)行表示,令列表示 。数组的大小取决于你需要的精准度。假设说你想要角度的精度是精确到 1 度,那你就需要 180 列。而对于来说,最大可能的距离是图像的对角线长度。因此,要精确到一个像素的程度,行数应该是图像的对角长度。
想象有一张 100x100 的图像,它上面有一条水平的线条在图像正中间。取这条线的第一个点,你知道它的坐标 (x,y)值。现在,按照这条直线的等式,把值带入,并且查看你获取到的值。对每一对,我们都把它们在累加器中对应的值计数增加 1。而此时,在这个计数器中,单元 (50,90) 和其他单元一样计数等于 1。
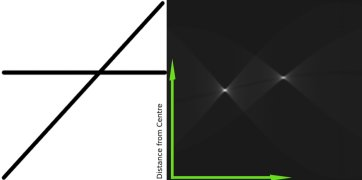
现在去这条线上的第二个点,重复上面的步骤。增加单元中你拿到的对应的值(rho, theta)。这一次,单元(50,90)的计数增到到了 2。你实际上做的是投票投出值。你不断为这条直线上所有的点继续这个过程。在每一个点,单元(50,90)都会得票,而其他的单元有可能会得票,也有可能不会。按这个方案,最终单元 (50,90) 会获得最高的投票(译者注:在 100X100 的图像正中水平的直线到原点距离为 50,垂角 90 度)。所以最终搜索我们的累加器来找最高得票的单元,我们就会取到 (50,90),这就说明图像中有一条线距离原点垂距 50,它过原点的垂线和水平线夹角为 90 度。这个过程很好的显示在了以下的动画中。(图片提供: Amos Storkey )
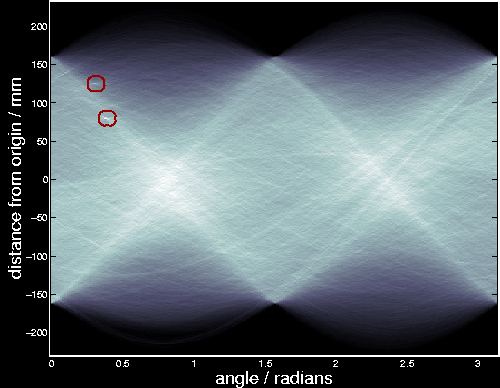
这就是霍夫变化针对直线工作的原理。非常简单,也许你可以用 Numpy 自己来实现它。以下是一张显示了累加器的图像。在某些地方的亮点说明它们是图像中可能线条的参数。(图片提供:维基百科)
其实不用搞太明白,这是涉及原理的,我们暂时用不到,等用到的时候我会再次提到的。
OpenCV 中的霍夫变换
上面解释的这一堆东西,在 OpenCV 里都封装起来成为**cv.HoughLines()** 函数了。
lines = cv.HoughLines(image, rho, theta, threshold, lines\[, srn\[, stn\[, min_theta\[, max_theta]]]])
必需参数:
-
image: 输入图像(8位单通道二值图像)
-
rho: ρ 的精度(以像素为单位)
-
theta: θ 的精度(以弧度为单位)
-
threshold: 累加器阈值(只有得票数超过此值的直线才会被检测出来)
可选参数:
-
lines: 输出线向量(通常不用手动指定)
-
srn, stn: 多尺度霍夫变换参数
-
min_theta, max_theta: 检测的角度范围
返回值
返回一个 NumPy 数组,形状为 (n, 1, 2),其中:
-
n是检测到的直线数量 -
每条直线由
(ρ, θ)表示-
ρ: 直线到原点的距离 -
θ: 直线的角度(弧度制)
-
它简单的返回了一个:math:(rho, theta)`值得数组。的单位是像素, 的单位是弧度。第一个参数,输入图像应该是个二元图像,所以在应用霍夫线性变换之前先来个阈值法或者坎尼边缘检测。第二、第三参数分别是 和 的精度。第四个参数则是一个阈值,它代表了一个单元被认为是一条直线需要获得的最低票数。要记住的是,得票数其实取决于这条直线穿过了多少个点。所以它也代表了应被检测出的线条最少有多长。
python
import cv2
import numpy as np
# 读取棋盘图像
image_path = 'path_to_your_chessboard_image.jpg'
img = cv2.imread(image_path)
original_img = img.copy()
# 转换为灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 边缘检测
edges = cv2.Canny(gray, 50, 150, apertureSize=3)
# 霍夫线变换检测直线
lines = cv2.HoughLines(edges, 1, np.pi/180, threshold=150)
# 绘制检测到的直线
if lines is not None:
for line in lines:
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
# 计算直线的两个端点
length = 1000 # 足够长的线
pt1 = (int(x0 + length*(-b)), int(y0 + length*(a)))
pt2 = (int(x0 - length*(-b)), int(y0 - length*(a)))
# 绘制直线
cv2.line(img, pt1, pt2, (0, 0, 255), 2)
# 显示结果
cv2.imshow('Original', original_img)
cv2.imshow('Detected Lines', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
如果大家不知道用什么图像可以找一张棋盘的照片。
效果如下
概率 Hough 变换
在霍夫变换中,你可以发现即使是一条仅有两个参数的直线,也需要用到大量的计算。概率霍夫变换是我们已知的,针对霍夫变换的优化方案。它不去取所有的点来列入考虑,取而代之的是取足够完成直线检测的这些点的随机子集。只要我们把阈值下调一点。下图在霍夫空间中比较了霍夫变换与概率霍夫变换(建议记住这个,用这个,效果更好)
OpenCV 实现基于使用 Matas,J。和 Galambos,C。和 Kittler,J.V。 133 的渐进概率 Hough 变换的线的鲁棒检测。使用的函数是 cv.HoughLinesP() 。它比之前介绍的函数多出来两个参数:
lines = cv.HoughLinesP(image, rho, theta, threshold, lines\[, minLineLength\[, maxLineGap]])
- minLineLength - 最小线长。比这个值小的线条会被丢弃。
- maxLineGap - 允许线段之间的最大间隙,以便将(在同一条直线上的)线段视为同一条。
最好的是,它直接返回直线的两个端点。在前面的例子中,你只得到直线的参数,你必须找到所有的点。而这个方法,一切都是那么的直接和简单。
两种方法的比较
| 特性 | cv.HoughLines() |
cv.HoughLinesP() |
|---|---|---|
| 返回值 | (ρ, θ) 参数 | 线段端点 (x1,y1,x2,y2) |
| 输出类型 | 无限长直线 | 有限长线段 |
| 速度 | 较慢 | 较快 |
| 内存使用 | 较高 | 较低 |
| 适用场景 | 需要直线参数时 | 大多数实际应用 |
代码如下:
python
import cv2 as cv
import numpy as np
# 读取图像
img = cv.imread(cv.samples.findFile(r'D:\python_code\pic\qipan.jpg'))
original = img.copy()
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
# 边缘检测
edges = cv.Canny(gray, 50, 150, apertureSize=3)
# 概率霍夫线变换
lines = cv.HoughLinesP(edges, 1, np.pi/180, 100,
minLineLength=50, maxLineGap=10)
# 绘制检测到的线段
if lines is not None:
for line in lines:
x1, y1, x2, y2 = line[0]
cv.line(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
print(f"检测到 {len(lines)} 条线段")
# 并排显示原图和结果
result = np.hstack([original, img])
# 缩小显示
height, width = result.shape[:2]
scale = 0.5 # 缩小到50%
new_width = int(width * scale)
new_height = int(height * scale)
small_result = cv.resize(result, (new_width, new_height))
# 显示
cv.imshow('Original vs Result', small_result)
cv.waitKey(0)
cv.destroyAllWindows()
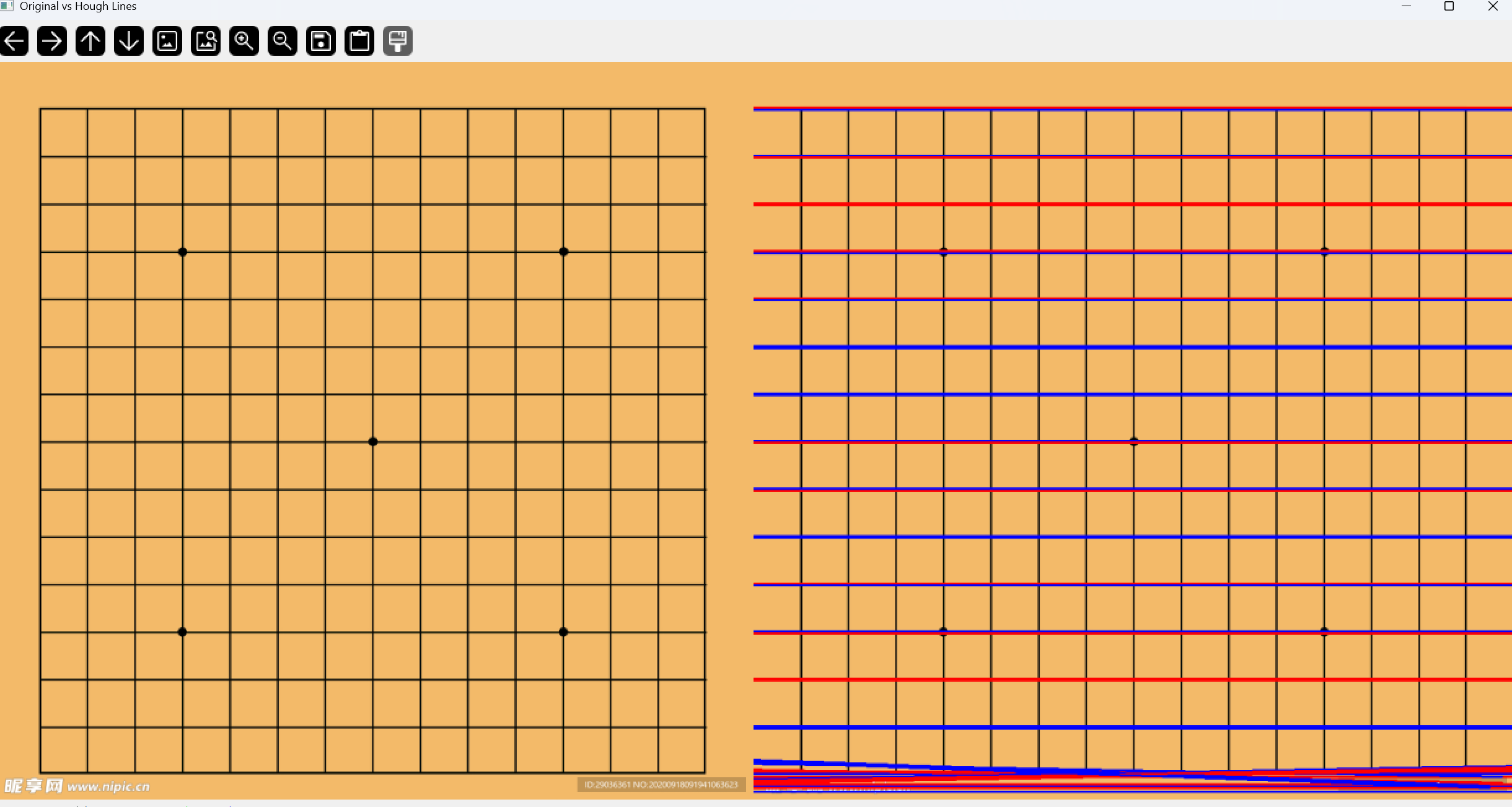
效果如下:

二霍夫圆变换
理论
圆圈在数学上表示为 其中
其中 是圆的中心, 是圆的半径。从这个公式来看,得知我们有三个参数,这样我们就需要一个三维度的累加器来做霍夫变换了,这样效率是非常低的。所以 OpenCV 用了更巧妙的方法Hough Gradient Method ,它利用了边缘的梯度信息。 我们在这里使用的函数是 cv.HoughCircles() 。它的参数非常的多,这些参数在文档中都有详细的解释。所以我们直接上代码吧。
是圆的中心, 是圆的半径。从这个公式来看,得知我们有三个参数,这样我们就需要一个三维度的累加器来做霍夫变换了,这样效率是非常低的。所以 OpenCV 用了更巧妙的方法Hough Gradient Method ,它利用了边缘的梯度信息。 我们在这里使用的函数是 cv.HoughCircles() 。它的参数非常的多,这些参数在文档中都有详细的解释。所以我们直接上代码吧。
python
import numpy as np
import cv2 as cv
# 读取图像并转换为灰度图
img = cv.imread(r'D:\python_code\pic\opencv.jpg', 0)
# 应用中值滤波去除噪声
img = cv.medianBlur(img, 5)
# 将灰度图转换为彩色图以便绘制彩色圆形
cimg = cv.cvtColor(img, cv.COLOR_GRAY2BGR)
# 使用霍夫变换检测圆形
circles = cv.HoughCircles(img, cv.HOUGH_GRADIENT, 1, 20,
param1=50, param2=30, minRadius=0, maxRadius=0)
# 确保检测到圆形
if circles is not None:
circles = np.uint16(np.around(circles))
for i in circles[0, :]:
# 绘制圆形
cv.circle(cimg, (i[0], i[1]), i[2], (0, 255, 0), 2)
# 绘制圆心
cv.circle(cimg, (i[0], i[1]), 2, (0, 0, 255), 3)
# 显示结果
cv.imshow('detected circles', cimg)
cv.waitKey(0)
cv.destroyAllWindows()
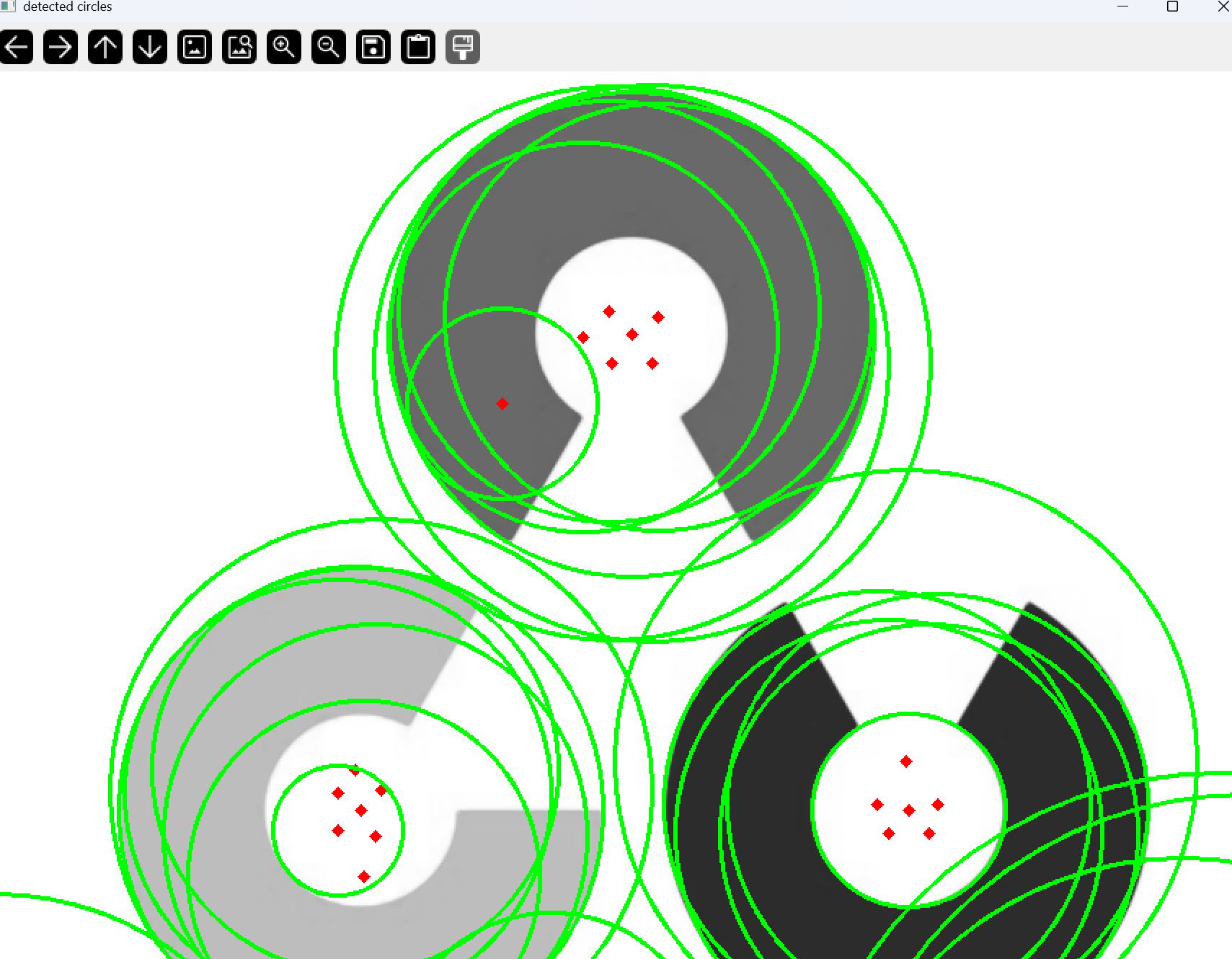
效果如下
三最后一语
今天的内容还是比较有意思的,大家都可以试一试。
我关心我自己。越孤独,越无依无靠,越没有人来帮助我,我就越要自重。
------夏洛蒂·勃朗特《简·爱》
感谢观看,共勉!!