激光雷达点云拟合中的ICP(迭代最近点)算法 ,是用于将两个不同视角下的点云数据精确对齐(配准) 的核心算法。其核心思想是通过迭代,不断寻找两个点云之间最近的点对,并计算最优的刚性变换(旋转 + 平移),最终使它们重合。
ICP 算法核心步骤
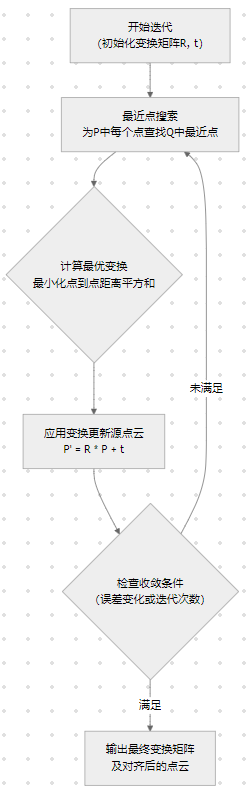
给定源点云 P 和目标点云 Q ,经典的 点到点 ICP 算法流程如下:
步骤详解:
- 最近点搜索 :对源点云 P 中的每一个点,在目标点云 Q 中寻找欧氏距离最近的点,建立点对对应关系。
- 计算最优变换 :基于当前匹配的点对,求解一个刚性变换 (旋转矩阵 R 和平移向量 t ),使得所有对应点对之间的距离平方和最小 。这通常通过 SVD(奇异值分解) 或 四元数法 求解。
- 应用变换 :使用计算得到的 R 和 t 对源点云 P 进行变换,得到新的源点云 P' = R * P + t。
- 判断收敛 :计算变换后点云与目标点云的均方误差。若误差小于设定阈值,或两次迭代间的误差变化很小,或达到最大迭代次数,则停止迭代;否则,返回步骤1继续。
MATLAB 实现与代码
MATLAB 提供了强大的点云处理工具箱,实现 ICP 主要有两种方式:
方法一:使用内置函数 pcregistericp (最便捷)
matlab
% 读取或生成源点云和目标点云(示例)
% ptCloudSource = pcread('source.ply');
% ptCloudTarget = pcread('target.ply');
% 创建示例点云(一个简单的平面点云,并施加一个变换)
target = pointCloud([rand(1000,2), zeros(1000,1)]); % 目标:XY平面点云
source = pointCloud([rand(1000,2), zeros(1000,1)]); % 源:另一个XY平面点云
% 人为给源点云施加一个变换,模拟不同视角
angle = pi/8; % 旋转45度
R = [cos(angle) -sin(angle) 0; sin(angle) cos(angle) 0; 0 0 1];
t = [0.5, 0.2, 0];
sourceTransformed = pctransform(source, rigid3d(R, t));
% 执行ICP配准
[tform, movingReg, rmse] = pcregistericp(sourceTransformed, target, ...
'Metric', 'pointToPoint', ... % 使用'pointToPlane'通常更快更鲁棒
'MaxIterations', 100, ...
'Tolerance', [0.01, 0.001]); % 绝对误差容限和相对误差容限
% 显示结果
disp('变换矩阵:');
disp(tform.T); % 4x4齐次变换矩阵
disp(['均方根误差(RMSE): ', num2str(rmse)]);
% 可视化
pcshowpair(movingReg, target, 'VerticalAxis', 'Y', 'VerticalAxisDir', 'Down')
title('ICP配准结果');
xlabel('X'); ylabel('Y'); zlabel('Z');方法二:手动实现核心的SVD求解 (理解原理)
matlab
function [R, t, transformedP] = myPointToPointICP(P, Q, maxIter, tolerance)
% 简化的手动ICP实现(点到点)
% 输入: P-源点云(Nx3), Q-目标点云(Mx3)
% 输出: R-旋转矩阵(3x3), t-平移向量(1x3), transformedP-变换后的P
R = eye(3);
t = zeros(1, 3);
prevError = inf;
for iter = 1:maxIter
% 1. 最近邻搜索(这里用简单循环示意,实际应用应使用KD树加速)
indices = knnsearch(Q, P * R' + t); % 使用MATLAB的knnsearch
Q_matched = Q(indices, :);
% 2. 去中心化
centroid_P = mean(P, 1);
centroid_Q = mean(Q_matched, 1);
P_centered = P - centroid_P;
Q_centered = Q_matched - centroid_Q;
% 3. 使用SVD计算最优旋转
H = P_centered' * Q_centered; % 3x3协方差矩阵
[U, ~, V] = svd(H);
R_new = V * U';
% 确保是右手系的旋转(防止镜像)
if det(R_new) < 0
V(:,3) = -V(:,3);
R_new = V * U';
end
% 4. 计算平移
t_new = centroid_Q' - R_new * centroid_P';
% 5. 应用变换并更新
R = R_new * R;
t = (R_new * t' + t_new)';
% 6. 计算误差
transformedP = P * R' + t;
currError = mean(sqrt(sum((transformedP - Q_matched).^2, 2)));
% 7. 检查收敛
if abs(prevError - currError) < tolerance
fprintf('在 %d 次迭代后收敛。\n', iter);
break;
end
prevError = currError;
end
fprintf('最终误差: %f\n', prevError);
endICP 变体算法对比
根据匹配准则和优化目标的不同,ICP有多种改进变体,下表列出了常见的几种:
| 变体名称 | 匹配准则/优化目标 | 优点 | 缺点/适用场景 |
|---|---|---|---|
| Point-to-Point | 最小化点到点距离平方和 | 原理简单,直观,MATLAB内置支持 | 对初始位置敏感,收敛慢,易陷入局部最优 |
| Point-to-Plane | 最小化源点到目标点切平面的距离 | 收敛更快,收敛域更大,更常用 | 需要目标点云的法向量,对法向估计敏感 |
| Plane-to-Plane | 最小化局部平面之间的距离 | 精度可能更高,对噪声鲁棒性更好 | 计算复杂,需要估计两片点云的法向和曲率 |
| 颜色/特征信息辅助 | 结合点颜色、法向、FPFH等特征进行匹配 | 在特征丰富场景下匹配更准确 | 对特征提取质量依赖高,计算量增大 |
在MATLAB中调用Point-to-Plane ICP:
matlab
% 首先需要计算目标点云的法向量
target = pcdownsample(target, 'gridAverage', 0.01); % 可先下采样
normals = pcnormals(target); % 计算法向量
target.Normal = normals;
% 然后使用'pointToPlane'度量
[tform, movingReg] = pcregistericp(source, target, 'Metric', 'pointToPlane');参考代码 激光雷达点云数据拟合点云拟合icp算法 www.youwenfan.com/contentcsn/83727.html
总结来说,对于激光雷达点云,Point-to-Plane ICP 通常是更优选择。在MATLAB中,优先使用内置的pcregistericp函数,它经过高度优化并支持多种变体。理解其原理有助于你根据具体的点云特征(稀疏度、噪声水平、重叠区域大小)调整参数,获得稳健的配准结果。