在计算机视觉领域,目标检测技术长期面临一个核心瓶颈:模型只能识别训练过的固定类别。传统检测模型如 YOLO、Faster R-CNN 等,在训练时依赖预定义的标签体系(如 COCO 数据集的 80 类物体),面对未见过的类别时往往束手无策。这种 "封闭世界" 的局限性,使得模型难以适应真实场景中千变万化的物体类型 ------ 从 "咖啡杯" 到 "复古唱片机",从 "流浪猫" 到 "无人机",现实世界的物体类别几乎是无限的。
随着 AIGC 技术的爆发,人们对视觉模型的期待已不止于 "识别已知",更追求 "理解未知"。例如:设计师需要工具自动识别图像中 "带有褶皱的红色窗帘",考古学家希望快速定位照片里 "残缺的陶片",普通人可能想让 AI 圈出视频中 "正在摇尾巴的小狗"。这些需求都指向同一个目标:让计算机像人类一样,通过自然语言描述就能理解并定位任意物体。
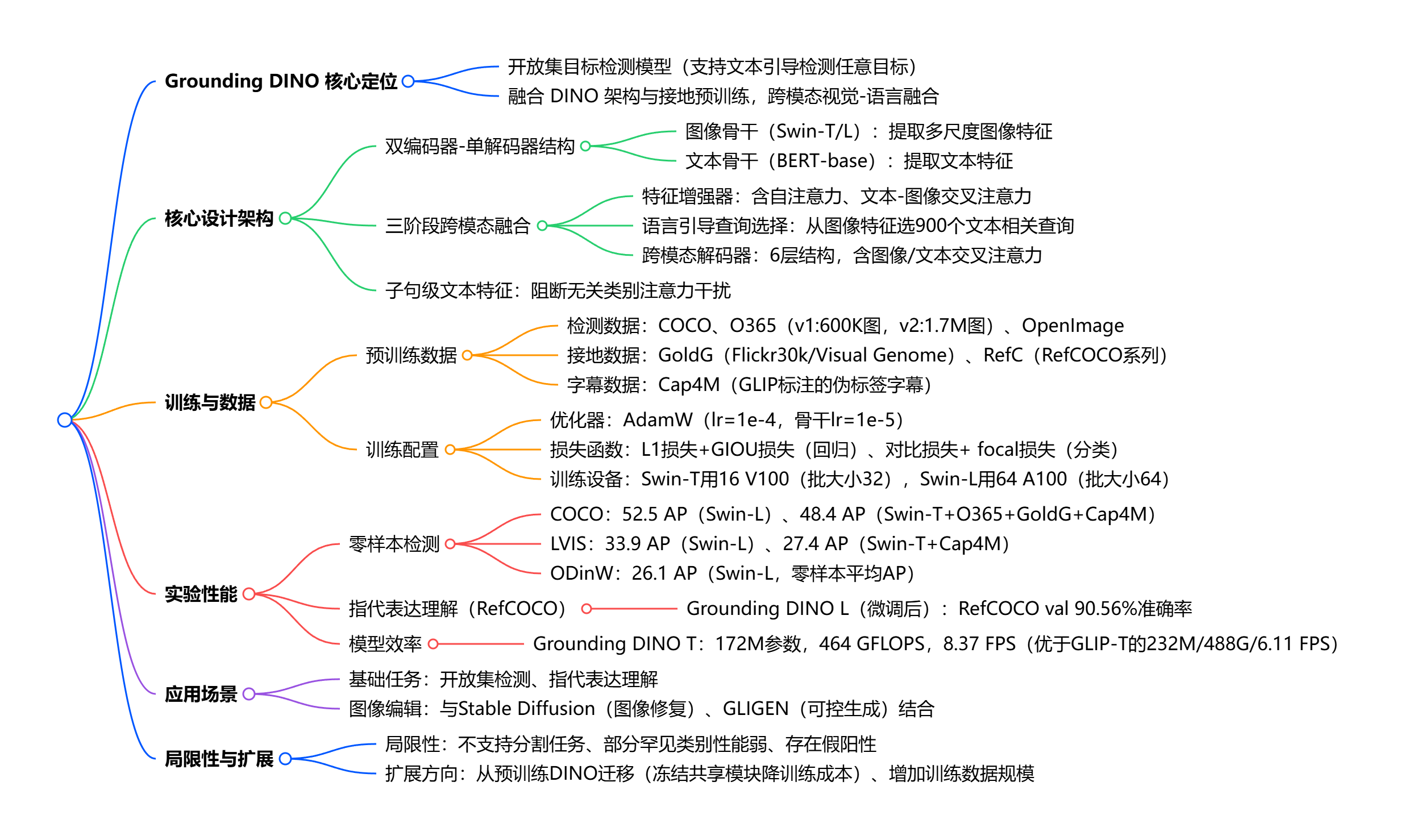
Grounding DINO 的出现,正是为了解决这一 "开放世界目标检测" 难题。它创新性地将 Transformer 架构与语言 - 图像跨模态理解结合,首次实现了 "用自然语言指挥目标检测" 的能力,彻底打破了传统模型对预定义类别的依赖。
技术核心
GroudingDINO的核心作用是通过自然语言提示(Text Prompt)直接检测图像中任意类别的物体,无需针对新类别重新训练。这种能力的关键在于模型的预训练方式:它在大规模图文对数据上学习 "语言概念" 与 "视觉特征" 的关联,从而具备了理解任意文本描述并映射到图像区域的能力。
模块部分:
- 文本 backbone:采用 BERT 等预训练语言模型,将输入的文本提示转换为语义向量;
- 图像 backbone:使用 Swin Transformer 提取图像的视觉特征;
- 特征增强器:融合文本与图像特征,强化跨模态关联;
- 语言引导查询选择:基于文本语义生成 "查询向量",精准定位图像中相关区域;
- 跨模态解码器:通过 Transformer 解码器,输出与文本对应的目标框和置信度。
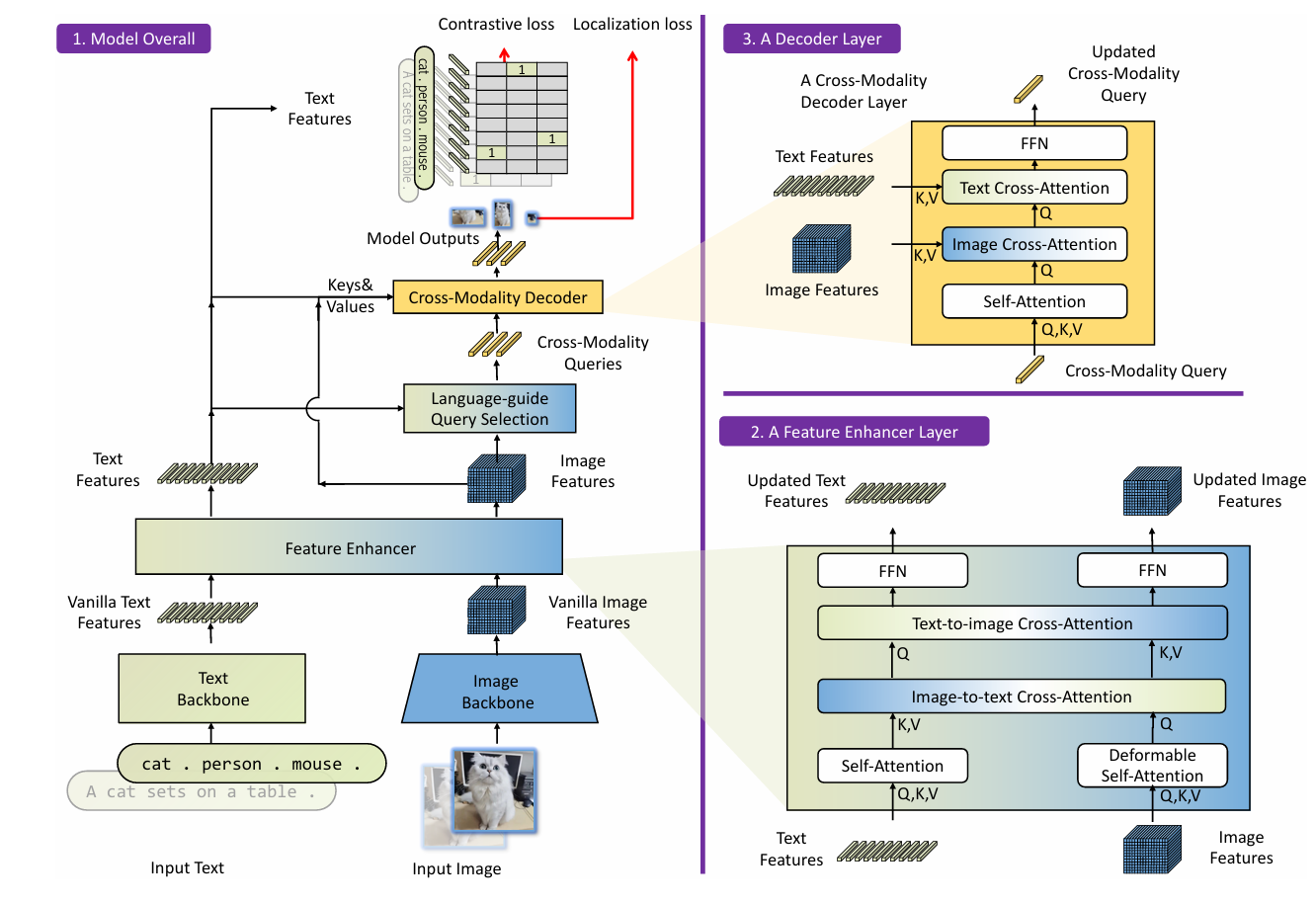
Grounding DINO是一个双encoder单decoder结构,它包含了一个image backbone 用于提取image feature、一个text backbone 用于提取text feature、一个feature enhancer 用于融合image和text feature、一个language-guide query selection 模块用于query初始化、一个cross-modality decoder用于bbox预测。
Grounding DINO 的开放集特性使其在多个领域具备变革性价值:
1、自动为图像生成任意类别的边界框标注(支持导出 COCO 格式),将数据标注效率提升 10 倍以上
2、可通过文本指令让 AI 自动定位并编辑图像元素
3、对提供 Gradio 网页界面(demo/gradio_app.py),可通过上传图像和输入文本提示,实时查看目标检测结果
下面来学习如何使用GroudingDINO。
1、搭建环境
首先克隆 Grounding DINO 仓库到本地:
git clone https://github.com/IDEA-Research/GroundingDINO.git
cd GroundingDINO/
pip install -e .
2、下载权重:
mkdir weights
cd weights
cd ..
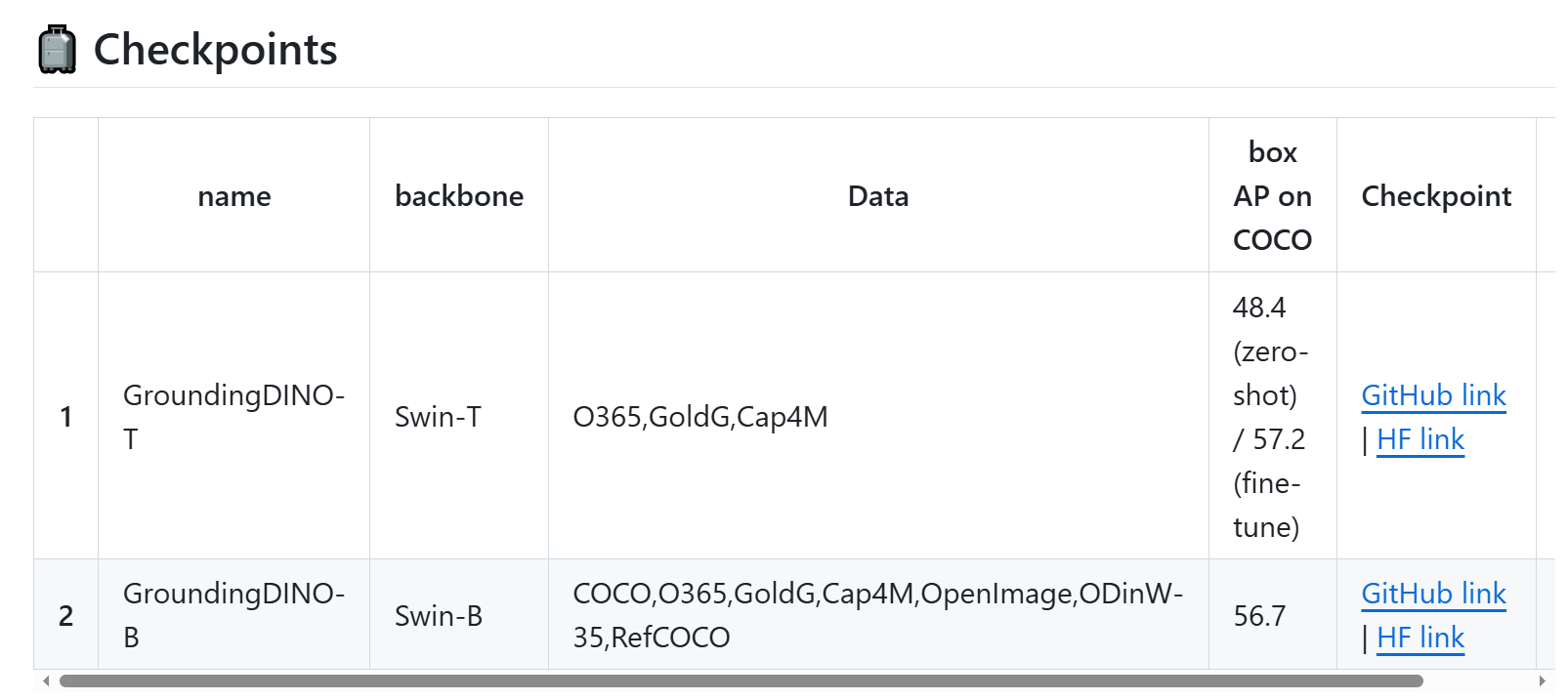
这两个都可以选,上面的代码选的是T版本
还有几个权重需要自行下载(在huggingface)
1、bert-base-uncased:https://huggingface.co/bert-base-uncased
2、Swin-Tiny Transformer视觉骨干网络:https://huggingface.co/microsoft/swin-tiny-patch4-window7-224
3、stable-diffusion-2-inpainting用于图像修复:
python
from atomgit_hub import snapshot_download
snapshot_download("hf_mirrors/ai-gitcode/stable-diffusion-2-inpainting", local_dir = './stable-diffusion-2-inpainting')3、然后,就可以运行Demo
1、使用 demo/inference_on_a_image.py 对单张图像进行目标检测:
准备一张测试图像:
python
python demo/inference_on_a_image.py \
--config_file ./groundingdino/config/GroundingDINO_SwinT_OGC.py \
--checkpoint_path ./weights/groundingdino_swint_ogc.pth \
--image_path ./demo/.asset/test.jpg \
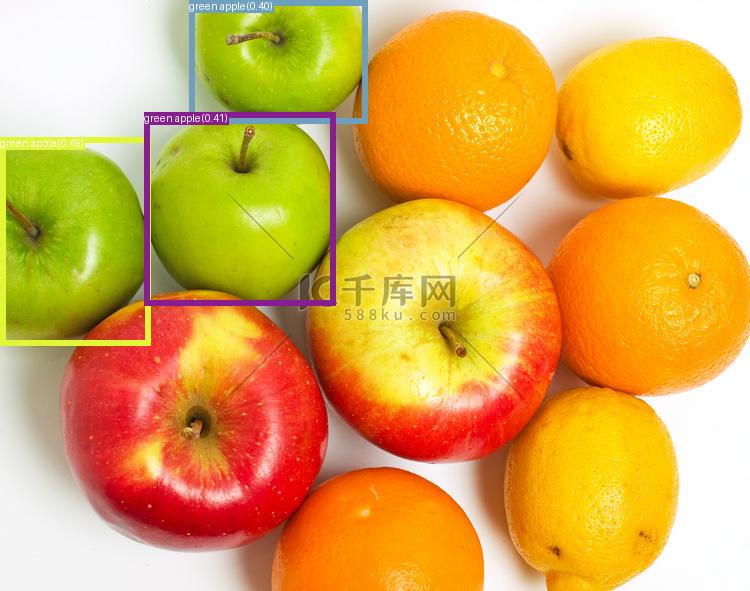
--text_prompt "green apple." \
--output_dir ./outputs \
--box_threshold 0.3 \
--text_threshold 0.25iamge_path换成图像路径,text_prompt用来描述需要检测的目标。
结果:
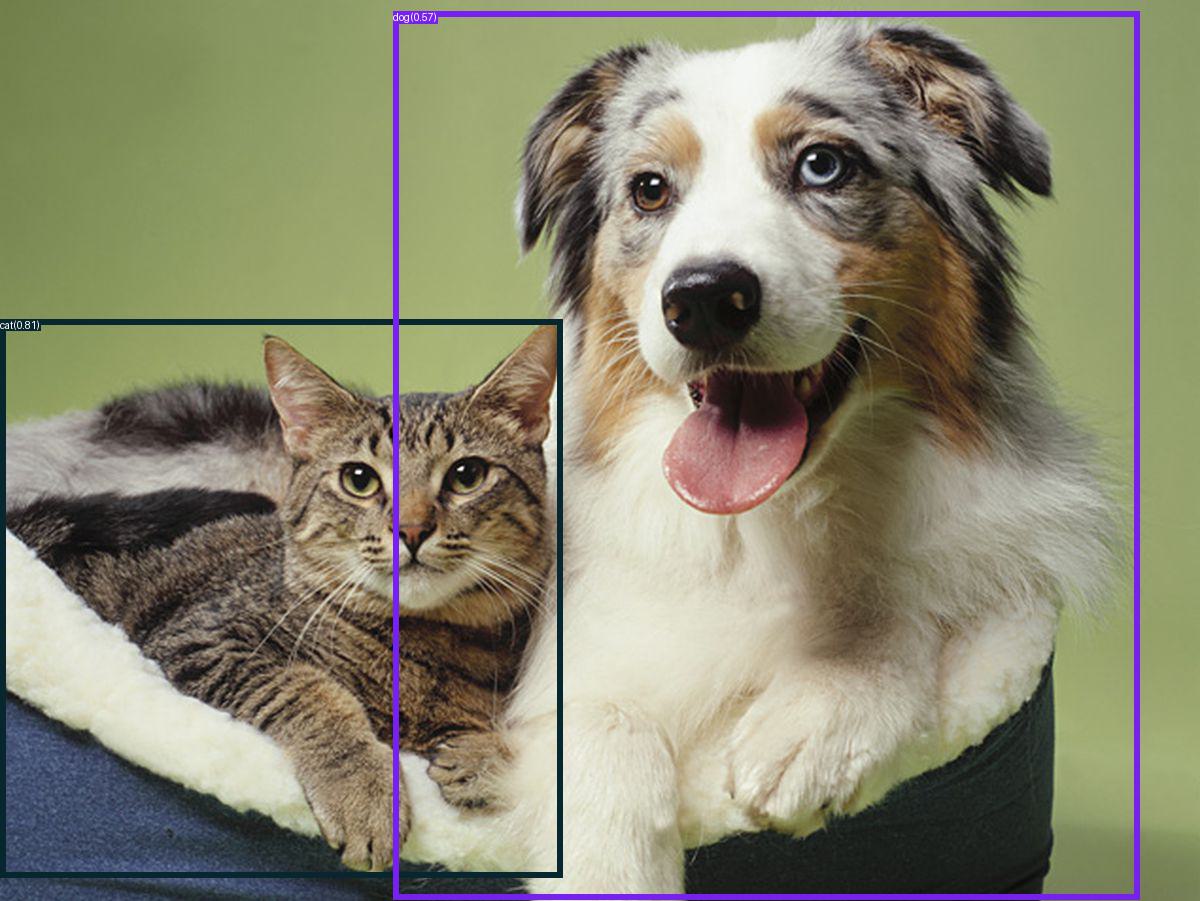
同样的,可以进行多目标检测,输入:

python
python demo/inference_on_a_image.py \
--config_file ./groundingdino/config/GroundingDINO_SwinT_OGC.py \
--checkpoint_path ./weights/groundingdino_swint_ogc.pth \
--image_path ./demo/.asset/cat_dog.jpeg \
--text_prompt "cat. dog." \
--output_dir ./outputs \
--box_threshold 0.3 \
--text_threshold 0.25结果:
2、图像编辑
这里用到下载的stable-diffusion-2-inpainting模型。我编写了一个脚本来快速实现。
python
import os
import cv2
import numpy as np
from PIL import Image
import torch
from torchvision.ops import box_convert
# 设置CUDA可见设备
os.environ["CUDA_VISIBLE_DEVICES"] = "0"
# 导入GroundingDINO相关模块
from groundingdino.models import build_model
from groundingdino.util.slconfig import SLConfig
from groundingdino.util.utils import clean_state_dict
from groundingdino.util.inference import load_image, predict
# 导入Stable Diffusion Inpainting相关模块
from diffusers import StableDiffusionInpaintPipeline
# 1. 加载GroundingDINO模型
def load_groundingdino_model():
# 使用本地的GroundingDINO模型配置和权重路径
local_config_path = "/home/star-jiyang/GroundingDINO/groundingdino/config/GroundingDINO_SwinT_OGC.py"
local_weight_path = "/home/star-jiyang/GroundingDINO/weights/groundingdino_swint_ogc.pth"
# 从本地配置文件构建模型
args = SLConfig.fromfile(local_config_path)
model = build_model(args)
args.device = "cuda"
# 加载本地模型权重
checkpoint = torch.load(local_weight_path, map_location='cpu')
log = model.load_state_dict(clean_state_dict(checkpoint['model']), strict=False)
print("GroundingDINO模型加载完成 => {}".format(log))
model.eval()
return model.to("cuda")
# 2. 加载本地Stable Diffusion 2 Inpainting模型
def load_stable_diffusion_inpainting_model():
# 使用本地下载的模型
model_path = "/home/star-jiyang/GroundingDINO/stable-diffusion-2-inpainting"
pipe = StableDiffusionInpaintPipeline.from_pretrained(
model_path,
torch_dtype=torch.float16,
safety_checker=None, # 禁用安全检查器以提高速度
)
pipe = pipe.to("cuda")
print("Stable Diffusion 2 Inpainting模型加载完成")
return pipe
# 3. 图像编辑函数
def edit_image(image_path, text_prompt, box_threshold=0.45, text_threshold=0.25, inpaint_prompt=""):
# 加载图像
image_source, image = load_image(image_path)
# 使用GroundingDINO检测目标
boxes, logits, phrases = predict(
model=groundingdino_model,
image=image,
caption=text_prompt,
box_threshold=box_threshold,
text_threshold=text_threshold
)
if len(boxes) == 0:
print("未检测到目标")
return None
print(f"检测到 {len(boxes)} 个目标: {phrases}")
# 选择置信度最高的目标
best_box_idx = logits.argmax().item()
best_box = boxes[best_box_idx]
best_phrase = phrases[best_box_idx]
print(f"选择置信度最高的目标: {best_phrase}, 置信度: {logits[best_box_idx].item():.2f}")
# 转换边界框格式 (cxcywh -> xywh)
h, w, _ = image_source.shape
boxes_xywh = box_convert(boxes=boxes, in_fmt="cxcywh", out_fmt="xywh")
boxes_xywh = boxes_xywh * torch.Tensor([w, h, w, h])
box = boxes_xywh[best_box_idx].numpy()
# 创建掩码
mask = np.zeros((h, w), dtype=np.uint8)
x, y, box_w, box_h = box
x, y = int(x), int(y)
box_w, box_h = int(box_w), int(box_h)
mask[y:y+box_h, x:x+box_w] = 255
# 转换为PIL图像
image_pil = Image.fromarray(image_source)
mask_pil = Image.fromarray(mask)
# 调整图像大小以适应Stable Diffusion (512x512)
image_pil = image_pil.resize((512, 512))
mask_pil = mask_pil.resize((512, 512))
# 使用Stable Diffusion进行图像修复
if not inpaint_prompt:
inpaint_prompt = f"a {best_phrase}"
print(f"使用提示词进行图像修复: {inpaint_prompt}")
edited_image = stable_diffusion_pipe(
prompt=inpaint_prompt,
image=image_pil,
mask_image=mask_pil,
width=512,
height=512,
guidance_scale=7.5,
num_inference_steps=50,
).images[0]
return image_source, mask, edited_image, best_phrase
# 4. 主函数
if __name__ == "__main__":
# 加载模型
print("正在加载GroundingDINO模型...")
groundingdino_model = load_groundingdino_model()
print("\n正在加载Stable Diffusion 2 Inpainting模型...")
stable_diffusion_pipe = load_stable_diffusion_inpainting_model()
# 使用本地的示例图像
local_image_path = "GroundingDINO/test_images/cat.jpg"
if not os.path.exists(local_image_path):
print(f"错误:本地图像文件不存在: {local_image_path}")
exit(1)
else:
print(f"使用本地示例图像: {local_image_path}")
# 定义编辑任务
text_prompt = "the black cat"
inpaint_prompt = "a cute white dog sitting on the grass"
print(f"\n开始图像编辑任务:")
print(f"- 检测提示词: {text_prompt}")
print(f"- 修复提示词: {inpaint_prompt}")
# 执行图像编辑
original_image, mask, edited_image, detected_object = edit_image(
local_image_path,
text_prompt,
box_threshold=0.45,
text_threshold=0.25,
inpaint_prompt=inpaint_prompt
)
if edited_image is not None:
# 保存结果
edited_image.save("edited_image.png")
# 保存带有掩码的原始图像
mask_visual = cv2.cvtColor(mask, cv2.COLOR_GRAY2BGR)
mask_visual = cv2.resize(mask_visual, (original_image.shape[1], original_image.shape[0]))
masked_image = cv2.addWeighted(original_image, 0.7, mask_visual, 0.3, 0)
cv2.imwrite("masked_image.png", masked_image)
print("\n图像编辑完成!")
print(f"- 原始图像: {local_image_path}")
print(f"- 带有掩码的图像: masked_image.png")
print(f"- 编辑后的图像: edited_image.png")
else:
print("图像编辑失败")输入:

根据提示词可以看到我想要将黑色的猫换成一条白色的狗,输出:

3、GroundingDINO还可以进行批量的自动化目标检测标注,大家可以使用create_coco_dataset.py进行尝试。这里不作演示。
GroundingDINO还可以与 Segment Anything(SAM)配合:对检测到的物体进行像素级分割,实现 "检测 + 分割" 一体化。总之,Grounding DINO 的出现,标志着目标检测从 "封闭类别" 迈向 "开放世界" 的重要突破。它不再局限于识别预设的物体类型,而是通过语言作为桥梁。
以上为全部内容!