引言
你是否也曾为智能车在弯道突然"失明"而功亏一篑?
传统摄像头产生的运动拖影,让赛道边缘倾斜,让原本清晰的引导线变成了"鬼影",导致智能车在高速运行时判断失误,错失良机。这可能并不是你算法的瓶颈而是视觉图像采集的"源头"出了问题!
去年极速光电组龙芯赛题的验证中,我们根据赛题和龙芯主板特性选用了一款灰度高帧率全局快门USB摄像头,该USB摄像头不用图像剪裁,无拖影,整体上限更高!而今年的龙芯赛题在原来只需要识别赛道元素的基础上又增加了新的识别任务,这无疑更考验摄像头的识别速度及效果。
以下是21届智能车竞赛规则的相关介绍,不过规则还在完善中,请及时关注卓大的微信公众号及CSDN(建议每天都看看)。
第二十一届全国大学生智能汽车竞赛比赛规则_21届智能车规则-CSDN
https://zhuoqing.blog.csdn.net/article/details/154598625

灵眼LQUGSCV1彩色USB摄像头
对于21届赛题而言,仅仅识别赛道边界已经不够。道路上的碑文图像需要YOLO等目标检测算法来处理元素,而这一切的前提,是摄像头必须提供高质量的图像源。
为了更加适配今年的赛题任务,提升视觉识别的精准度。龙邱专为竞速视觉打造的全新USB摄像头------「灵眼」 重磅来袭!(已上架龙邱科技官方淘宝店铺)

它搭载彩色全局快门,并带来120FPS超高帧率,确保智能车在急速飞驰的瞬间,也能捕捉每一帧清晰的画面。告别模糊,让精准识别将成为你弯道超车的终极武器!
全局快门 终结果冻效应
智能车高速过弯时,普通CMOS(卷帘快门)摄像头采用扫描仪去拍快速移动物体,图像会倾斜、扭曲,产生"果冻效应"。表现在赛道上,就是笔直的引导线在画面中变得弯曲,赛道边缘出现拖影鬼影,导致你的控制算法依据错误图像,做出致命误判。

瞬间定格 精准捕捉
「灵眼」采用全局快门技术,其感光像素点能像相机闪光灯一样,在同一瞬间捕获整个画面的所有光线,而非逐行扫描。这意味着,即使是高速运动的物体,其图像也能被完整、无变形地定格。
目标追踪实测
场地实测验证
低延迟图传:让决策"快人一步"
低延迟图传
清晰成像赋能YOLO识别,让智能车"看得懂"
清晰成像赋能YOLO识别
龙芯赛题 赛道实测
21届智能车竞赛---走马观碑组赛道实测
项目开源分享
灵眼LQUGSCV1使用教程示例
cpp
#include <opencv2/opencv.hpp>
using namespace cv;
int main() {
// 参数0代表默认摄像头,在笔记本上指定灵眼需要使用参数1,在久久派上使用参数0
VideoCapture cap(1);
// 检查摄像头是否成功打开
if (!cap.isOpened()) {
printf("错误:无法打开摄像头!请检查连接是否正确。\n");
return -1;
}
// 设置视频编码格式为MJPEG 分辨率 320x240 帧率 120FPS
cap.set(CAP_PROP_FOURCC, VideoWriter::fourcc('M', 'J', 'P', 'G'));
cap.set(CAP_PROP_FRAME_WIDTH, 320);
cap.set(CAP_PROP_FRAME_HEIGHT, 240);
cap.set(CAP_PROP_FPS, 120);
// 验证设置是否生效
double actualWidth = cap.get(CAP_PROP_FRAME_WIDTH);
double actualHeight = cap.get(CAP_PROP_FRAME_HEIGHT);
double actualFps = cap.get(CAP_PROP_FPS);
printf("摄像头配置信息:\n");
printf("分辨率:%.0fx%.0f\n", actualWidth, actualHeight);
printf("帧率:%.0f FPS\n", actualFps);
// 创建显示窗口 若久久派使用需注释掉
namedWindow("灵眼摄像头 - 实时画面", WINDOW_AUTOSIZE);
Mat frame;
while (true) {
// 从摄像头读取一帧图像
cap >> frame;
if (frame.empty()) {
printf("错误:获取到的图像为空!\n");
break;
}
// 旋转图像180度 若正装请注释
rotate(frame, frame, ROTATE_180);
// 显示图像 若久久派使用需注释掉
imshow("灵眼摄像头 - 实时画面", frame);
// 1 ms 等待,按键 q 退出 若久久派使用需注释掉
if (waitKey(1) == 'q') break;
}
// 释放摄像头资源cap.release();
// 关闭所有OpenCV窗口 若久久派使用需注释掉
destroyAllWindows();
return 0;
} 龙芯久久派开发流程项目开源
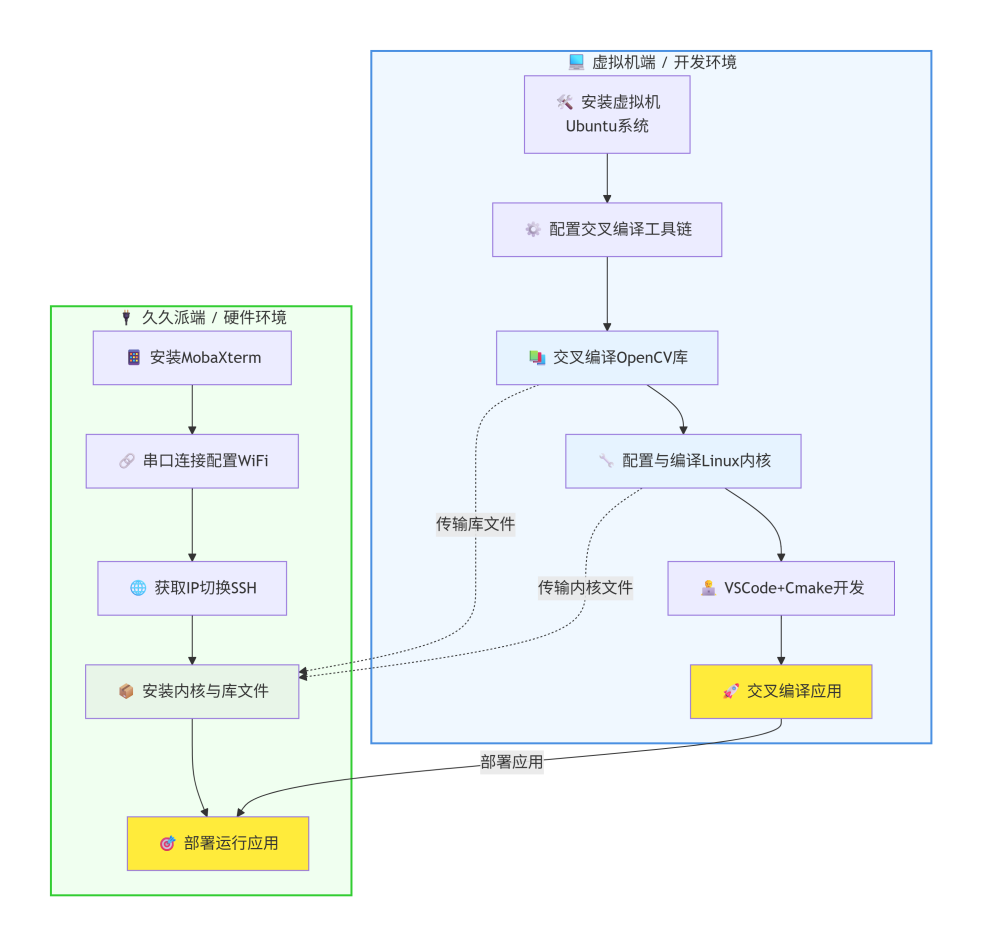
项目开源
龙芯久久派 库新增 板载WiFi UDP图传:https://gitee.com/lq-tech/Loongson_2k300_LIB
虚拟机环境开源:「LQ_ubuntu.7z」,点击链接或复制整段内容,打开「夸克APP」即可获取。
/~4d6d39MpAe~:/
链接:https://pan.quark.cn/s/c6c6e4f72aed
提取码:dctN 密码:1
已经配好环境,到手即用,以下是相关使用及学习教程
【21届智能车竞赛·龙芯虚拟机环境配置教程,到手即用-哔哩哔哩】
龙芯久久派学习教程:攻克龙芯赛道难题的一站式指南-哔哩哔哩视频 https://space.bilibili.com/95313236/lists/4763568?type=season
对于智能车而言,视觉处理的核心挑战在于如何在高动态场景下,确保图像采集的准确性与实时性。
而灵眼LQUGSCV1彩色USB摄像头采用全局快门,无畸变,不拖影,帧率高,它可以通过同时曝光来消除"果冻效应",从根本上保证了运动图像的真实性。
它不仅仅是一个摄像头,更是提升上限、决胜弯道的关键!