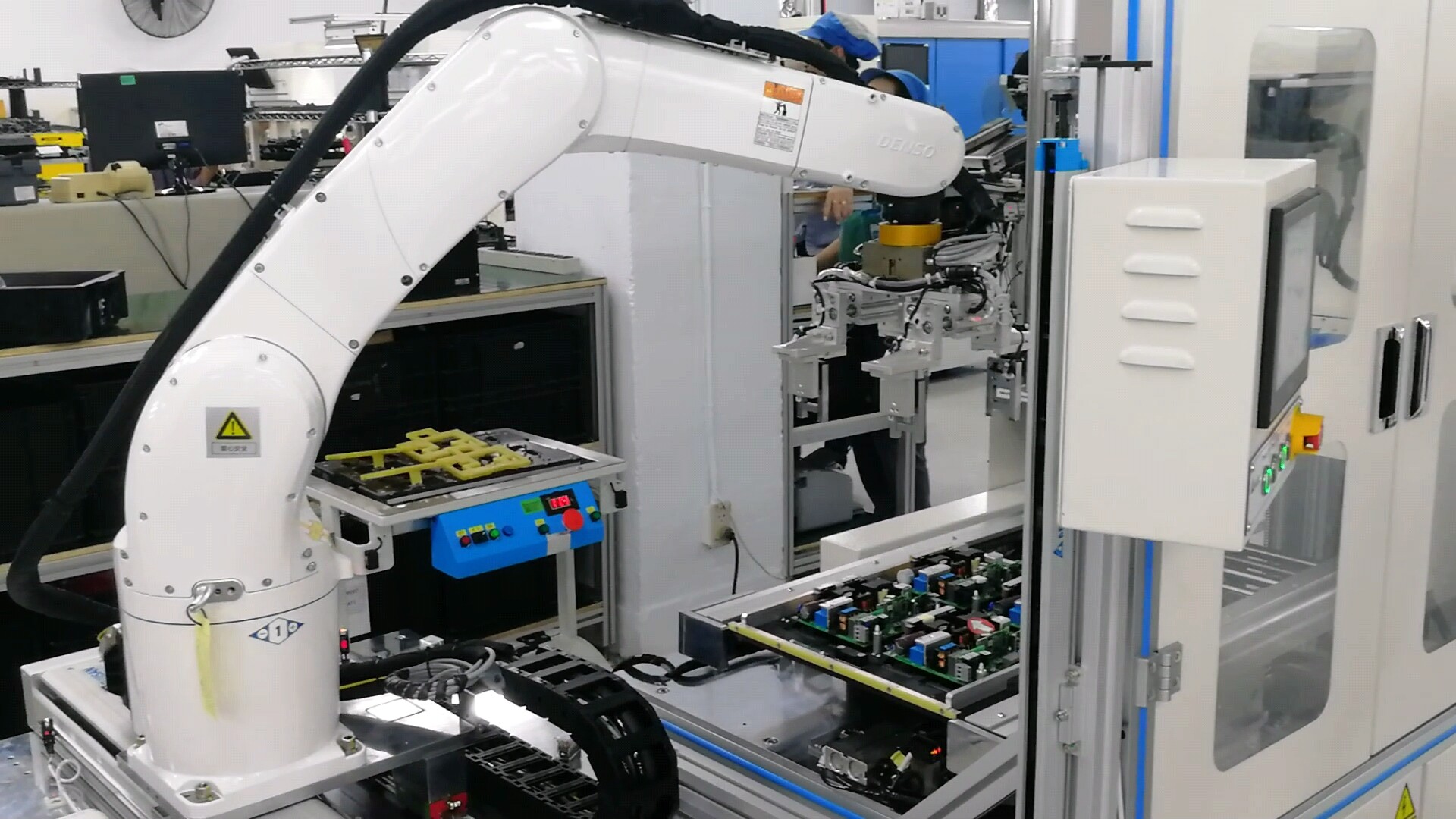
DENSO机器人二次开发 C#读取和写入数据,使用官方SDK库ORIN2 自己写的ABB机器人类,机器人常规操作功能都有,非常适合进行二次开发 整套源代码和denso机器人学习手册,编程软件

最近在搞DENSO机器人的二次开发,发现这个过程还挺有意思的,今天就来跟大家分享一下用C#读取和写入数据,并且使用官方SDK库ORIN2的一些经验。
为啥选择C#和ORIN2 SDK
C#是一种功能强大、易于学习和使用的编程语言,在工业自动化领域有着广泛的应用。而DENSO官方提供的ORIN2 SDK,为我们与DENSO机器人进行交互提供了非常便捷的方式。它封装了很多底层的通信协议和操作,让我们可以更专注于业务逻辑的开发。
准备工作
在开始之前,你得有一套DENSO机器人的开发环境,包括官方的编程软件,以及我们要用到的ORIN2 SDK。另外,我自己写了一个ABB机器人类,这个类里包含了机器人常规操作的功能,非常适合进行二次开发。有需要的话,我可以把整套源代码和DENSO机器人学习手册分享给大家。
代码实现
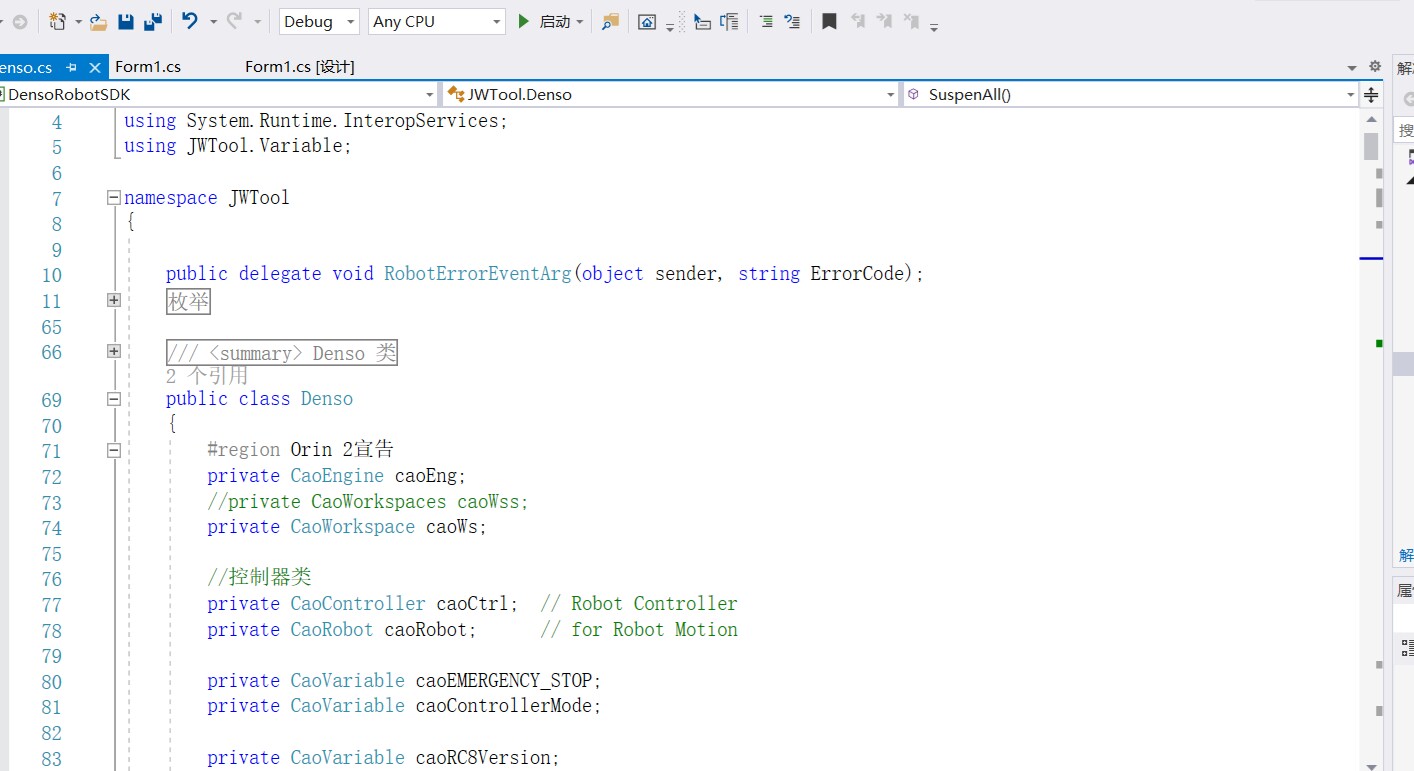
引入SDK库
首先,我们要在C#项目里引入ORIN2 SDK库。假设我们已经把SDK的相关dll文件放在了项目的引用目录下,在代码里这样引用:
csharp
using ORIN2;这行代码就把ORIN2的命名空间引入到我们的项目中了,这样我们就可以使用SDK里的各种类和方法。
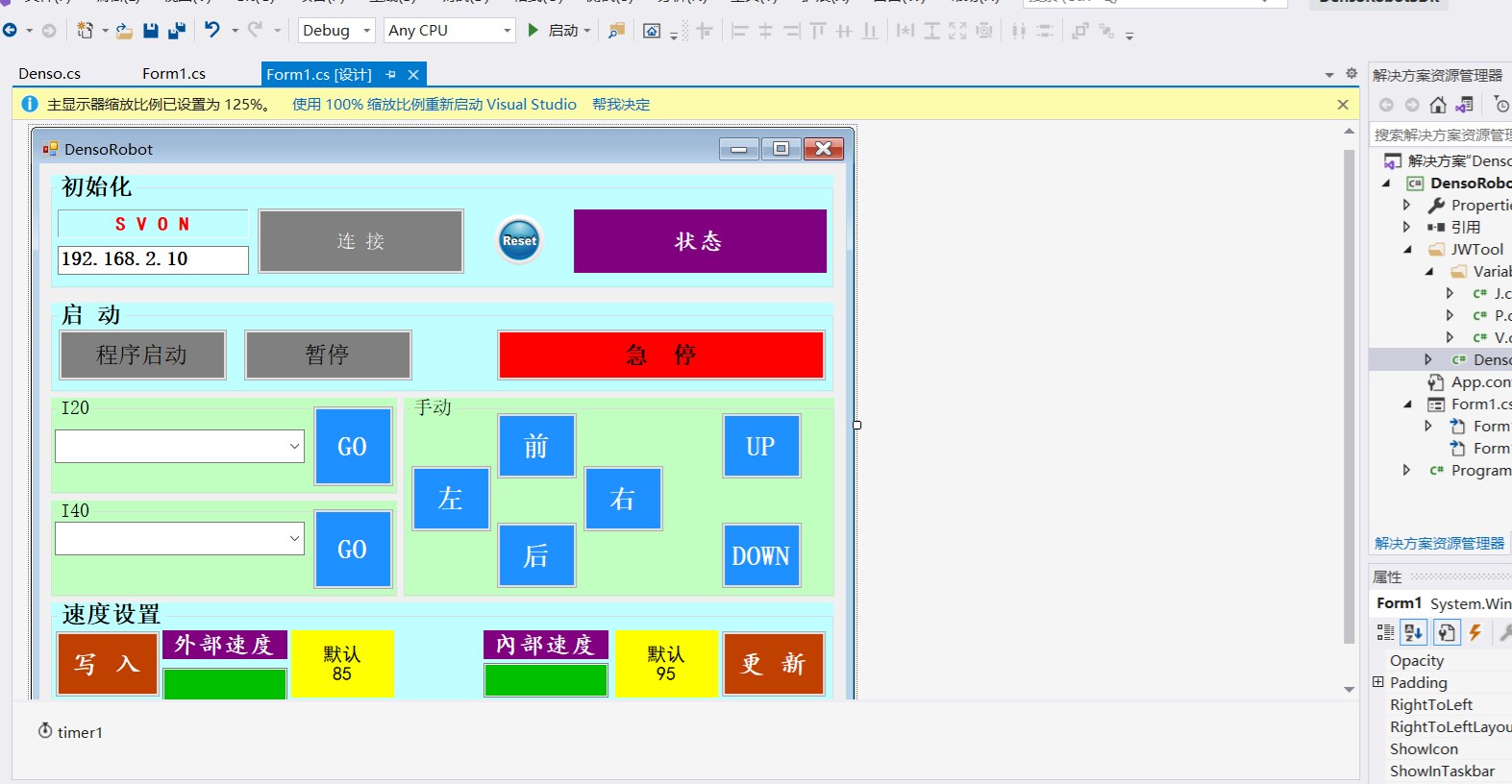
连接机器人
接下来,我们要建立与DENSO机器人的连接。下面是一段简单的代码示例:
csharp
// 创建ORIN2控制器对象
ORIN2Controller controller = new ORIN2Controller();
// 连接到机器人
bool isConnected = controller.Connect("192.168.1.100", 10000);
if (isConnected)
{
Console.WriteLine("成功连接到机器人");
}
else
{
Console.WriteLine("连接失败");
}代码分析:这里我们先创建了一个ORIN2Controller对象,这个对象就代表了我们要连接的机器人控制器。然后调用Connect方法,传入机器人的IP地址和端口号来建立连接。Connect方法会返回一个布尔值,表示连接是否成功。
读取数据
连接成功后,我们就可以读取机器人的数据了。比如读取机器人的当前位置:
csharp
if (isConnected)
{
// 读取机器人当前位置
ORIN2Position position = controller.GetCurrentPosition();
Console.WriteLine($"机器人当前位置:X = {position.X}, Y = {position.Y}, Z = {position.Z}");
}代码分析:GetCurrentPosition方法是ORIN2Controller类里的一个方法,它会返回一个ORIN2Position对象,这个对象包含了机器人当前的X、Y、Z坐标。我们把这些坐标打印出来,就可以知道机器人的当前位置了。
写入数据
除了读取数据,我们还可以向机器人写入数据,比如让机器人移动到指定位置:
csharp
if (isConnected)
{
// 创建一个目标位置
ORIN2Position targetPosition = new ORIN2Position();
targetPosition.X = 100;
targetPosition.Y = 200;
targetPosition.Z = 300;
// 让机器人移动到目标位置
bool moveSuccess = controller.MoveToPosition(targetPosition);
if (moveSuccess)
{
Console.WriteLine("机器人成功移动到目标位置");
}
else
{
Console.WriteLine("机器人移动失败");
}
}代码分析:这里我们先创建了一个ORIN2Position对象,并且设置了目标位置的X、Y、Z坐标。然后调用MoveToPosition方法,传入目标位置对象,让机器人移动到指定位置。MoveToPosition方法会返回一个布尔值,表示移动是否成功。
总结
通过以上的代码示例,我们可以看到使用C#和ORIN2 SDK进行DENSO机器人的二次开发还是比较简单的。我们可以方便地读取和写入机器人的数据,实现各种自动化操作。如果你也对DENSO机器人的二次开发感兴趣,不妨试试我的这套方法。要是在开发过程中遇到什么问题,或者想要整套源代码和DENSO机器人学习手册,都可以在评论区留言。
希望这篇博文能对你有所帮助,咱们下次再见!