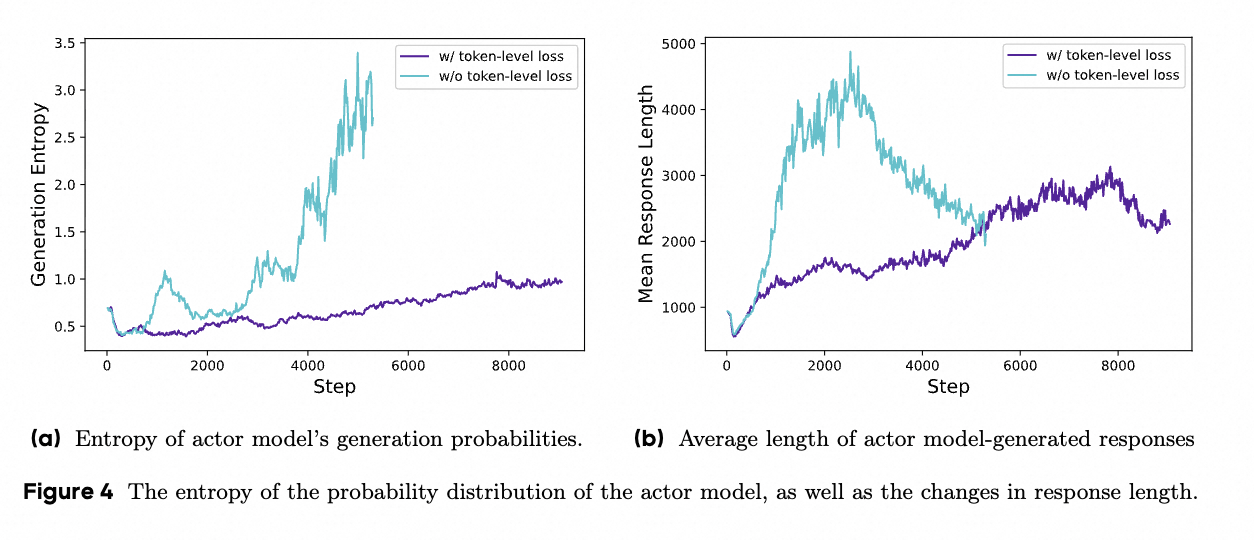
图 4 在论文中用于对比 "有无 token-level policy gradient loss" 时训练过程中两个关键量的演化:生成概率的熵(entropy)和平均响应长度(mean response length)。我先把论文用来描述 token-level loss 的目标式(简化形式)写出,便于后面说明其机制:
Jtoken-level(θ)=E1P∑i=1G∑t=1∣oi∣min (ri,tA\^i,t, clip(ri,t,1−ϵlow,1+ϵhigh)A\^i,t), J_{\text{token-level}}(\theta)=\mathbb{E}\Big\\frac{1}{P}\\sum_{i=1}\^G\\sum_{t=1}\^{\|o_i\|} \\min\\!\\big(r_{i,t}\\hat A_{i,t},\\;\\operatorname{clip}(r_{i,t},1-\\epsilon_{\\text{low}},1+\\epsilon_{\\text{high}})\\hat A_{i,t}\\big)\\Big, Jtoken-level(θ)=EP1i=1∑Gt=1∑∣oi∣min(ri,tA\^i,t,clip(ri,t,1−ϵlow,1+ϵhigh)A\^i,t),
其中 P=∑i∣oi∣P=\sum_i|o_i|P=∑i∣oi∣ 是组内总 token 数,ri,tr_{i,t}ri,t 是重要性比,A^i,t\hat A_{i,t}A^i,t 是组内归一化的奖励优势。
基于这一定义,图 4 的两条子图说明如下要点:
-
子图 (a) --- 生成概率的熵(Entropy):
图中对比了"有 token-level loss(w/ token-level loss)"与"无 token-level loss(w/o token-level loss)"两种训练下 actor 模型生成分布的熵随训练步数的变化。论文指出和图示一致的结论是:
- 在没有 token-level loss(即采用 sample-level 平均损失)的情况下,熵更容易不受控地上升或出现异常(表示模型生成分布变得非常平坦或产生大量低质量、高多样性的输出------如胡言乱语、重复等)。
- 加入 token-level loss 后,熵的增长被抑制/更平稳,模型在保持适度探索的同时避免过度的无序生成。
直观原因:token-level loss 将每个 token 的贡献都显式计入,使得对于产生低质量但超长响应的"坏模式"可以在 token 级别被更精确地惩罚,从而抑制那些会人为提高熵但不提高任务回报的生成模式。
-
子图 (b) --- 平均响应长度(Mean Response Length):
这张子图展示的是两种训练下模型生成的平均 token 长度随训练步数的变化。结论是:
- 无 token-level loss 时,响应长度往往会"非健康地"快速增长(模型通过变长生成来获得某些奖励或逃避惩罚),但这些变长并不一定对应更高质量的推理;长序列里可能充斥重复或无意义片段。
- 使用 token-level loss 后,长度增长更"健康、可控"------即当模型真正学到有效的长链式推理时长度会合理增长,但不会被无意义的延长行为占据。
原因同样是 credit assignment:token-level loss 不把长序列的"平均化"稀释掉每个 token 的惩罚/奖励,因而可以更好地压制长但低质的生成,鼓励真正有价值的长推理。
总结一句话的直觉:样本级(sample-level)先把一条长回复内部的 token 平均,这会稀释对长回复中"坏 token" 的惩罚,从而容忍甚至鼓励生成冗长但低质的序列;而 token-level loss 把每个 token 当作独立贡献单位来评估和优化,所以能更精细地约束生成质量,表现为图 4 中较稳的 entropy 曲线和更健康的长度曲线。
工程与实践提示(由图 4 的含义延伸):
- 实现时要在 token 级别保存并重算每个 token 的 log-prob、mask 掉 padding,再按 PPP 做归一化,代价是计算与内存开销增大。
- 为避免噪声放大,仍需对组内 advantage 做数值保护(如 σ←max(σ,ε)\sigma\leftarrow\max(\sigma,\varepsilon)σ←max(σ,ε))并可对 A^\hat AA^ 做 clipping。
- 可做的后续实验:不同 token 权重方案(均权、按位置信息加权、按置信度加权)、token-level 与 sample-level 的混合损失、以及在 token-level 基础上引入 token-wise value 模型以进一步精细化 credit assignment。
如果你想,我可以:
- 给出把 sample-level 换成 token-level 的具体伪代码(显示如何保存 old log-probs、重算 new log-probs、按 token 累积 surrogate 并归一化);或
- 把图 4 的曲线用示例数据重现,帮助你直观看出两者差异。你想先看哪一个?
好,我来逐条、深入地解释论文中图 5(Figure 5)在说什么、为什么会出现这样的现象、它背后的机制是什么,以及在实现上和后续实验中应该注意/可尝试的事项。会引用论文中的 Overlong Reward Shaping(过长奖励塑造)相关公式并给出实现建议。所有含公式的句子我都用 LaTeX 格式写出。
一、图 5 的组成与直接结论
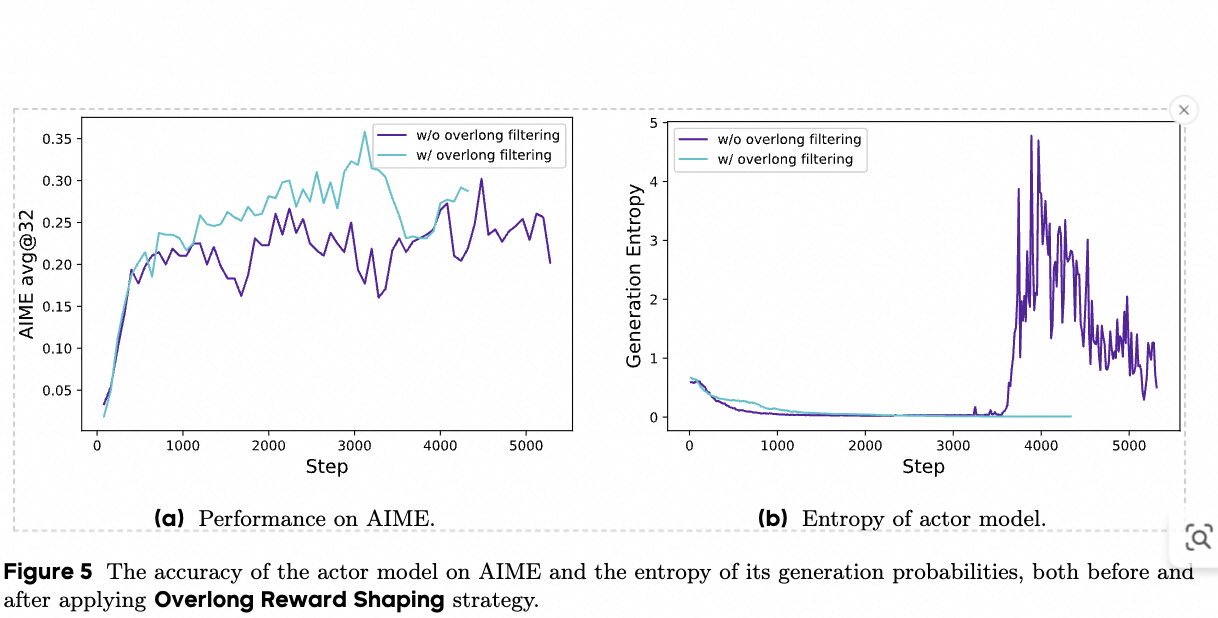
- 图 5(a) 比较了在训练过程中,有无对被截断(overlong)样本进行过滤(Overlong Filtering)时,在 AIME 验证集上的准确率曲线差异。结论是:采用 overlong filtering 能显著稳定训练并提升最终准确率。
- 图 5(b) 比较了相同设置下 actor 模型生成分布的熵(entropy)。结论是:采用 overlong filtering 后,熵更低且曲线更平稳,说明模型生成分布更稳健、不至于变得过度杂乱或无意义。
二、为什么"过长样本的奖励处理"会影响训练(原因与机制)
- 在强化学习训练中,若生成被强制截断(因为超过最大长度 LmaxL_{\max}Lmax),通常会对该样本给出惩罚或低分。这种做法会把"长度造成的截断"与"推理质量"混为一谈:一个本来推理正确但确实较长的样本,会因为被截断而被赋低 reward,从而把正确的推理模式误判为坏模式,给模型提供误导性的负信号。
- 这种误导性信号会产生"reward noise" ------ 即奖励不再能可靠反映推理质量,导致优势估计 A^\hat AA^ 变噪声大或方差增大,进而使梯度震荡、训练不稳或策略学到回避长输出的劣策略(例如生成碎片化或提前停止)。
- 因此图 5 展示的现象本质上是:不合适地惩罚被截断样本,会降低训练质量(表现为验证准确率下降与熵异常);而对截断样本进行过滤或采用平滑惩罚,会减少这种噪声,稳定训练并提高性能。
三、论文中采用的两种处理策略及其直觉(对应图中对比)
- Overlong Filtering(论文用到的第一个策略):把被截断的样本"mask掉",即在计算 policy loss 时不把这些样本纳入损失/优势计算中。实质上这是把"可疑/不可靠"的信号剔除,避免把误导信息用于更新。实现上对应伪代码:在计算 group 的 RiR_iRi 后,若样本 iii 被截断则 skip(或不给 loss)。但需配合 Dynamic Sampling,保证每个训练 batch 仍有足够的有效组。
- Soft Overlong Punishment(论文提出的更温和策略,公式在文中为式 (13)):对超过阈值的长度给予一个"按超长程度线性/分段加重"的惩罚,而不是一刀切地负分或直接屏蔽。论文给出的形式为分段函数(我按论文排版写出):
Rlength(y)={0,∣y∣≤Lmax−Lcache,Lmax−Lcache−∣y∣Lcache,Lmax−Lcache<∣y∣≤Lmax−1,−1,∣y∣>Lmax. R_{\text{length}}(y)= \begin{cases} 0, & |y| \le L_{\max}-L_{\text{cache}},\\4pt \dfrac{L_{\max}-L_{\text{cache}}-|y|}{L_{\text{cache}}}, & L_{\max}-L_{\text{cache}} < |y| \le L_{\max}-1,\\6pt -1, & |y| > L_{\max}. \end{cases} Rlength(y)=⎩ ⎨ ⎧0,LcacheLmax−Lcache−∣y∣,−1,∣y∣≤Lmax−Lcache,Lmax−Lcache<∣y∣≤Lmax−1,∣y∣>Lmax.
(注:上面是论文给出的大意分段表达,实际实现可按论文细节调整) - 直觉:在 ∣y∣|y|∣y∣ 接近但未超过 LmaxL_{\max}Lmax 的区间,用一个逐渐增强的软惩罚告诉模型"你快要超限了,尽量短一点";真正超过上限被截断时才给较重惩罚。这样能兼顾不鼓励无意义的无限拉长,又不把本来正确但微微超长的推理直接判为错误。
四、图 5 中性能与熵变化的解释(把现象和机制连起来)
- 精确信号减少噪声:Overlong Filtering 把那些因截断产生的"伪负样本"剔除,降低了组内 reward 的随机性,组内归一化(A^\hat AA^)因此更可靠,策略更新更稳定------这直接反映在 AIME 准确率的提升上(图 5(a))。
- 熵的变化:当过滤掉被截断的"有问题"样本后,模型不再被误导去尝试极端多样/无意义的生成以规避长度惩罚,生成分布的熵因此更合理(图 5(b) 显示熵下降且更平滑);反之若惩罚不合适,模型可能通过增长长度或变得更随机以探索规避手段,熵可异常升高。
- 两者的综合效果是训练更加稳定,模型更容易学到真正提高任务指标(如数学题正确率)的推理策略,而不是学习避开截断惩罚的表面技巧。
五、实现细节与工程建议(基于论文与常见实践)
- 如何判断"被截断":在生成时记录实际生成 token 数 ∣y∣|y|∣y∣ 与最大允许长度 LmaxL_{\max}Lmax,若生成被强制停止且 ∣y∣≥Lmax|y|\ge L_{\max}∣y∣≥Lmax 则视为被截断。注意对于 streaming/pipeline 生成要在服务端协同判断。
- Overlong Filtering 的实现示例(伪代码):
- 在采样组 {oi}\{o_i\}{oi} 后,计算奖励 RiR_iRi 与是否截断标志 truncated_i。
- 仅将满足 truncated_i == False 的样本加入用于计算组内均值/方差及 surrogate 的集合;若组内有效样本数太少,重采样或丢弃该组(Dynamic Sampling)。
- Soft Overlong Punishment 的参数选择:论文里给了一个实用设置(用于 Qwen-32B)------设置 Lmax=16384L_{\max}=16384Lmax=16384,Lcache=4096L_{\text{cache}}=4096Lcache=4096(即最大生成设为 204802048020480,其中 163841638416384 是期望最大长度,额外 409640964096 作为软惩区间)。你可以根据任务调整比例与绝对值。
- 注意 Dynamic Sampling 的配合:Filtering 会降低每次采样的有效样本数,需用动态采样缓冲保证每个批次仍有足够的有效组,否则会牺牲训练效率或引入别的偏差。
- 数值/稳定性:对 reward 做归一和 σ\sigmaσ 下界(σ←max(σ,ε)\sigma\leftarrow\max(\sigma,\varepsilon)σ←max(σ,ε))仍然需要,即便做了过滤/soft punishment,也需避免方差为 0 或过小。
六、可做的消融实验与进一步研究方向(建议)
- 对比(A)hard filtering,(B)soft punishment,以及(C)不处理三种策略对最终性能、训练方差、熵和生成长度分布的影响。
- 在 soft punishment 中尝试不同的 penalty 曲线(线性、二次、sigmoid)并评估哪种对 long-CoT 更有利。
- 研究 learnable penalty:用小网络预测"截断惩罚"的尺度或直接训练一个 value 模型去估算"被截断时的真实回报",以减少启发式门限对不同任务的敏感性。
- 分析 filtering 对样本多样性与过拟合的影响:剔除过长样本是否导致模型丧失学习复杂长链推理的机会?是否需要在后期逐步放宽过滤策略?
七、总结(一句话)
- 图 5 说明了:不恰当地惩罚被截断的过长生成会引入强噪声并破坏训练(表现为准确率下降和熵异常),而通过 Overlong Filtering 或 Soft Overlong Punishment 可以显著降低这种噪声,使训练更稳定并提升下游任务性能。
如果你想,我可以把 Overlong Filtering 与 Soft Overlong Punishment 的具体计算伪代码贴出来(包含如何在组内计算 RiR_iRi、如何标记截断、如何与 Dynamic Sampling 协同),或者帮你基于你自己的任务(告诉我典型生成长度/奖励范围)给出推荐的 LmaxL_{\max}Lmax、LcacheL_{\text{cache}}Lcache 与 ε\varepsilonε 值。你想看哪一个?
好的,我来把公式 (13)(论文中用于 Overlong Reward Shaping 的分段惩罚函数)做一个完整、严格且易于实现的详解:公式、几何意义、为什么这么设计、数值例子、实现伪码、工程注意事项和可替代方案。含数学的句子我都用 LaTeX 表示。
-
推荐的、易理解的分段形式(把论文中排版混乱的版本整理成对称且易实现的表达):
Rlength(y)={0,∣y∣≤Lmax−Lcache,−∣y∣−(Lmax−Lcache)Lcache,Lmax−Lcache<∣y∣≤Lmax,−1,∣y∣>Lmax. R_{\text{length}}(y)= \begin{cases} 0, & |y| \le L_{\max}-L_{\text{cache}},\\6pt -\dfrac{|y|-(L_{\max}-L_{\text{cache}})}{L_{\text{cache}}}, & L_{\max}-L_{\text{cache}}<|y|\le L_{\max},\\8pt -1, & |y|>L_{\max}. \end{cases} Rlength(y)=⎩ ⎨ ⎧0,−Lcache∣y∣−(Lmax−Lcache),−1,∣y∣≤Lmax−Lcache,Lmax−Lcache<∣y∣≤Lmax,∣y∣>Lmax.解释:∣y∣|y|∣y∣ 表示生成的 token 数(response length);LmaxL_{\max}Lmax 是期望的"目标最大长度";LcacheL_{\text{cache}}Lcache 是一个软惩罚区间的宽度(paper 中用作从 0 到 -1 的线性衰减区间)。
-
该函数的直观含义与动机
- 当 ∣y∣≤Lmax−Lcache|y|\le L_{\max}-L_{\text{cache}}∣y∣≤Lmax−Lcache 时,不施加长度惩罚,令 Rlength(y)=0R_{\text{length}}(y)=0Rlength(y)=0,即"在安全区间内不惩罚"。
- 当 Lmax−Lcache<∣y∣≤LmaxL_{\max}-L_{\text{cache}}<|y|\le L_{\max}Lmax−Lcache<∣y∣≤Lmax 时,按超出程度做线性惩罚,幅度从 000 线性减少到 −1-1−1,这相当于"告诉模型越靠近上限越不被鼓励,但给予平滑的梯度信号让模型逐步缩短"。
- 当 ∣y∣>Lmax|y|>L_{\max}∣y∣>Lmax 时,给出固定的强惩罚 −1-1−1(或最大惩罚),表示严重超长/被截断的情况应强烈避免。
- 设计动机是避免"一刀切"的硬惩罚把正确但稍长的推理误判为坏样本,同时对明显过长或被截断的样本施以较强惩罚,从而减少 reward noise 并提供有意义的梯度信号。
- 与原始正确性奖励的组合方式(实际训练中常见)
- 若原始规则奖励为 Rcorrect(y)∈{0,1}R_{\text{correct}}(y)\in\{0,1\}Rcorrect(y)∈{0,1}(正确为 1,错误为 0),则实际用于训练的总奖励常取为:
Rtotal(y)=Rcorrect(y)+Rlength(y). R_{\text{total}}(y)=R_{\text{correct}}(y)+R_{\text{length}}(y). Rtotal(y)=Rcorrect(y)+Rlength(y). - 这样当答案正确且长度正常时,Rtotal=1R_{\text{total}}=1Rtotal=1;当答案正确但接近上限或超出上限时,RtotalR_{\text{total}}Rtotal 会相应变小(甚至为负),从而让奖励既反映正确性又兼顾长度约束。
- 具体数值示例(使用论文里的超参数示例)
- 论文训练细节里给的示例参数为 Lmax=16384L_{\max}=16384Lmax=16384,Lcache=4096L_{\text{cache}}=4096Lcache=4096(于是允许最大生成为 Lmax+Lcache=20480L_{\max}+L_{\text{cache}}=20480Lmax+Lcache=20480 但软惩区间从 122881228812288 到 163841638416384):
- 若 ∣y∣=12000|y|=12000∣y∣=12000,因为 12000≤1228812000\le 1228812000≤12288,所以 Rlength(y)=0R_{\text{length}}(y)=0Rlength(y)=0;若答案正确则 Rtotal=1R_{\text{total}}=1Rtotal=1。
- 若 ∣y∣=13000|y|=13000∣y∣=13000,则
Rlength(y)=−13000−122884096≈−7124096≈−0.174, R_{\text{length}}(y)=-\frac{13000-12288}{4096}\approx -\frac{712}{4096}\approx -0.174, Rlength(y)=−409613000−12288≈−4096712≈−0.174,
若答案正确则 Rtotal≈0.826R_{\text{total}}\approx 0.826Rtotal≈0.826。 - 若 ∣y∣=16384|y|=16384∣y∣=16384,则 Rlength(y)=−1R_{\text{length}}(y)=-1Rlength(y)=−1,若答案正确總賞為 000;若 ∣y∣>16384|y|>16384∣y∣>16384 同样 Rlength=−1R_{\text{length}}=-1Rlength=−1(严格超限时为最重惩罚)。
- 为什么要用"线性软惩罚 + 硬阈值"而不是直接硬惩罚或完全过滤
- 线性软惩罚在 Lmax−LcacheL_{\max}-L_{\text{cache}}Lmax−Lcache 到 LmaxL_{\max}Lmax 之间提供平滑的梯度信号,有助于模型逐步学习缩短无益的冗余生成,而不是在一次训练步被强烈否定后出现剧烈策略摆动。
- 硬阈值(−1-1−1)用于明确区分"超限已导致截断/严重过长"的不可接受情形。
- 相比完全过滤(overlong filtering),soft punishment 在保留样本作为训练信号的同时以惩罚引导行为,能更高效利用数据;同时 filtering 与 soft punishment 可并用(paper 中先后提出两种策略并比较)。
-
实现伪代码(把 R_length 与总 reward 结合并与 group-normalization 配合)
注意:下列伪代码中含数学表达,已以 LaTeX 风格在行内/块内给出。伪代码:计算单个样本的 length penalty 与总 reward
输入: response y, reference answer a,
L_max, L_cachelen_y = |y| # 生成的 token 数
计算 length penalty R_length(y)
if len_y <= L_max - L_cache:
R_length = 0
elif len_y <= L_max:
R_length = - (len_y - (L_max - L_cache)) / L_cache
else:
R_length = -1计算 correctness reward R_correct(例如 1 或 0)
R_correct = is_equivalent(a, y) ? 1 : 0
总 reward
R_total = R_correct + R_length
将 R_total 用于组内归一化,计算 advantage:
mu_R = mean({R_total_j}), sigma_R = std({R_total_j})
A_hat_i = (R_total_i - mu_R) / max(sigma_R, eps)
-
工程注意事项(避免数值/训练问题)
- 确保 ∣y∣|y|∣y∣ 的统计口径一致:使用相同 tokenizer 和计数方式(byte-pair / subword 等)。
- 在计算 σR\sigma_RσR 时要做下界处理:σR←max(σR,ε)\sigma_R\leftarrow\max(\sigma_R,\varepsilon)σR←max(σR,ε) 以避免除零或极小方差导致优势爆炸。
- 如果许多样本被判为 ∣y∣>Lmax|y|>L_{\max}∣y∣>Lmax(超限),则大量 Rlength=−1R_{\text{length}}=-1Rlength=−1 会导致组内 reward 分布偏低或方差小,需搭配 Dynamic Sampling 或过滤策略保证训练稳定。
- 是否把 RtotalR_{\text{total}}Rtotal 进一步 clip 到某个范围(例如 −1,1-1,1−1,1)可按实验决定,常见做法是保证 reward 在合理范围内以便训练超参数易调。
- 若任务中答案本身倾向较长的正确推理,LmaxL_{\max}Lmax 与 LcacheL_{\text{cache}}Lcache 的选择需慎重;过小的 LmaxL_{\max}Lmax 会把有用的长推理误判为过长。
- 可替代/扩展的惩罚曲线(供研究或调参)
- 线性(当前)是最简单且可解释的。可以试以下变体:
- 二次惩罚(惩罚随超长度平方增长):Rlength(y)=−(∣y∣−(Lmax−Lcache)Lcache)2R_{\text{length}}(y)=-\left(\frac{|y|-(L_{\max}-L_{\text{cache}})}{L_{\text{cache}}}\right)^2Rlength(y)=−(Lcache∣y∣−(Lmax−Lcache))2
- Sigmoid/平滑饱和:Rlength(y)=−σ (α(∣y∣−(Lmax−Lcache)))R_{\text{length}}(y)=-\sigma\!\Big(\alpha\big(|y|-(L_{\max}-L_{\text{cache}})\big)\Big)Rlength(y)=−σ(α(∣y∣−(Lmax−Lcache))) 并缩放到 −1,0-1,0−1,0,其中 α\alphaα 控制陡峭度。
- Learnable penalty:训练一个小网络预测长度惩罚,以适配不同题型(需要额外的正则化以防学到 trivial 解)。
- 每种曲线对优化动态有不同影响:二次惩罚更强烈地抑制靠近上界的长度,sigmoid 则更平滑。
- 选择 LcacheL_{\text{cache}}Lcache 的经验建议
- 论文使用 Lcache=4096L_{\text{cache}}=4096Lcache=4096 与 Lmax=16384L_{\max}=16384Lmax=16384(即软惩区间占 LmaxL_{\max}Lmax 的 25%25\%25%)。经验上 Lcache∈0.1Lmax, 0.3LmaxL_{\text{cache}}\in0.1L_{\\max},\\,0.3L_{\\max}Lcache∈0.1Lmax,0.3Lmax 是一个合理起点,但具体任务需调参:若正确推理通常非常长,则应增大 LcacheL_{\text{cache}}Lcache 或提高 LmaxL_{\max}Lmax;若希望严格控制长度,则减小 LcacheL_{\text{cache}}Lcache。
- 总结要点(快速回顾)
- 公式 (13) 给出了一种"线性软惩罚 + 硬阈值"的长度惩罚函数,表达为:
Rlength(y)={0,∣y∣≤Lmax−Lcache,−∣y∣−(Lmax−Lcache)Lcache,Lmax−Lcache<∣y∣≤Lmax,−1,∣y∣>Lmax. R_{\text{length}}(y)= \begin{cases} 0, & |y| \le L_{\max}-L_{\text{cache}},\\4pt -\dfrac{|y|-(L_{\max}-L_{\text{cache}})}{L_{\text{cache}}}, & L_{\max}-L_{\text{cache}}<|y|\le L_{\max},\\4pt -1, & |y|>L_{\max}. \end{cases} Rlength(y)=⎩ ⎨ ⎧0,−Lcache∣y∣−(Lmax−Lcache),−1,∣y∣≤Lmax−Lcache,Lmax−Lcache<∣y∣≤Lmax,∣y∣>Lmax. - 把它加到正确性奖励上(Rtotal=Rcorrect+RlengthR_{\text{total}}=R_{\text{correct}}+R_{\text{length}}Rtotal=Rcorrect+Rlength)可以平滑地惩罚过长生成,减少截断带来的 reward noise 并使训练更稳定,但需与归一化、下界 clipping、dynamic sampling 等策略配合使用。
如果你想,我可以:
- 给出一个具体的 NumPy/PyTorch 函数实现以便直接替换到你训练代码中;或
- 基于你手头任务的典型生成长度和 reward 范围,帮你推荐具体的 LmaxL_{\max}Lmax、LcacheL_{\text{cache}}Lcache 与 ε\varepsilonε 设置,并预测可能的训练行为。你想要哪个?