一、适用场景
适用场景:驱动小型直流电机或步进(两相)做原型(小车、舵机减速箱直驱、机器人驱动轮)、练习 PWM 速度控制与 H 桥方向控制、功率/散热比较与选型教学。
二、器材清单
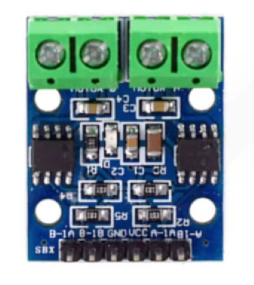
L9110S 双通道电机驱动模块(适合小电流直流电机) ×1
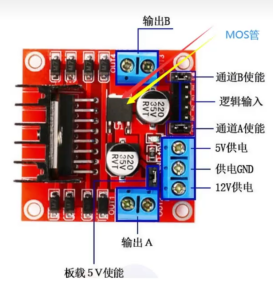
L298N 双 H 桥功率驱动模块(适合更高电压/电流场合,常见带散热片与跳线) ×1
stm32f103(或其它 STM32)开发板 ×1
电源:对应电机电压的电源(电机供电)和 5V/3.3V 的逻辑电源(视模块)×各1(注意:电机电源与 MCU 需共地)
若干杜邦线 / 螺丝端子线 ×若干
三、工作原理(要点)
L9110S:小型双 H 桥驱动,典型工作电压范围约 2.5V--12V,每通道约 800mA 连续 驱动能力(峰值可短时更高,模块与封装会限制峰值)。适合小 DC 电机与低转矩机器人。Elecrow+1
L298N:经典双 H 桥功率 IC,支持更高电压(Vs 可达 ~46V )与更大电流( datasheet 标注每桥 DC 连续约 2A,峰值更高,总体可视为双通道合计可达 ~4A 的能力,但实际使用还要看散热与模块设计)。L298 需要注意电压降(饱和压 VCEsat)与热耗(需散热)。STMicroelectronics
控制思路(两者共通):方向由两路数字输入(IN1/IN2 或 A1/A2)组成的逻辑决定(01 正转、10 反转、00/11 制动或放电,视接法),速度由 PWM 调制使能/输入脚控制(对 L298N 通常在 ENA/ENB 上做 PWM;L9110S 可对其中一路输入做 PWM,另一路固定为高/低 实现方向与速度)。
四、接线示意
VCC → +5V
GND → GND
注意:由于厂家不同,制作出的电机模块引脚也不一定,所以,这里不做保证,根据实际情况配置
五、示例代码(以L9110S举例,L298N修改一下引脚也能用)
标准库
cpp
#include "forward_direction.h"
#include "stm32f10x.h"
void em_init()
{
GPIO_InitTypeDef PB;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD,ENABLE);
PB.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9 | GPIO_Pin_14 | GPIO_Pin_15;
PB.GPIO_Mode = GPIO_Mode_Out_PP;
PB.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&PB);
//将所有轮子停下
GPIO_SetBits(GPIOB, GPIO_Pin_9); //1
GPIO_SetBits(GPIOB, GPIO_Pin_8); //1
GPIO_SetBits(GPIOB, GPIO_Pin_7); //1
GPIO_SetBits(GPIOB, GPIO_Pin_6); //1
GPIO_SetBits(GPIOB, GPIO_Pin_15); //1
GPIO_SetBits(GPIOB, GPIO_Pin_14); //1
GPIO_SetBits(GPIOB, GPIO_Pin_1); //1
GPIO_SetBits(GPIOB, GPIO_Pin_0); //1
}
void goforward()
{
//B
GPIO_ResetBits(GPIOB, GPIO_Pin_7); //1
GPIO_SetBits(GPIOB, GPIO_Pin_6); //0
//D
GPIO_SetBits(GPIOB, GPIO_Pin_15); //0
GPIO_ResetBits(GPIOB, GPIO_Pin_14); //1
//A
GPIO_SetBits(GPIOB, GPIO_Pin_9); //0
GPIO_ResetBits(GPIOB, GPIO_Pin_8); //1
//C
GPIO_ResetBits(GPIOB, GPIO_Pin_1); //1
GPIO_SetBits(GPIOB, GPIO_Pin_0); //0
}
void goback()
{
//B
GPIO_SetBits(GPIOB, GPIO_Pin_7); //1
GPIO_ResetBits(GPIOB, GPIO_Pin_6); //0
//D
GPIO_ResetBits(GPIOB, GPIO_Pin_15); //0
GPIO_SetBits(GPIOB, GPIO_Pin_14); //1
//A
GPIO_ResetBits(GPIOB, GPIO_Pin_9); //0
GPIO_SetBits(GPIOB, GPIO_Pin_8); //1
//C
GPIO_SetBits(GPIOB, GPIO_Pin_1); //1
GPIO_ResetBits(GPIOB, GPIO_Pin_0); //0
}
void goleft()
{
//B
GPIO_SetBits(GPIOB, GPIO_Pin_7); //1
GPIO_SetBits(GPIOB, GPIO_Pin_6); //0
//D
GPIO_SetBits(GPIOB, GPIO_Pin_15); //0
GPIO_ResetBits(GPIOB, GPIO_Pin_14); //1
//A
GPIO_SetBits(GPIOB, GPIO_Pin_9); //0
GPIO_SetBits(GPIOB, GPIO_Pin_8); //1
//C
GPIO_ResetBits(GPIOB, GPIO_Pin_1); //1
GPIO_SetBits(GPIOB, GPIO_Pin_0); //0
}
void goright()
{
//B
GPIO_ResetBits(GPIOB, GPIO_Pin_7); //1
GPIO_SetBits(GPIOB, GPIO_Pin_6); //0
//D
GPIO_SetBits(GPIOB, GPIO_Pin_15); //0
GPIO_SetBits(GPIOB, GPIO_Pin_14); //1
//A
GPIO_SetBits(GPIOB, GPIO_Pin_9); //0
GPIO_ResetBits(GPIOB, GPIO_Pin_8); //1
//C
GPIO_SetBits(GPIOB, GPIO_Pin_1); //1
GPIO_SetBits(GPIOB, GPIO_Pin_0); //0
}
void stop()
{
//B
GPIO_SetBits(GPIOB, GPIO_Pin_7); //1
GPIO_SetBits(GPIOB, GPIO_Pin_6); //0
//D
GPIO_SetBits(GPIOB, GPIO_Pin_15); //0
GPIO_SetBits(GPIOB, GPIO_Pin_14); //1
//A
GPIO_SetBits(GPIOB, GPIO_Pin_9); //0
GPIO_SetBits(GPIOB, GPIO_Pin_8); //1
//C
GPIO_SetBits(GPIOB, GPIO_Pin_1); //1
GPIO_SetBits(GPIOB, GPIO_Pin_0); //0
}
#include "stm32f10x.h"
#include "forward_direction.h"
int main()
{
int i;
em_init();
while(1)
{
goforward();
for(i=0;i<10000000;i++);
goback();
for(i=0;i<10000000;i++);
goright();
for(i=0;i<10000000;i++);
goleft();
for(i=0;i<10000000;i++);
stop();
for(i=0;i<10000000;i++);
}
// return 0;
}HAL库
cpp
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
void goforward(void);
void goback(void);
void goright(void);
void goleft(void);
void stop(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
int i=0;
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
/* USER CODE BEGIN 2 */
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
goforward();
for(i=0;i<10000000;i++);
goback();
for(i=0;i<10000000;i++);
goright();
for(i=0;i<10000000;i++);
goleft();
for(i=0;i<10000000;i++);
stop();
for(i=0;i<10000000;i++);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_NONE;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_HSI;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_0) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* USER CODE BEGIN MX_GPIO_Init_1 */
/* USER CODE END MX_GPIO_Init_1 */
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3
|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
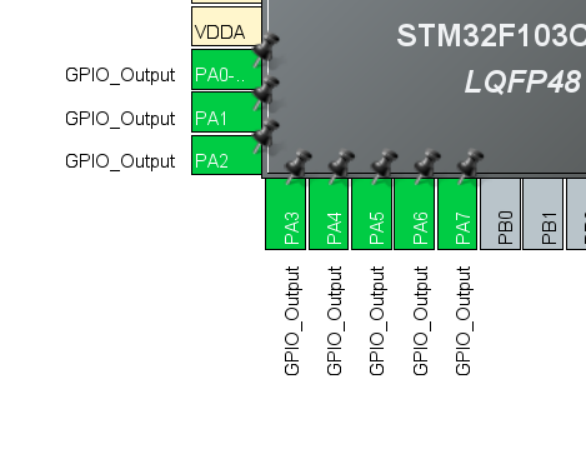
/*Configure GPIO pins : PA0 PA1 PA2 PA3
PA4 PA5 PA6 PA7 */
GPIO_InitStruct.Pin = GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_3
|GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USER CODE BEGIN MX_GPIO_Init_2 */
/* USER CODE END MX_GPIO_Init_2 */
}
/* USER CODE BEGIN 4 */
void goforward()
{
//B
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET);
//D
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);
//A
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_SET);
//C
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_SET);
}
void goback()
{
//B
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
//D
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET);
//A
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
//C
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET);
}
void goleft()
{
//B
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET);
//D
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);
//A
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_SET);
//C
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_SET);
}
void goright()
{
//B
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET);
//D
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET);
//A
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_SET);
//C
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET);
}
void stop()
{
//B
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_2,GPIO_PIN_SET);
//D
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6,GPIO_PIN_SET);
//A
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_4,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_5,GPIO_PIN_SET);
//C
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_0,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_1,GPIO_PIN_SET);
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */六、讲解视频